基于图像识别的流水线炭疽病青枣分拣机械手系统设计
2018-09-19卢熙达漆海霞邱俊何子玄游浩潺甘海明
卢熙达 漆海霞 邱俊 何子玄 游浩潺 甘海明
摘要:为了对优质青枣进行分拣,解决人为分拣青枣准确度低、效率差等问题,提出了基于图像识别的由Ar-duino控制的多自由度机械手,实现在流水线上对炭疽病青枣的分拣。该系统以Arduino控制板作为主控制器,结合Pixy图像识别传感器、MG995舵机和图像识别算法组成自动分拣机械手系统。通过Pixy图像识别传感器对传送线上的青枣图像进行采集,并分析获取获得青枣的大小、颜色等特征量,得出青枣的品质信息。然后由Arduino控制器控制分拣机械手动作对青枣进行分拣。实验结果表明,通过该方法对炭疽病青枣进行分拣,准确率可达80%以上。
关键词:Arduino控制;分拣机械手;图像识别
中图分类号:TP391.41 文献标识码:A doi:10.14031/j cnki.njwx.2018.06.002
0引言
海南青枣作为一种营养价值极高的亚热帶水果,近年来市场需求量急剧攀升,其产品的精深加工成为新形势下的发展重点。在这样的形势下应将提高青枣产品品质作为提高竞争力的关键。因此,青枣的产业化发展成为促进海南农民增收的重要手段之一,而对炭疽病青枣的分拣是青枣产业化过程中提高果品质量的关键技术,对提高开箱合格率、产品附加值和开拓国内外市场具有重要意义。
青枣是一种外形不规则、等级范围小、分级难度大的水果,当今国内对其分拣措施主要为人工挑选,准确率和效率无法得到保证。虽然目前市面上的工业机器人已经可以代替人工对大部分的产品进行分拣,但由于缺少对产品质量等级的识别功能,这种方法并不能对不同等级的产品进行分级分拣。而拥有图像识别系统的机器人通过图像处理算法,可自动辨别水果质量等级,进而对其进行精确分拣。
根据市场需求,现研发了一种利用Pixy图像传感器对行青枣拍照进行颜色识别,流水线上有分拣灰褐斑的炭疽病青枣的机械手,该机械手具备多个自由度,由Arduino控制模块进行运动控制,动作灵活精确。另外,针对流水线上青枣的运动特点,该机械手设计有转动底盘,便于机械手快速且准确地夹取青枣。这样就可以在不破损农产品的同时,使其分拣工作更科学、更准确,可提高农产品加工品质,降低工人的劳动强度。
1炭疽病青枣分拣机械手系统的组成和原理
该系统包括Arduino Mega 2560控制器、Pixy传感器、MG995舵机、机械手。系统工作原理为:Pixy传感器负责采集并识别青枣图像信息;Arduino控制器作为机械手的控制核心,读取青枣等级数据并将其转化为各级舵机的指令,最后向MG995舵机发出PWM脉冲信号,舵机作为执行元件驱动机械手运动。程序将体积较小、灰褐色的炭疽病青枣定为劣质品,机器人负责把形状小且颜色为灰褐色的炭疽病青枣果从传送带上分拣出来,优质的青枣继续留在传送带上。
2机械手的总体结构设计
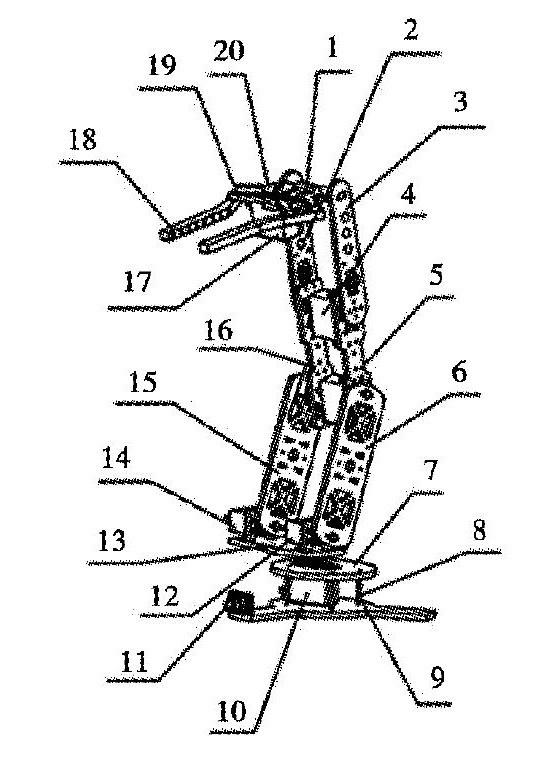
机械手的种类很多,有直角坐标式、圆柱坐标式、球坐标式、关节坐标式等。本文设计的机械手采用关节坐标式,其结构尺寸小、动作灵活,适合分拣青枣等体积较小的水果。青枣分拣机械手的结构主要由机座、下段机械臂、中段机械臂、上段机械臂和机械爪组成。其中机座采用舵机驱动进行旋转,最大旋转角度为180°,机械爪同样由舵机驱动,由齿轮传动的方式进行同步开合,可靠性高。该机械手可实现折叠、左右旋转、夹取和投放等动作。其总体结构如图所示。
3图像识别系统设计
3.1青枣病变识别算法
首先获取一组Pixy图像传感器处理后的数据,先判断镜头范围内是否有青枣存在,如有则再次判断这批青枣中是否存在灰褐色斑点,判断方法为:利用一个青枣的中心坐标和宽度高度确定了镜头内的一个区域,然后看是否有中心坐标落在这个区域内的灰褐色斑点,如有则该青枣为炭疽病青枣,否则为正常青枣。
3.2青枣等级辨别
该流水线水果分拣系统所识别的目标水果是青枣,对水果等级划分针对青枣的表面颜色斑点与大小这两个指标,而青枣的缺陷,整齐度等指标不在该系统的研究范围内。在青枣等级划分的定义中,将大而绿的青枣定义为一等品,小而有灰色斑点的炭疽病青枣定义为劣等品。
3.3图像识别系统硬件设计
本系统采用了一种开源的图像识别传感器Pixy。可实现7种颜色物体的标记并且每帧能够识别135个物体。Pixy被设计为可以与微控制器进行通讯,使用Pixy自带的数据线便可连接Pixy到Arduino。Pixy支持多种方式输出被识别物体的数据,SPI、12C、UART或模拟/数字I/O口(通过10Pin接口),Pixy还支持USB2.0。可以通过配套软件PixyMon的对话框来配置Pixy使用哪种方式,“Data out port”参数决定了输出方式。
本系统通过Pixy标记青色和灰褐色这两种颜色标志,编号为1、2,并使用了SPI的通讯方式,将摄像头数据传至Arduino。
Pixy传感器有一个官方的库,在软件设计上包含这个库文件便能实现Arduino与Pixy的信息传送,被标记物体有以下元素可被Arduino获取:
pixy.blocks[i].signature:被识别物体的标记编号;
pixy.blocks[i].x:被识别物体中心位置在x方向的坐标;
pixy.blocks[i].y:被识别物体中心位置在y方向的坐标;
pixy.blocks[i].width:被识别物体的宽度(1~320);
pixy.blocks[i].height:被识别物体的高度(1~200)。
4机械手分拣动作过程分析
当开始青枣分拣过程之后,青枣开始在流水线上被传送带带动,依次移动,此时分拣机械手位于流水线的末端,且Pixy摄像头与流水线传送带位于同一水平面上。此时,Pixy摄像头开始对位于其正前方的青枣进行摄像,接下来将图像信息传输至电子控制系统中,Arduino控制系统会根据图像识别算法对传来的图像信息做出识别,判断青枣的色泽和体积大小,得出优劣信息,进而发出下一步的命令给各级舵机,使其做出下一步的动作。
假如Arduino控制器对图像进行分析后得出的结果是青枣等级为劣质,那么Arduino控制系统将会传输信号给各级舵机,一级机械臂两侧舵机同时向下转动一定角度,控制一级机械臂向下摆动一段距离;其次,Arduino控制系统会控制三级机械臂舵机向下转动指定角度,带动三级右侧机械臂向下摆动指定角度,此时机械爪刚好位于流水线上;最后,Arduino控制系统控制机械爪开合传动齿轮转动,传动齿轮和机械爪定位杆共同运动,驱动机械爪开合,夹取流水线上的锈病青枣,然后Arduino控制系统通过控制旋转舵机转动,带动旋转底座旋转一定角度,此时,机械爪松开,将夹取的水果放到指定位置,将劣质锈病青枣从流水线上分拣出来。从而实现劣质青枣的分拣任务。
假如Arduino控制器对图像进行分析后得出的结果是青枣等级为一等,则Arduino控制系统将不会传输任何信号给各级舵机,机器人将不做任何动作。优质的水果会继续留在流水线上。
5结束语
目前,基于图像识别的流水线锈病青枣分拣机械手系统填补了国内炭疽病青枣分拣领域的空白。该系统实现了逐个青枣的智能分拣,运用图像识别技术使等级分辨更加精确,可剃除流水线上长有灰褐斑的炭疽病青枣,对于提高海南的青枣产品质量,降低工人劳动强度具有重要意义。在实际实验中,该系统具有较高的稳定性,对炭疽病青枣的分拣成功率可达80%以上,为后续青枣分拣系统的研究提供了参考。