基于LabVIEW图像处理的弓网拉弧在线监测研究
2018-09-20伍川辉
吴 琛,伍川辉,杨 恒,卿 云
(西南交通大学机械工程学院,成都 610031)
电弓与接触网之间的滑动摩擦、受电弓的上下振动、受电弓由于机车横向摆动形成的横向振动、受电弓和接触网之间发生水平和垂直方向的撞击等诸多因素均会引起弓网接触不良,导致受流质量下降,严重时受电弓脱离接触网的瞬间就会产生拉弧现象[1]。
拉弧作为牵引供电中一种十分有害的现象,会对弓网产生严重烧蚀,加快接触网和受电弓滑板的磨耗,同时会对周围通讯设备造成高频电磁干扰,产生高频噪声,降低乘坐舒适性[2-8]。
由于受电弓在列车运行过程中与接触网接触,处于高压环境中,无法通过接触式方式进行检测。因此,利用紫外相机实时拍摄列车运行过程中的弓网视频图像,采用基于LabVIEW的图像处理方法对弓网拉弧进行在线监测,结果表明,该方法能够在列车运行过程中实时准确提取出拉弧产生位置,计算拉弧持续时间和燃弧率,并且不会改变受电弓的工作特性。
1 弓网拉弧在线监测系统设计
弓网拉弧现象的特征光谱中只有属于紫外光波段的244~269 nm波段[3]。紫外相机的采集高敏波段位于紫外光谱中,可以有效检测拉弧现象的光特征量,合理降低了太阳光对拉弧检测的影响。同时紫外相机的帧率最高可达1 230 fps,满足拉弧检测需检测持续时间为5 ms及以上的离线火花的要求[6-10]。因此将紫外相机作为拍摄拉弧视频的硬件设备。
将紫外相机固定在车厢顶部正中间位置,调整角度,使得镜头正对受电弓,保证拍摄范围涵盖列车运行过程中受电弓的运动范围。紫外相机的安装如图1所示。

图1 紫外相机安装示意
在列车行驶过程中,紫外相机提供受电弓和接触网工作的实时图像。视频图像通过Camera Link传输线实时传送给插在测试工作站主板上的图像采集卡,工作站获取受电弓视频后,通过基于LabVIEW的图像处理技术,对列车行驶过程中的拉弧现象进行判定,并存储数据。对拉弧的在线监测为本系统的创新点,用LabVIEW软件实现,视频实时采集后面板程序如图2所示。

图2 视频实时采集程序
弓网拉弧在线监测系统硬件设备包含1台紫外相机,1张图像采集卡和1台工作站。系统硬件结构如图3所示。

图3 系统硬件结构
2 图像算法
2.1 视频图像预处理
为了提取出拉弧的产生位置,首先通过LabVIEW程序进行图像预处理。在视频图像算法处理的对象中,研究所关注的是接触网以及受电弓与背景之间的灰度差异,以便于进行边缘检测等相关运算。通过式(1)将RGB颜色空间转换成YUV颜色空间(灰度化),大大减少了后续程序的运算量[11]。
Y=0.229R+0.587G+0.114B(1)
式中,Y代表亮度信号;R代表Red;G代表Green;B代表Blue。
在弓网图像中,拍摄的图像含有较少的随机噪声,故选取中值滤波作为去噪处理方法。中值滤波就是采用一个有奇数点的窗口在图像上滑动,窗口中心点所对应像素的灰度值用窗口内所有像素的中值进行代替。选择3×3的方形窗口进行中值滤波效果最优。
为了便于图像的分割提取,利用分段线性灰度变换方法增大对比度,提高图像细节清晰度。
图4为弓网接触原图,图5为图像预处理图:

图4 弓网接触原图

图5 图像预处理
2.2 受电弓拉弧目标提取
首先利用边缘检测算法进行视频图像的轮廓提取,采用3×3窗口的Canny算子提取边缘特征。Canny算子是一种应用高斯导数逼近的最优算子,采用非极大值抑制和滞后阈值算法检测等方法,有低错误率、高定位性和最小响应的优势,该方法更不容易被噪声所填充[12]。
在LabVIEW中是用函数IMAQ EdgeDetection和IMAQ CannyEdgeDetection来来实现边缘检测的。然后利用增幅过的Sobel双方向算子,对整幅图像进行高亮边缘检测,如图6所示。

图6 图像边缘轮廓提取
图6虽然较好地体现了整体轮廓,但部分细节分割太细化,例如接触网出现2条边缘轮廓线。为了填充细小空洞、连接临近物体和平滑边界,利用形态学进行处理[13]。首先进行膨胀运算合并轮廓边界,再利用腐蚀命令细化轮廓,最后利用骨架化命令得到轮廓整体细化[14],如图7所示。

图7 图像形态学处理
由图7可以看出,接触网位于竖直方向上,受电弓整体轮廓线位于水平方向。采用竖直投影的方法,统计每一列上所有行的像素点数目,像素点数目出现最大峰值的位置就是接触网对应存在的位置;利用水平投影的方法,可以得到受电弓滑板上边缘的所在行的位置参数信息,两者交点即为对应弓网接触中接触点的位置,根据所得结果在原图中标记接触点,如图8所示。

图8 弓网接触点标记
根据受电弓滑板及接触网的位置可知,两者交点周围即为拉弧产生的区域。在LabVIEW中将上文的弓网接触点寻找算法与区域提取ROI功能相结合,对现场试验视频图像进行在线的受电弓拉弧目标的提取,结果表明,此方法能准确地提取拉弧发生的目标位置,如图9所示。
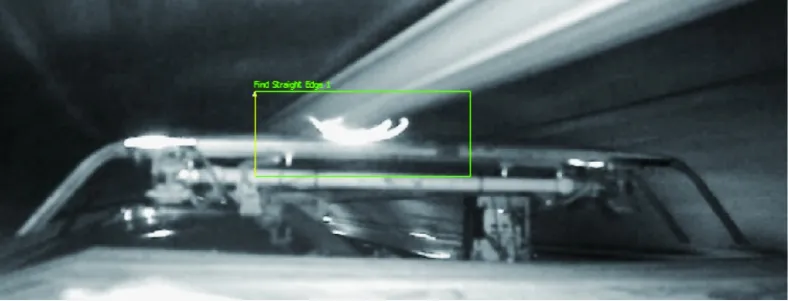
图9 受电弓拉弧目标提取
2.3 二值化
拉弧所产生的火花视觉特征比较明显,与周围其他像素相比其呈现最高灰度值,通过合适的阈值选取可以对拉弧特征进行很好的提取,算法设计中利用灰度直方图进行自适应阈值判断,再进行图像二值化。图10为拉弧二值化处理的效果。

图10 图像二值化处理
图像二值化后即可判断是否有拉弧产生。
3 拉弧在线监测及验证
3.1 拉弧在线监测流程
紫外相机实时获取受电弓工作视频图像,图像采集卡对视频图像进行采集,最后在LabVIEW程序中对其进行实时处理。首先对图像进行预处理,再对受电弓拉弧目标进行实时提取,最后通过二值化判断该帧图像是否有拉弧产生。若有拉弧产生,则统计该次拉弧持续时间和燃弧率,保存相关数据,再进行下一帧图像处理。若无拉弧产生,则直接判断下一帧图像。图11为拉弧在线监测软件流程。
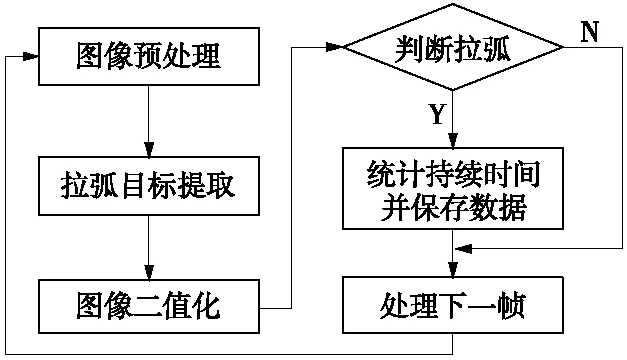
图11 拉弧在线监测软件流程
评价受流质量应计算燃弧率,燃弧率NQ由式(2)计算而得,tarc为持续大于5 ms的燃弧持续时间,ttotal为测量电流超过标称电流30%的时间[15-16](通过网流传感器获取)。
(2)
3.2 验证分析
为了验证紫外相机与基于LabVIEW的图像处理技术能否满足在线监测要求,利用该套设备及程序对列车运行过程中的受电弓拉弧进行实时在线监测。LabVIEW程序前面板运行过程如图12所示。

图12 程序运行过程
图12中右侧为动态拉弧目标提取视频;左侧为动态拉弧持续时间曲线,横坐标为当前时刻,纵坐标为持续时间,能够实时显示拉弧持续时间并计算燃弧率;最终可以得出该段列车运行路程中单次拉弧的持续时间、拉弧产生总次数以及燃弧率。实现了弓网拉弧的在线监测。
图像数据处理结果与原始视频均能够实时保存到指定路径中。试验结束之后对保存的数据截取一段进行分析,如图13所示。

图13 拉弧数据分析
由图13可以看出,在截取的一段试验数据中,一共产生了10次拉弧,最短拉弧持续时间为20 ms,最长拉弧持续时间为60 ms,结合网流传感器提供的数据,得出燃弧率为0.8052%。对该段视频进行人工观察分析,可以得出总共发生10次拉弧,并且在有隧道内灯光与太阳光干扰的情况下也并未产生误判。
取出同一段试验线路中,2个紫外传感器的测试数据进行对比分析,如图14所示。

图14 紫外传感器的输出电压曲线
由图14可以看出,在该段路线中,紫外传感器1产生了1个峰值为0.513V的单脉冲信号,且脉冲持续时间约为70 ms,表示产生了1次持续时间为70 ms的拉弧;而紫外传感器2的数值一直为0,表示没有产生拉弧。但是事实上在该段线路上,一共产生了10次拉弧,而紫外传感器仅能检测出1次。
通过以上分析可知,对于拉弧检测,紫外相机的效果更优越;利用LabVIEW图像处理技术能够实现弓网拉弧的在线监测,实时显示拉弧测试相关数据,精度高,并且能够有效避免误判。
4 结论
(1)利用弓网拉弧的光谱特征,采用紫外相机拍摄列车运行过程中的受电弓工作视频,通过LabVIEW程序进行动态实时的视频图像处理,最终得出单次拉弧持续时间、拉弧产生的总次数以及燃弧率,实现了弓网拉弧的在线监测。
(2)将该在线监测方法与人工检测相比较,检测结果完全符合,验证了该方法的可行性,并且能够有效避免误判;通过对相同运行线路中紫外相机与紫外传感器两种拉弧检测手段进行对比,证明紫外相机的检测效果更加优越。