基于RBF网络监督的电池用双向DC/DC变换器控制策略
2018-09-20张融悉张春
张融悉, 张春
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
0 引 言
随着时代与技术的发展,蓄电池、双向DC/DC变换器在诸如电动汽车[1]、微电网和储能系统[2-3]等方面应用广泛。电池储能系统中应用较为广泛的电池种类包括铅酸电池、铅炭电池、锂电池和钠硫电池等。蓄电池作为电化学储能设备,具有建设周期短、运营成本低和对环境无影响等特点,已经成为电网应用储能技术解决新能源接入的首选方案。然而蓄电池的寿命受到了许多因素的制约,特别是充放电过程对蓄电池容量及寿命的影响很大,因此与蓄电池匹配的变换器输出需要严格把关,尽量避免影响蓄电池的使用寿命[4-5]。
而由于蓄电池本身和变换器电路中含有的开关器件、电感电容等使得蓄电池充馈电过程存在许多非线性因素,为获得良好的控制效果,许多学者对双向DC/DC变换器的控制策略进行了研究,文献[6]结合传统PID控制优点,提出了变换器非线性PID解耦控制策略,文献[7]83提出一种基于变量代换和参数估计的复合校正电流内环、电压外环双闭环解耦控制策略。然而在控制器的选择上主要采用常规PID控制器且建模过程往往忽略负载的非线性特性,使得对变换器系统的控制精度等方面存在缺陷。
对于无法精确描述其数学模型的非线性系统,神经网络控制已成为一种有效途径。RBF神经网络作为一种前向神经网络,具有结构简单、训练简洁、学习收敛速度快和能够以任意精度逼近任意连续函数等特点。因此基于RBF网络的控制器已得到了广泛应用[8]。本文针对电池用双向DC/DC变换器非线性系统的控制及调节,在传统PID双闭环控制策略基础上进行了优化,提出了RBF神经网络对PID控制器进行监督的控制策略,改善变换器电池侧电压电流纹波特性,从而提升电池充放电的质量。
1 拓扑结构及原理
1.1 拓扑结构
图1所示为2个背靠背半桥式并联拓扑结构的两重化双向DC/DC变换器主电路结构。其中VT1~VT4为IGBT,每个IGBT都反并联了二极管D。LmA和LmB为滤波电感,Cbat和Cdc分别为电池侧与直流侧滤波电容。本文采用上下桥臂互补导通方式。当VT1、VT3工作时,电路运行在Buck模式即充电状态,当VT2、VT4工作时,电路运行在Boost模式即馈电状态。
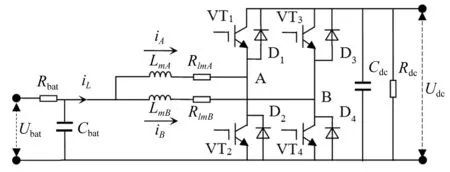
图1 两重化双向DC/DC变换器主电路拓扑结构
1.2 工作原理
1)变换器
该变换器两端电压方向不变,电流方向可变,即该电路可在两个象限单独运行或在两个象限同时运行,从而可实现蓄电池的充电、放电以及充放电交替。对于A桥臂,通过状态空间平均法得到其模型如式(1)所示,由上至下依次为:Boost、Buck电压方程;Boost电流方程;Buck电流方程,其中D为占空比。同理可得B桥臂模型。
(1)
2)蓄电池
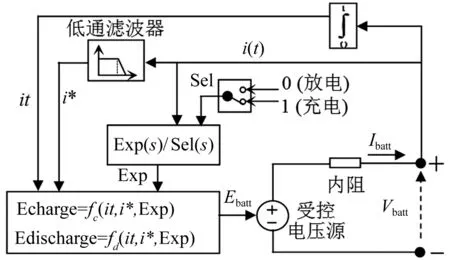
图2 蓄电池模型原理图
如图2所示,该蓄电池模型来自Simulink模型库,模型由电池内阻与受控电压源组成。式(2)为试验所用电池模型的充放电表达式,fc、fd为Ebatt(非线性电压),分别代表蓄电池充放电时受控电压源大小。
(2)
式中:E0为恒定电压,V;Exp(s)为指数区动态电压,V;Sel(s)表示电池模式;K为极化电阻,Ω;i*动态低频电流,A;it为提取容量,Ah;Q为最大电池容量,Ah。
由式(1)、式(2)可知,变换器系统模型具有非线性特性,这对模型的处理以及控制系统的设计带来了困难。文献[7]85中电池用变换器采用电压电流双闭环PID控制,达到了较为理想的控制效果,但在纹波特性上存在缺陷。为保留PID控制器优良的控制特性并提升对该变换器系统的控制精度,本文采用RBF神经网络对PID控制器进行监督控制以实现对系统非线性的调节,避免了建模的复杂性和通常情况下建模时会忽略电池负载的非线性特性。
2 变换器控制系统设计
2.1 电压电流双闭环控制
A、B两相电流内环以流经各自线路滤波电感的电流作为各自控制环的反馈。当给予两电流控制环相同的电流给定值时,即使A、B两相线路电流值不同,通过各自控制环进行PI调节逼近给定值,可以实现均流的目的并有效抑制线路环流的形成。
1)恒流控制
关闭电压环给予A、B两相电流环的均分给定量,使A、B两相电流环有相同的电流给定值。给定值需依据蓄电池属性合理安排,负值实现充电状态,正值实现放电状态。
2)恒压控制
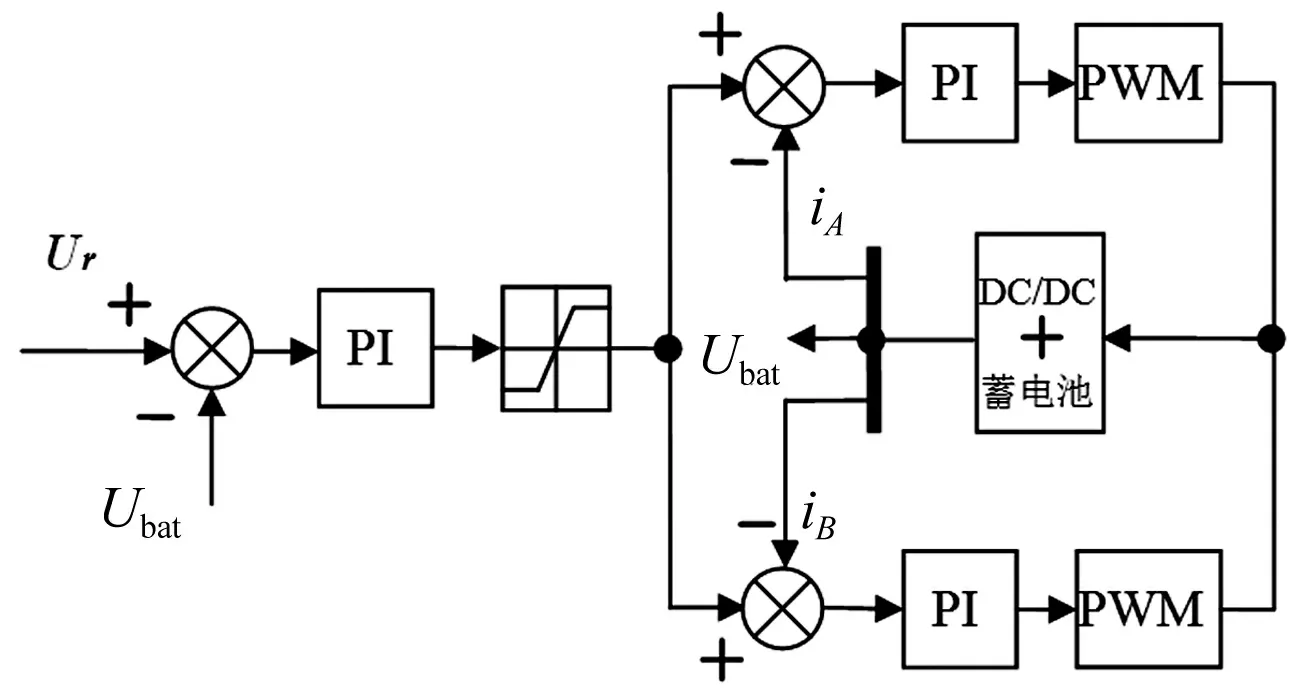
图3 双向DC-DC变换器基本控制图
如图3所示,恒压给定量Ur与电池电压Ubat比较后经PI调节再均分为两个电流环的给定值,并通过PWM控制实现恒压的目的。恒压控制可用于电池的充放电(电流环给定需补偿),也可以使蓄电池运行在充放电交替状态,用于维持直流侧电压的恒定。
2.2 RBF网络结构与监督算法实现
1)RBF网络结构

图4 RBF神经网络结构
图4所示为1-J-1型的RBF网络结构,单节点输入层传递信号至隐含层,隐含层J个单元的中心向量和宽度向量预先确定,网络仅隐含层与输出层之间的权值可调。隐含层执行一种固定的非线性变换,将输入空间映射到含J个单元隐含层空间,输出层在该空间实现线性组合。这种映射关系使得RBF网络能够快速收敛并具有唯一最佳逼近的特性,因此其适用于实时控制。
2)RBF网络监督控制算法
在RBF网络监督控制中,初始阶段为PI控制,而后过渡到RBF网络控制。当控制过程中出现较大误差时,PI控制起主导作用,RBF网络起调节作用,其控制原理如图5所示。具体算法如下:
隐含层的径向基向量为H= [H1,H2,H3…HJ]T,Hm为高斯函数,则:
(3)
式中:m=1,2,3…J;X(k)为网络输入,中心向量cm= [c11,c12,c13,…,c1m];标准偏差(宽度向量)bm=[b1,b2,b3,…,bm]T。cm-bm向量元的数目与大小是网络设计的关键,这一确定过程目前通用手段是先设计再检验,本文依据PI控制下系统的状态量来调试网络。
设权值向量为:
W=[W1,W2,W3,..,WJ]T
RBF网络输出为:
(4)

图5 RBF网络监督控制
在图5中,以A相电流环为例,RBF网络输入X(k)为is(k),由电压外环运算给定,因此RBF监督控制仅用于恒压控制。被控对象(PWM+DC/DC+蓄电池)的输出即反馈量为流经LmA电感的电流iA(k),RBF网络输出Y(k)为un(k)。B相电流环相同。
RBF监督控制总输出:
u(k)=un(k)+up(k)
(5)
误差指标为:
(6)
网络权值调整算法采用梯度下降法:
(7)
权值更新:
W(k)=W(k-1)+ΔW(k)+α[W(k-1)-W(k-2)]
(8)
式中:η∈(0,1)为学习速率,用于减小学习过程的振荡趋势;α∈(0,1)为惯性系数,用于加快权值更新的收敛速度。
RBF神经网络控制器充当前馈控制器,其作用在于拟合被控对象的逆模型以达到抵消其非线性性质的效果。变换器系统在常规PID闭环控制下获得了良好的稳定性,RBF网络则通过对非线性被控对象的补偿作用,提高对系统的跟踪性能,降低了系统的稳态误差。
3 试验研究
为研究RBF监督控制策略在变换器双闭环控制系统中的控制效果,本文基于MATLAB2015a/Simulink仿真平台,使用电力元件模型搭建电路进行仿真研究。系统采样间隔为1×10-4s。
如表1所示,电路参数设定为:Udc=600 V,Rdc=1 Ω,Cdc=4 mH直流母线侧参数;电感LmA=LmB=6 mH,电阻RlmA=RlmB=1e-10 Ω滤波电感参数;Rbat=0.8 Ω,Cbat=10 mH电池负载侧参数。
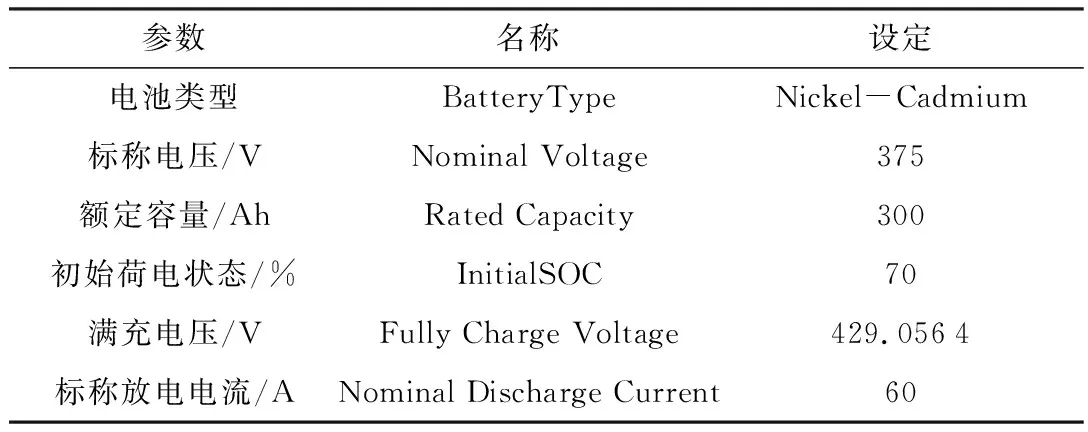
表1 蓄电池模型(Battery)主要参数

图6 RBF监督控制的Simulink实现
由于Simulink中神经网络工具箱模块无法完成网络的在线权值调整,因此本文通过编写S函数来实现RBF神经网络控制器,具体实现如图6所示。
3.1 恒压模式(以Boost工况为例)
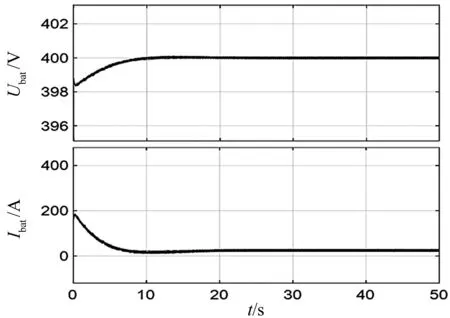
图7 Boost恒压馈电蓄电池电压电流波形(PI)

图8 恒压馈电蓄电池电压电流稳态波形(PI)
1)PI控制
馈电模式下给予电压环400 V给定量,变换器工作在400 V恒压放电状态,此时蓄电池电压电流波形如图7所示。400 V恒压放电下蓄电池维持较小的放电电流,其稳态电压电流波形如图8所示。
2)RBF监督控制(PI+RBF)
监督控制下电池输出波形如图9所示。对比图7可以看出,暂态过程中RBF监督控制存在毛刺,这是因为当电压环运算给定量is(k)的值即RBF神经网络的输入量靠近预先设定的中心向量元值时,网络输出会产生短暂的局部放大,但同时会使被控系统输出误差增大,此时PI起主导作用,RBF输出下降失去主控作用而起调节作用。

图9 Boost恒压馈电电压电流波形(PI+RBF)
图10为PI+RBF控制下蓄电池电压Ubat的稳态波形,对比图8可以看出,经过RBF网络的监督控制,恒压放电下系统稳态运行时有效降低了稳态误差,使得电压、电流波形得到了显著改善,波形平滑且脉动减小,表明通过RBF神经网络的控制与调节作用,可以有效地改善系统的非线性性质,提高对系统的控制精度。
3)频域特性比较
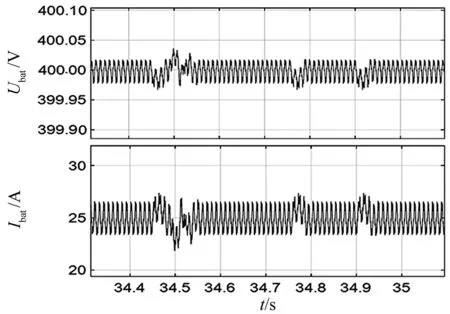
图10 恒压馈电蓄电池电压电流稳态波形(PI+RBF)
为研究图8与图10中电压稳态波形的频域特性,本文通过FFT窗口进行分析(取基频10 Hz)。取同一时段恒压Boost工况下,PI与PI+RBF的稳态波形,FFT分析结果如图11所示。从图11(a)可以看出,PI控制时,电压波主要集中在0 Hz(直流量),250 Hz以及50100 Hz频段。为降低谐波含量可设置相应的滤波器件。而从图11(b)可以看出,采用PI+RBF复合控制的低频谐波含量比例较低,主要集中在0 Hz和100 Hz。显然经过RBF监督控制下的变换器可以使用较经济的滤波器。
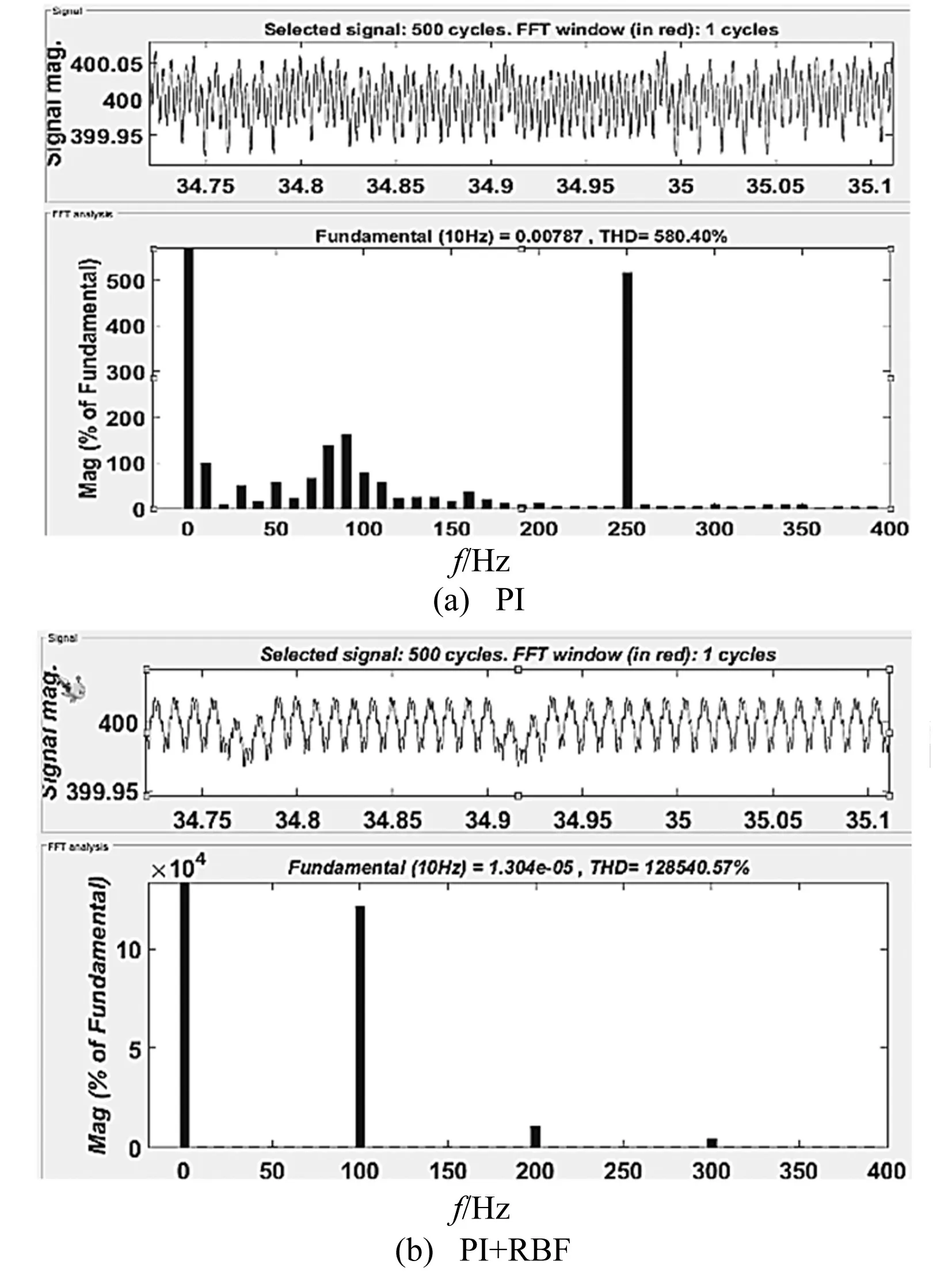
图11 Ubat波形FFT分析
3.2 工况模式切换
图12为变换器工作模式切换下电池的输出波形,电池参数为初始设定。由上到下依次为电池荷电量SOC,电压Voltage,电流Current。0~7 s时,变换器工作在Buck恒流(-100 A)充电状态,约7 s时转入Boost恒流(200 A)放电状态,约13 s时转入Boost恒压(PI+RBF)(400 V)放电状态。可以看出,恒流控制适合电池的快速充放电,恒压控制适用于电池的缓慢充放电。

图12 工况转换时波形图
由图9和图12可知,RBF网络监督控制下的变换器输出波形在暂态过程中存在毛刺现象,若长久如此会对蓄电池寿命造成不良影响。为此,初始时系统可仅采用PI控制,待系统达到稳态时并入RBF神经网络监督控制。图13为恒压Boost放电模式工况转换的蓄电池输出波形。对比图9不难发现,若在PI控制下系统已稳定运行时并入RBF网络,能够有效避免暂态过程中的毛刺现象,从而提高系统运行的可靠性。但是由于训练过程的缺乏,使得网络权值的学习过程有所折扣,即网络的调节能力有所下降,但RBF监督控制效果仍优于PI控制。

图13 工况转换时波形图(PI→PI+RBF)
4 结束语
本文提出将RBF神经网络监督控制运用于双向DC/DC变换器的双闭环控制系统中,通过Simulink仿真平台建立了基于电池用的双向DC/DC变换器模型,进行了恒流恒压的控制策略以及变换器工作模式之间转换时蓄电池特性的研究。试验结果表明,引入RBF神经网络监督控制可以有效调节蓄电池的非线性特性,使得其电压电流纹波特性得到显著改善,这对延长蓄电池寿命是极为有利的。
