基于解析法的变风量空调解耦优化控制
2018-09-18陈大鹏张九根
陈大鹏,张九根,梁 星
1.南京工业大学 电气工程与控制科学学院,南京 211816
2.南京工业大学 建筑智能化研究所,南京 211816
1 引言
近年来,由于电子、制药、化工等行业对产品质量要求的提高,其生产工艺对空气环境也提出了更高的要求[1]。变风量(Variable Air Volume,VAV)空调能够通过调整送风量满足室内实际负荷需求,故有着较佳的节能性[2]。然而其室内温度控制过程具有大时滞性,并且与送风温度回路间存在强耦合关系,两个回路相互干扰,严重影响室内空气环境的质量[3]。因此,消除两支回路间的耦合作用,改善其稳定性与精度,拓展其在高环境质量要求工业场合的应用是当前研究的热点。
目前,针对VAV空调中不同回路间的解耦控制研究已较多,其中一些对常规解耦补偿结构进行了改进,如张会[4]等从预期控制效果出发寻找开环传递函数矩阵,使得解耦矩阵的对角元素为1,从而简化了解耦矩阵;冯增喜[5]等将前馈补偿与无模型自适应控制相结合,加快了收敛速率,缩短了振荡时间。另外一些在解耦控制回路中引入了智能算法,如李界家[6]等构建了模糊神经网络解耦控制器,有效减弱了温湿度回路间的耦合效应,并拓展了其自适应能力;胡钦华[7]等以系统论的观点将VAV系统划分为若干部分,再将单神经元自适应PID控制器融入各部分进行解耦,具有较好的实时控制效果。然而改进补偿结构与引入智能算法分别存在确定参数困难与难以应用于实际的缺陷。
本文在建立室内温度与送风温度耦合数学模型的基础上,利用解析法设计了一个易于物理实现的PID解耦控制器,不仅简化了获取参数的计算过程,还可定量地分析系统的稳定性与鲁棒性。仿真结果表明,该控制器不仅能够消除两支回路间的耦合效应,具备良好的控制性能,还能在模型受到不确定摄动影响时维持较大的鲁棒稳定裕度。
2 VAV空调系统原理与建模
2.1 系统原理
VAV空调通常由VAV Box、AHU及其传输通路、风机盘管与控制回路构建而成[1],图1为两支控制回路结构框图。
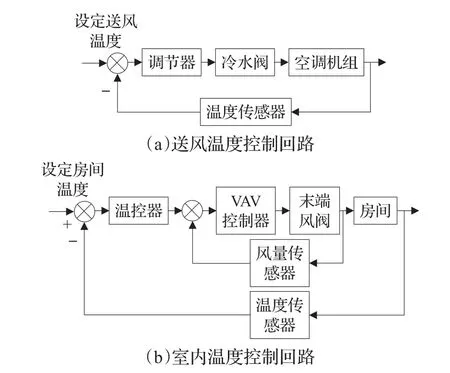
图1 VAV空调控制回路结构图
VAV空调系统在运行期间通过调节送风量并保证送风温度为一常值来改变各区域温度,故而在对室内温度进行稳定而有效地控制同时需要维持送风温度恒定。然而在VAV Box调整送风量来改变房间温度时,区域送风量的变化势必改变总风量,进而通过换热器又会导致送风温度波动,送风温度波动会继续影响房间温度,期间还会不断受到外界环境影响。
2.2 送风温度控制回路
根据换热器能量守恒关系[8]可得:

式(1)中,mc为换热器质量(kg);Cc,Ca,Cw分别为换热器、空气、冷冻水的定压比热容(kJ/(kg⋅℃));tc为换热器表面温度(℃);Gs为送风流量(kg/s);Gw为冷冻水流量(kg/s);tc,in,tc,out分别为换热器进风与出风温度(℃);tw,in,tw,out分别为换热器进水温度与出水温度(℃)。
换热器进风温度可表示为:

式(2)中,Gs,f,Gs,r分别为新风与回风流量(m3/s);tc,f,tc,r分别为新风与回风温度(℃);此处假设换热器出风温度与其表面一致,即tc,out=tc。
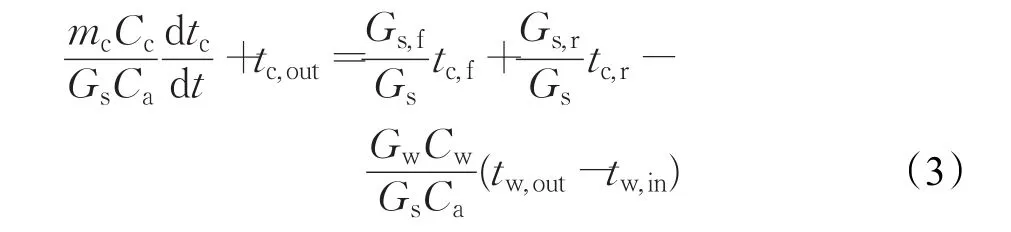
将式(2)代入式(1)中可得:通过式(3)可得tc,out与Gw间的传函为:

由于tc,out与Gs之间的关系呈非线性,故利用Taylor展开法在工作点处对其作近似线性化处理,得到其传函为:

2.3 室内温度控制回路
根据室内热平衡方程[4]可得温度模型如式(6)所示:

式(6)中,V 为房间体积(m3);tr为室内温度(℃);ρa为空气密度(kg/m3);qr为室内热源的散热量(kJ/s);R为房间维护结构的热阻(kW/℃);to为室外温度(℃)。式(6)经整理后可简化为式(7):



tr与Gs之间的传函由两个子项构成,第一个子项可以在工作点附近利用Taylor展开法得到,即

第二个子项为:

因此tr与Gs之间总的传函为:

在以上机理分析结果的基础上,利用南京工业大学建筑智能化研究所内VAV空调系统实验平台进行阶跃响应测试。表1给出了物理参数,表2为系统在夏季工况下稳定运行期间所测变量数据,结合表1的物理参数,最终获得耦合对象的传函模型矩阵如式(13)所示:
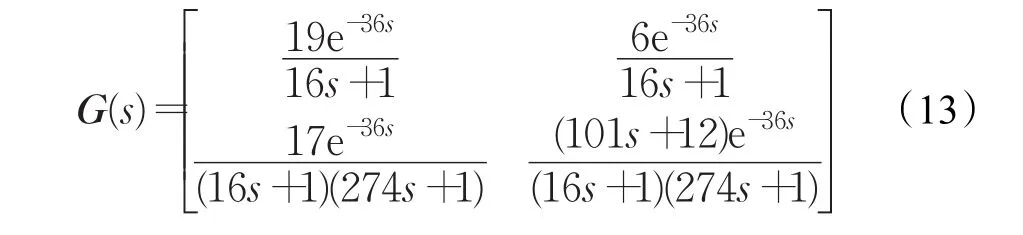
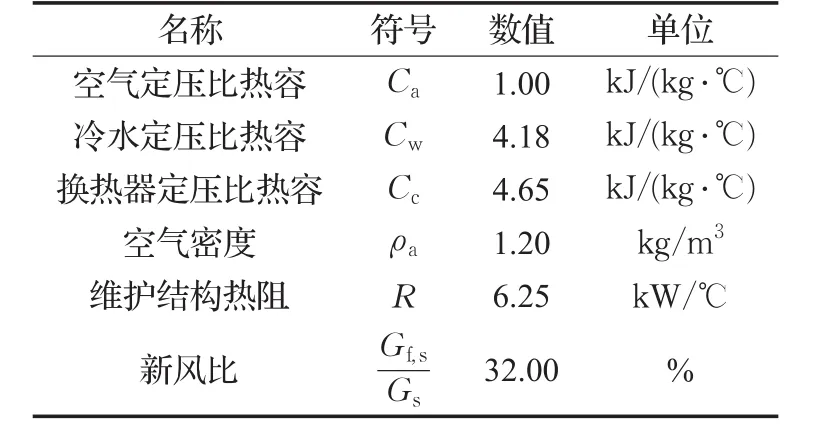
表1 物理参数
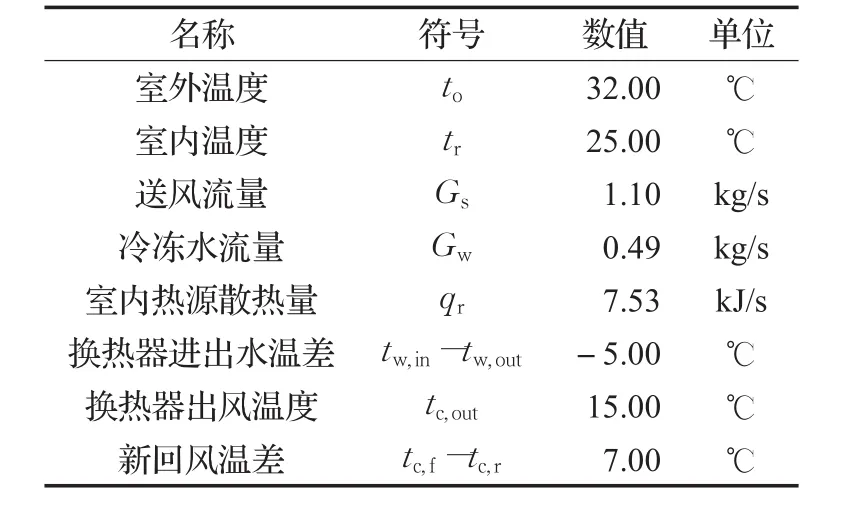
表2 夏季工况下实验测得数据
3 解耦设计分析
为了解决上章所述VAV空调中室内温度与送风温度两支回路间的耦合问题,利用解析法定量地对其进行解耦控制设计,其结构如图2所示。
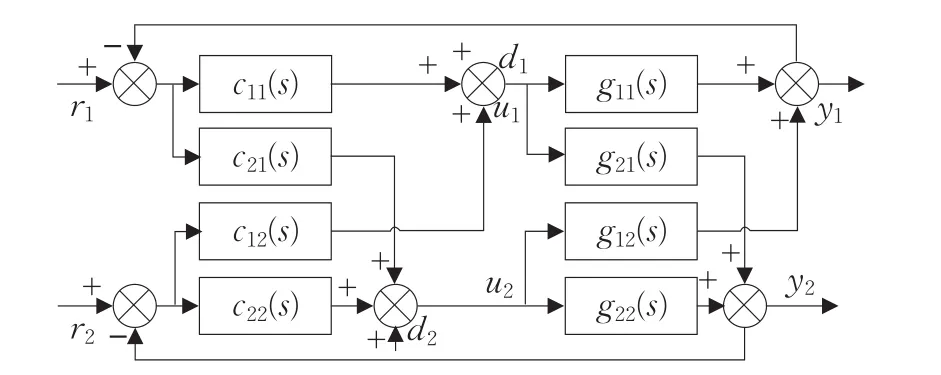
图2 解析解耦控制结构图

若将G-1(s)与C(s)表述为一个对角阵与一个非对角阵相加的形式,即
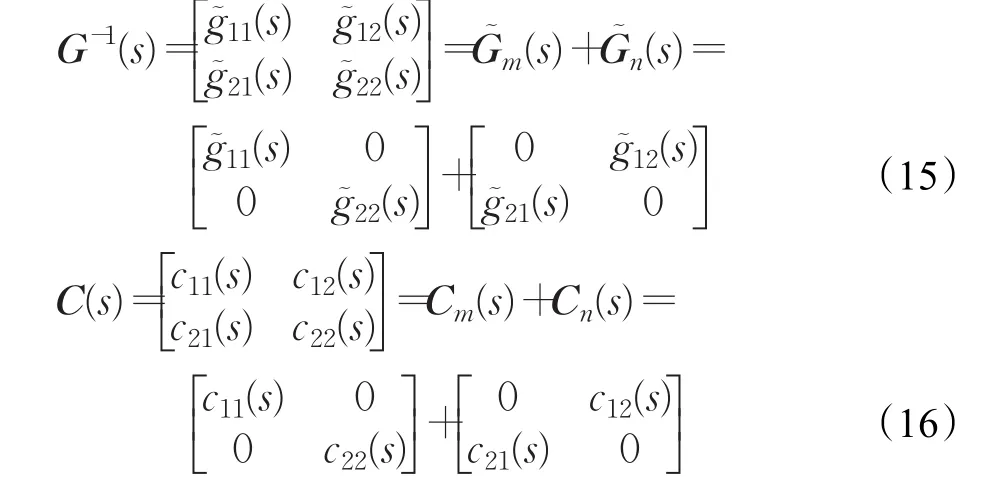
再将式(15)与(16)代入式(14)可得:

从式(17)可以看出,通过H1(s)已经能够无耦合地分别控制两支回路,而H2(s)中却仍然包含一个带有耦合性质的乘积矩阵,如果令
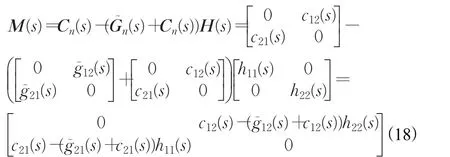
显然仅通过M(s)就能够反映出两支回路间的耦合情况,而若要实现输出响应完全解耦,则只需令M(s)为0即可,进而可以解得:
再将式(19)与(20)代入 H1(s)中能够得到式(21):
从式(21)可以看出,若已能够确定解耦之后所期望得到的对角闭环传函阵H(s),即h11(s)与h22(s)已知,则可以反求出c11(s)与c22(s)分别如式(22)与(23)所示:
由此,最终可以用式(24)来表述解耦控制器矩阵。
4 解耦控制器设计
4.1 构建期望对角闭环传函阵
由于直接对包含大时滞环节的传函阵G(s)求逆会令计算过程尤为复杂,因此通过建立式(25)可以简化表述 G-1(s)中各元素

式(26)中:
xk(k=1,2,…,l)为分布在复右半平面的极点,l为极点总数,r为各极点的重数,q为低通滤波器的阶次,通常一阶滤波器相对而言是反馈滤波器中性能最佳的[9],φj为滤波器时间常数,是唯一附加的调节变量,用以改变输出响应的追踪速率,同时也能够反映出鲁棒稳定性与动态性能间的折中特性。
4.2 确定参数形式
将上节中构建的期望传函阵H(s)以及通过简化计算后得到的 G-1(s)中各元素代入式(24)中,能够得到理想的解耦控制器矩阵的待定系数形式如式(27)所示:
显然式(27)所描述的控制器矩阵中同时含有高阶有理项与大延迟项,几乎无法应用于实际过程中,故可以考虑对其做逼近处理将其转换成PID形式。首先利用劳斯降阶[10]将cij中高阶有理项转换为一阶惯性环节:

再通过一阶帕德近似[11]消除大延迟项,即

在连续时间域中,常规PID控制器的算法[12]如式(30)所示:

式(31)中,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,Tf为低通滤波器时间常数。结合式(28)~(30)可以确定解耦控制器矩阵的PID形式如式(31)所示:
4.3 整定参数
在设计解耦控制器时必须着重考虑参数获取过程中系统的稳定性与鲁棒稳定性,并以此为前提进一步考虑其他动态响应性能,而在采用解析法时只需要改变一个调节变量,故而可以简化获取过程。
4.3.1 稳定性
由于待解耦回路的闭环传函阵中包含多个延迟环节,若依据其极点分布位置来判断稳定性会尤为复杂,因此将图2所示控制结构进行转换后如图3所示。

图3 等价控制结构
经过化简后可得:

则在整定参数过程中根据文献[13],若要使含有大延迟环节的双入双出PID单位反馈系统维持稳定,只需要满足以下两个条件:
(1)式(32)中每一个传函的极点都分布于复左半平面。
4.3.2 鲁棒稳定性
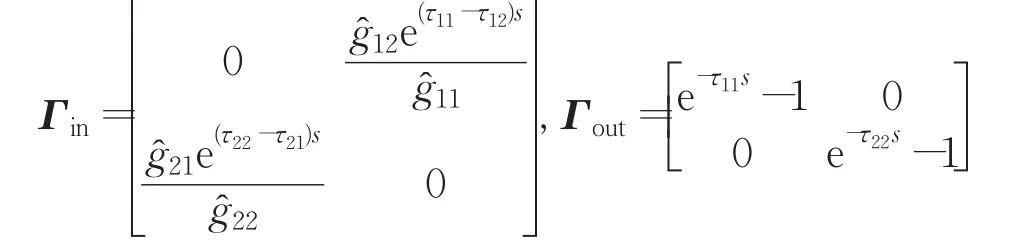
若δin与δout分别代表输入与输出不确定性,同样将包含δin与δout的控制系统按图3所示结构进行等价转换,简化后则可以得到带有输入与输出不确定性的闭环传函阵Fin与Fout,即:

则根据文献[14],该系统是否维持鲁棒稳定性可以通过观察其谱半径是否比1小来得知,即:

4.3.3 整定过程
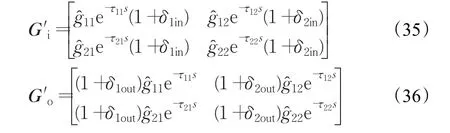
当模型中没有出现摄动时,可以通过传统的Z-N法来整定控制器参数。而当模型中出现不确定摄动时,由于M(s)≠0,则输出响应也无法用式(26)表述,因此考虑如式(35)与(36)所示较为普遍的带有乘性输入、输出不确定摄动的对象传函阵。
其中,δtin,δtout(t=1,2)分别为输入与输出不确定摄动,再将式(37)与(38)分别代入M(s)中可以获得其各元素为:
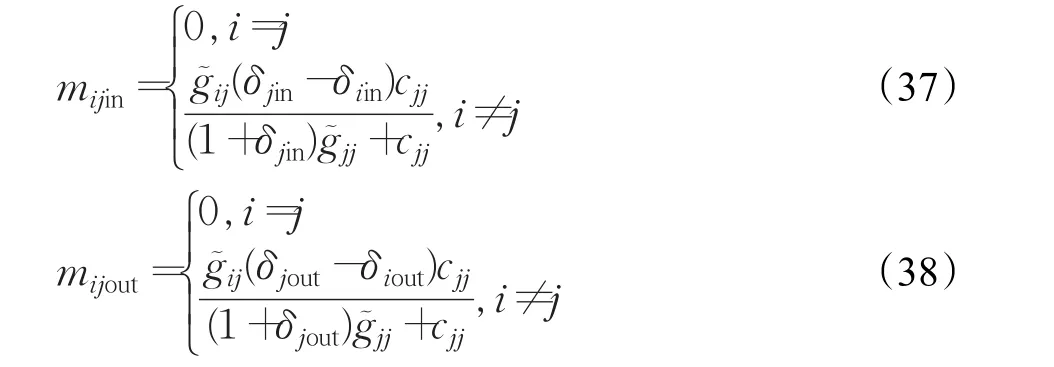
显然,只有当 δ1in=δ2in或δ1out=δ2out时,M(s)=0。
具体步骤如下:
步骤1将调节变量φj的初始值设定在τjj附近。
步骤2依据实测输出响应在线地调节φj从而获取期望的追踪响应速率,即减小或增大φj来相应地提升或降低第 j个系统的输出响应速率。
步骤3若符合稳定性要求则结束整定过程,否则须继续在线增大φj直至系统稳定。
步骤4在以上所得结果基础上,当对象模型中出现不确定摄动时,可继续在线单调增大φj以确保系统能够维持鲁棒稳定性。
5 仿真研究
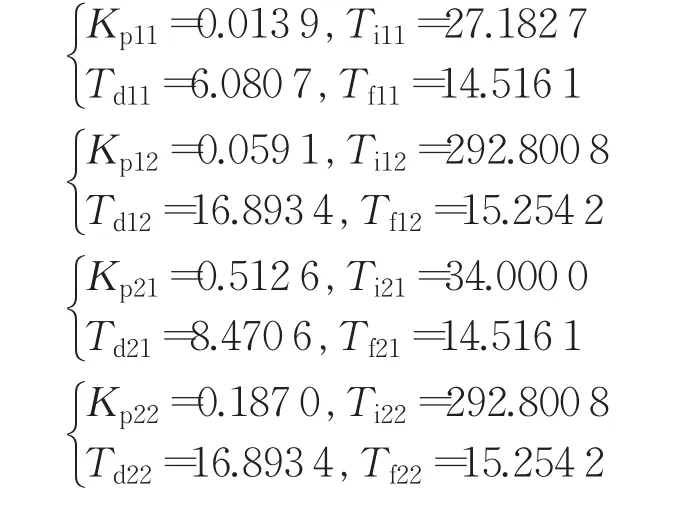
目前,在实际工程中仍然普遍采用基于PID的前馈补偿解耦控制策略[15],为了获得与其相接近的追踪响应速率,分别取调节变量φ1=150,φ2=200。依据推导出的对象模型式(13),先利用式(25)、(26)分别获得模型逆矩阵G-1(s)以及广义对象矩阵H(s),再通过式(27)推导出解耦控制器矩阵的理想表述形式,最后经过式(28)~(31)转换获得其PID参数如下:
为了尽可能减少运行能耗,送风温度设定值会根据室内实际热负荷需求来调整,因此在仿真过程中,12 000 s时送风温度设定值将由12℃上调至16℃,而在16 000 s时下调回12℃。此外,由于室内人员对舒适性要求的变化,房间温度设定值也会随之调整,因此在设定值,虽然其调节时间略长一些,但是输出响应几乎无超调量,稳定性较佳。

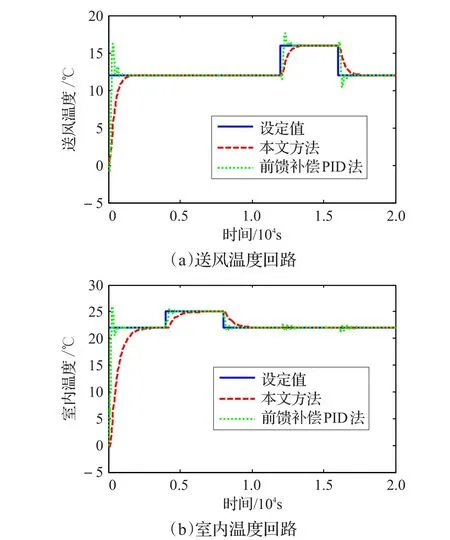
图4 标称系统控制效果图
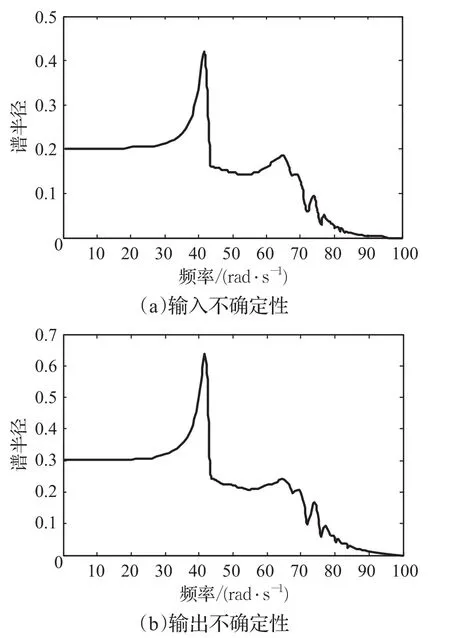
图5 不确定系统谱半径幅频曲线
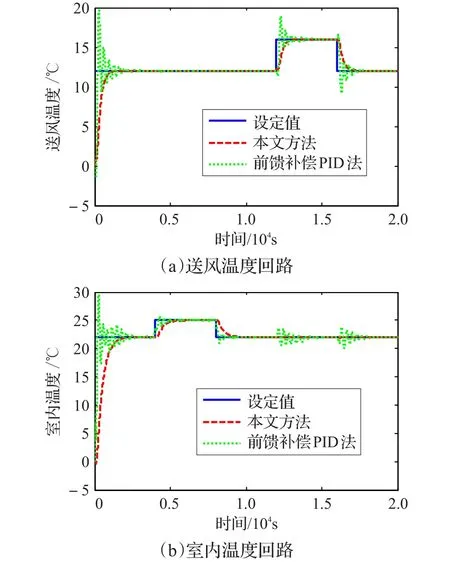
图6 输入不确定系统控制效果图
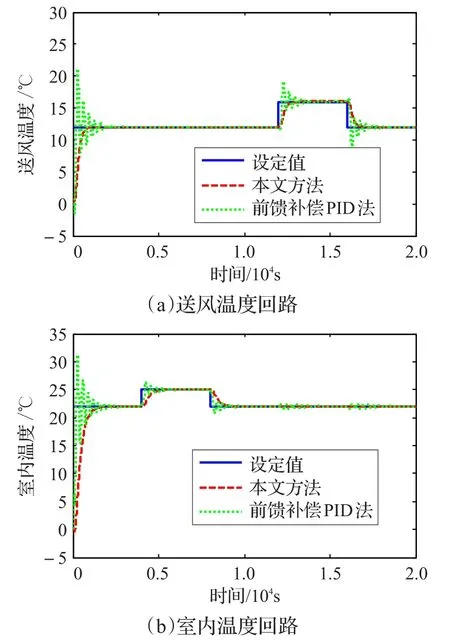
图7 输出不确定系统控制效果图
可以看出,前馈补偿PID法并不能完全消除两支回路间的耦合效应,当送风温度设定值发生变化时,室内温度也会产生一定波动。通过解析法设计的控制器兼具解耦和控制两项功能,不仅能够完全实现两支回路的独立控制,还能在设定值发生阶跃变化时更平稳地趋于
可以看出,在对象模型受到不确定摄动影响时,采用本文方法系统的谱半径幅频曲线仍小于1,并且鲁棒稳定裕度较大,同时跟踪响应依然能够保持平稳,而采用前馈补偿PID法却会使系统超调量增大,振荡时间变长,同时解耦效果也会明显下降。
6 结束语
VAV空调中控制回路存在耦合性强、延迟时间大、易出现不确定摄动等问题,严重制约其在电子、制药等工业生产场合的应用。利用解析法定量地设计PID解耦控制器,通过改变唯一的调节变量获取良好的输出响应性能,并依据谱半径幅频曲线评判系统的稳定性与鲁棒稳定性,相比于前馈补偿PID解耦更容易获得理想的控制器参数。仿真结果显示,该方法能够完全消除两支回路间的耦合特性,提高了控制质量,尤其是当模型中出现不确定摄动时,依然能够维持较大的鲁棒稳定裕度与较好的跟踪性能。
