一种无刷直流起动电机控制器设计
2018-09-19自伟
, ,自伟,
(贵州航天林泉电机有限公司,贵州贵阳550081)
0 引言
由于直流电动机具有良好的机械特性、较大的启动力矩、较宽的调速范围、不需要复杂的外围控制电路等优点,在各行业得到了广泛应用。在过去的直流电动机设计中,大多采用电刷和滑环组成的机械整流器进行机械换向,这种方式具有火花、换相噪声、寿命短、干扰无线电等诸多缺点[1-2]。随着功率半导体技术、电子技术、高性能铁磁材料制造技术的飞速发展,直流电机的无刷化应运而生,它不仅保留了直流电动机的优点,而且还具有交流电动机结构简单、运行可靠、维护方便、体积小、效率高、功率密度大等一系列优点[5-6]。
本文以额定工作电压为28 V、9 s内实现额定负载转速大于8000 r/min、额定工作电流不大于300 A的无刷直流起动电机为应用背景,阐述了一种无刷直流电动机控制器设计。本文构建了基于数字控制芯片(dsPIC30F4012)的无刷直流电动机控制系统,并结合系统要求电机堵转的功能特点,提出了一种基于无刷直流电动机相电流截止负反馈设计方案,并完成相应的硬件电路、软件控制算法设计。
1 无刷直流电动机控制方案选择
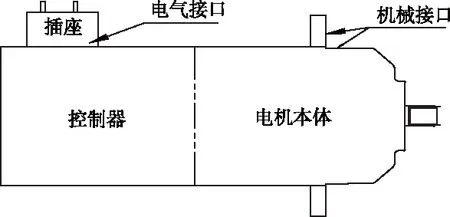
图1 无刷直流电动机组成
本文介绍的无刷直流电动机用于燃气涡轮起动机,主要功能是输出一定的转矩和转速,将燃气涡轮起动机带动至点火转速,保证成功点火。电机本体与控制器采用一体化设计方案,见图1所示。
工程应用上,对无刷直流电机的运行特性作如下假设[3]:
a)电机的气隙磁感应强度沿气隙矩形分布;
b)绕组通电时,该电流所产生的电枢反应去磁对主磁极磁通影响忽略不计;
c)功率器件在开关状态下的管压降为恒值;
d)各相绕组对称,其对应的控制单元完全一致,相应电气时间常数忽略不计;
e)传感器及控制电路等功耗忽略不计;
经过上述假设后,定义如下:
(1)

(2)
主电路和功率管的换相方式确定后,其反电动势系数和转矩系数为常数。
由以上假设得出电机的电压平衡方程[3]:
V-ΔV=Ea+IR
(3)
经式(1)、式(2)、式(3)进行变换整理后得其机械特性方程[3]:
(4)
式中:n—电机转速,r/min;V—电源电压,V;ΔV—功率管压降,V;Ke—电动势系数;KT—转矩系数;Ta—电动转矩平均值,N·m;R—无刷直流电机内阻,Ω。
由上述可知,无刷直流电机的反电动势与电机的转速成正比,转矩与相电流成正比。
根据上述分析,转矩与相电流成正比,对无刷直流电机的转矩控制转换为对相电流控制。本文要求无刷直流起动电机具有保护的功能,因此选择对电机的相电流进行控制是较合理的方案,同时通过调节功率管的PWM占空比,实现负载下的平滑运行。
2 硬件设计
2.1 系统原理框图
图2为基于dsPIC30F4012的无刷直流起动电机控制器原理框图,采用dsPIC30F4012最小系统作为主控电路,处理采集到的霍尔信号、相电流、硬件中断信号,经软件计算后,输出相应的PWM信号,从而改变无刷直流起动电机驱动电路及功率管的导通顺序,实现对电机转动的控制。DC/DC电源变换模块将输入(Vi)28 V母线电压变换为5 V和15 V,将5 V作为控制信号电源、15 V作为三相驱动电路电源;电机的霍尔位置传感器与dsPIC30F4012的CN中断输入引脚相连接;电流传感器选用LEM公司的电流传感器,供电电压为5 V,电流测量范围为±500 A,输出电压范围0 V~5 V,经相电流检测/处理电路调整为0 V~5 V后与AN0、AN1引脚相连,同时将软件配置为模拟输入模式,使用dsPIC30F4012自带的A/D采样进行采样,将采样的相电流进行数字处理,实现软件过流保护;功率管选用日本三菱公司生产的集成功率模块,其额定电压150 V,额定电流300 A,其拓扑结构为典型的三相全桥电路[7],采用高低端悬浮驱动方式,驱动电路选用IR2110高性能MOSFET驱动集成电路,IR2110驱动电路的SD引脚采用与相电流采样信号相关联的设计,当相电流超过设定值时,则会出现高电平的过流保护信号,将封锁驱动功率管的驱动信号,从而实现硬件过流保护。
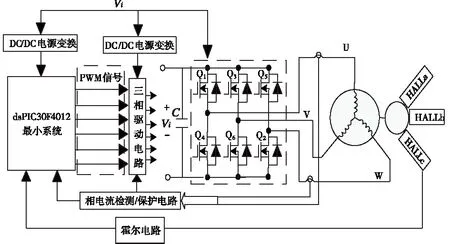
图2 无刷直流起动电机控制器原理框图
dsPIC30F4012无刷直流电机控制电路具有以下特性[4]:1)采用CMOS制造技术,具有2.5 V~5 V的宽电压供电范围、低功耗;2)模拟、数字信号控制器特性;3)丰富的外设资源;4)电机控制PWM模块;5)编程环境和编程语言简单、灵活。
2.2 驱动电路
无刷直流起动电机控制器的驱动采用IR2110硬件电路,其桥臂驱动原理图如图3所示。IR2110的工作电压为10 V~20 V,有高端悬浮输出通道,经外围电路参数匹配后,可以驱动N沟道功率MOSFET,最高电压可达600 V。将SD引脚与硬件过流保护信号相连接;当出现相电流过流时,产生高电平输入至SD引脚,IR2110的SD引脚出现高电平时即可对输出的驱动信号进行封锁,达到硬件过流保护的目的。
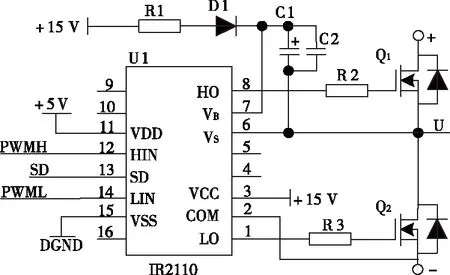
图3 IR2010S自举驱动的驱动原理图
2.3 相电流检测/保护电路
无刷直流电动机控制系统中,保护电路起到了不可或缺的部分,其作用是保护控制系统核心部件免受高压、大电流冲击而损坏,整个系统的保护设计主要由电源隔离电路、相电流检测/保护电路两部分组成。
电源隔离电路是将电机功率电压与控制电压隔离开,分成三套供电系统:28 V供电系统、5 V控制系统、15 V驱动系统。三路供电系统相互协调工作,不会因某一部分的故障导致其余电路,从而实现控制电路的保护作用。
相电流检测/保护电路是通过电流传感器将电机绕组的相电流进行采样,将电流信号转换为0 V~5 V的电压信号,通过对电压信号的控制实现对相电流的控制,本文的相电流检测/保护电路简化框图如图4所示。
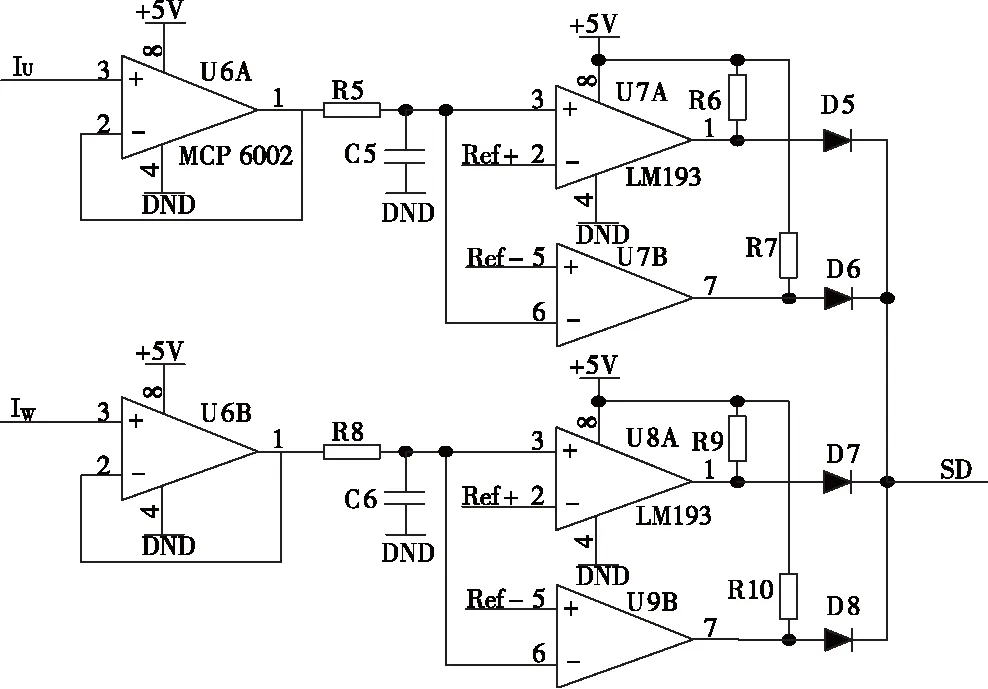
图4 相电流检测/保护电路原理图
电流传感器将U、W的相绕组的电流转换为电压信号(图4中的电气网络标识为IU、IW),经电压跟随、硬件滤波、硬件比较后,输出过流保护信号SD;电动机在运行时,绕组上的电流方向存在正向和负向,所以在设置硬件保护电流时应设置正向(标识为“Ref+”)、负向(标识为“Ref-”)电流阈值。当相电流超过正向电流设定值Ref+或超过负向电流设定值Ref-,将产生高电平的SD信号,进而封锁IR2010S驱动电路的驱动信号,同时将SD信号送至dsPIC30F4012的外部中断INT1引脚,作为软件过流中断输入信号,通过硬件、软件双重方式实现无刷直流起动电机的相电流检测和保护。
3 软件设计
3.1 软件开发简介
程序开发采用MPLAB®IDE集成开发环境,支持汇编语言、C语言或者混合编程语言的源文件编辑,程序编译、下载时间短,支持产品在线调试。所用的编译器为MPLAB C30编译器,是一个全功能优化的编译器,可将标准的C语言程序编译为dsPIC30F4012可执行的汇编语言代码,同时还支持其他命令进行选项和语言扩展,将其硬件资源进行访问,以便于更好地生产程序代码[4]。
3.2 电机换相软件设计
如图2所示,本文提及的电子换向线路采用三相桥式接法,换流制式为二相导通的三相六状态,换相过程如下,令转子磁极轴线与定子A相绕组的轴线的夹角为θ电角度:
当θ=30°时,Q1、Q6导通,即Vin+→Q1→U→V→Q6→Vin-;
当θ=90°时,Q1、Q2导通,即Vin+→Q1→U→W→Q2→Vin-;
当θ=150°时,Q3、Q2导通,即Vin+→Q3→V→W→Q2→Vin-;
当θ=210°时,Q3、Q4导通,即Vin+→Q3→V→U→Q4→Vin-;
当θ=270°时,Q5、Q4导通,即Vin+→Q5→W→U→Q4→Vin-;
当θ=330°时,Q5、Q6导通,即Vin+→Q5→W→U→Q6→Vin-;
当θ=390°时,重复θ=30°时的状态。
电枢绕组的导通顺序与功率开关管的导通顺序之间的关系可用表1来表示,其中一个周期内每个功率开关管的导通角为120°电角度,一个磁状态所持续的电角度为60°。
根据上述导通方式,并结合霍尔位置传感器的输入信号,对本文所设计的换相设计为数组StateLo
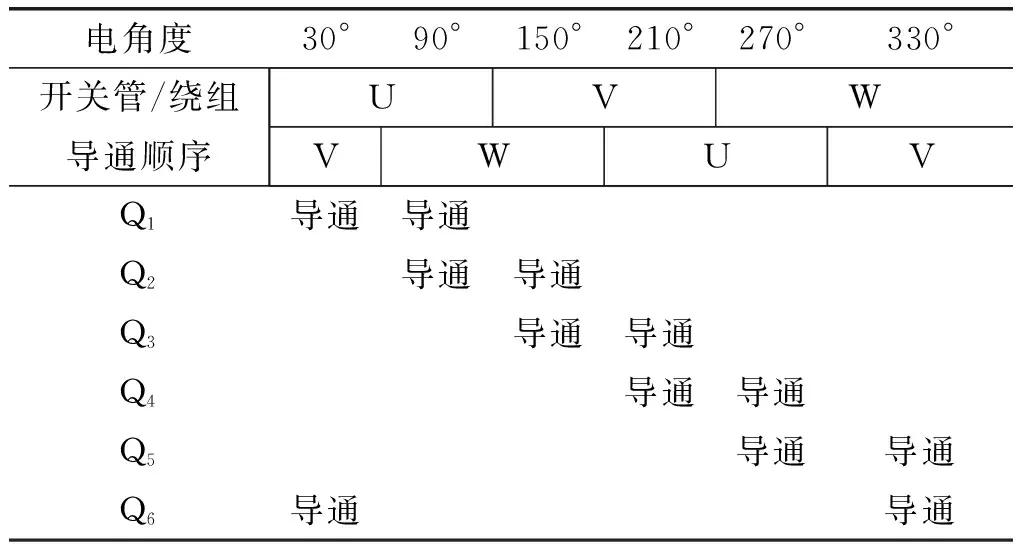
表1二相导通星形三相六状态导通顺序表
TableClk[]={ 0x0000,0x2100,0x0600,0x2400,0x1800,0x0900,0x1200,0x0000},其中状态0和状态7为无效状态。
3.3 程序执行流程
相关程序流程图如图5所示,在程序执行流程中,首先对I/O、CN、ADC等相关参数进行初始化,初始化完成后,对电流传感器参数进行校正,降低硬件电路参数误差对电机相电流采样的误差;电机运行过程中,实时计算电机的转速,将电机的转速与相电流保护进行关联设计,在本文进行了参数及对应关系的设计。使用dsPIC30F4012的定时器功能对运行时间进行计时,保证产品上电运行9 s后自动关闭PWM信号,待系统断电后重新起动运行,即可重新上述运行状态。
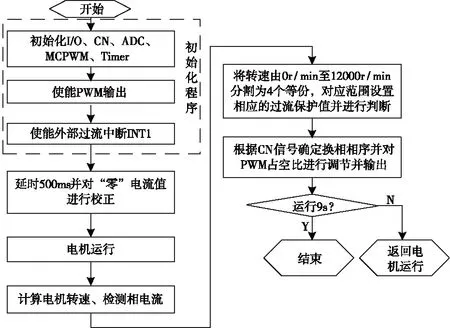
图5 程序执行流程图
4 实验结果
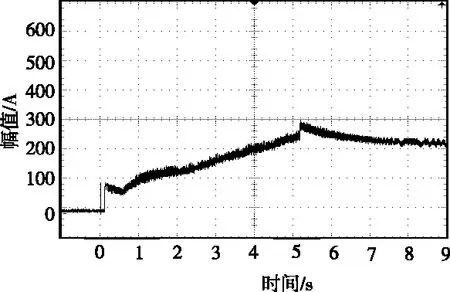
图6 28V供电,额定负载下的母线电流波形
根据图2所示原理框图及上述软件设计算法构建实验平台。在额定负载条件下,输入电压在22 V~30 V范围内变化,输出最大电流及转速如表2所示,电机转速测量采用转速传感器获取。28 V供电,额定负载下的母线电流波形如图6所示。波形采用Tektronix TPS2014B示波器获取。

表2额定负载,不同输入电压下的母线最大电流和转速
表2数据表明,在22 V~30 V供电输入,电机额定负载下,母线电流小于300 A、转速大于8000 r/min;与系统进行联试时,满足系统运行要求。
5 结论
1)根据无刷直流起动电机项目的要求,构建了相应的控制器硬件、软件结构,实现了硬件结构、软件算法的设计。
2)采用了基于数字控制芯片(dsPIC30F4012)的无刷直流电动机相电流截止负反馈的控制算法设计,对硬件、软件设计的关键点进行了论述,并实现了在额定负载下带载运行下的保护功能。
3)实测结果表明:本文设计的无刷直流起动电机控制器能满足供电电压为28 V、额定工作电流不大于400 A、电机转轴防堵转保护的功能。
