救援运载车自主制动控制研究
2018-09-18梁秀春
梁秀春
(山西煤炭进出口集团左权宏远煤业有限公司, 山西 左权 032600)
引言
随着国家煤炭能源的大力开发,煤矿救援运载车被广泛应用于运输救援机器人,其整车制动系统的自动化和智能化是安全、高效救援的直接影响因素[1]。目前,运载车存在自动化制动技术应用范围较窄、智能化控制效果较差等问题,在行驶过程中很难达到较好的制动效果,影响着整车的行驶安全[2]。因此开展基于模糊算法救援运载车智能化制动仿真研究尤为重要。
1 模糊控制理论
模糊逻辑是一种模拟人类推理过程的计算机推理设计要求,可通过与人类语言相近的语言变量进行模糊推理,可读性较高,易于理解,具有以下特点[3]:其一,控制简单方便、易于掌握,是一种比较理想的非线性语言控制器;其二,抗干扰能力强,响应速度快,并对系统参数的变化有较强的鲁棒性;其三,不需要建立精确的数学模型,易于实现控制不确定性系统的控制。其基本原理如图1所示。
2 自主制动模糊控制器设计
2.1 隶属度函数的选择
在Matlab中键人命令fuzzy,进入模糊逻辑控制箱。建立A,D,U的隶属度函数,有三角形、高斯形、梯形等11种可供选择,本文选取常用的三角形(trimf)隶属度函数[4]。建立的输入量输出量隶属度函数如图2所示。
2.2 模糊控制规则的建立
模糊控制规则的条件语言为:IF=i,AND=j,THEN=k[5],根据运载车可能遇到的障碍物情况,确定了救援车4X5=20条控制规则,其详细规则如下页表1所示。

图1 模糊控制基本原理

图2 输入量和输出量隶属度函数示意图
2.3 模糊化求解
由于前文确定的隶属度函数形状为三角形,为提高求解的合理性和精确性,选用重心求解法[6],利用Matlab模糊逻辑工具箱,生成了输入输出三维关系曲面,如图3所示。
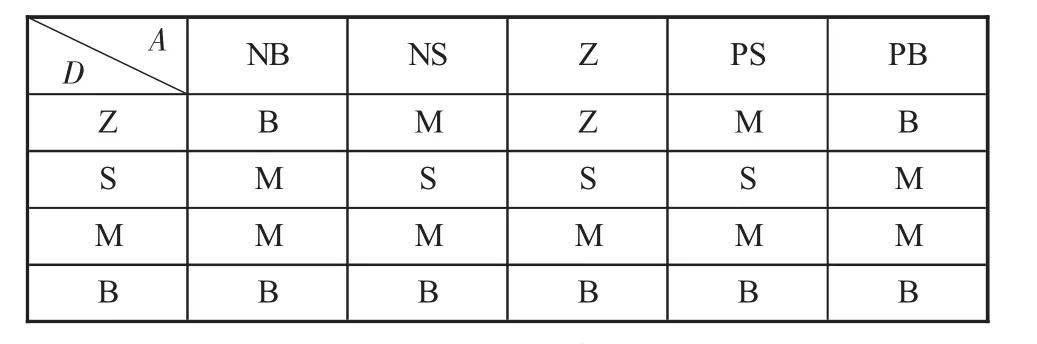
表1 模糊控制规则表
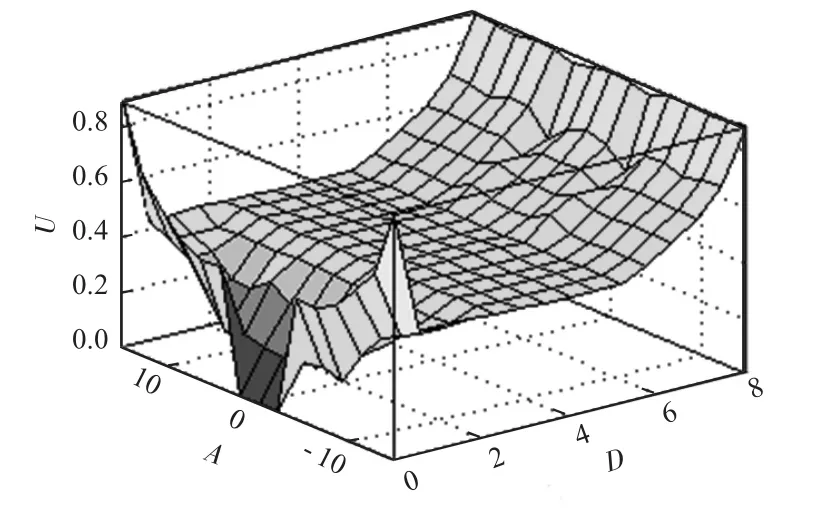
图3 输入输出关系曲线图
3 智能制动控制系统建模及仿真
3.1 智能制动仿真模型建立
采用MATLAB/Simulink软件建立了基于模糊算法的煤矿救援车智能制动的仿真模型,该模型能自主制动运行速度和制动强度的大小,以此来验证模糊控制规则的设计对救援运载车自主制动的适用性和有效性,智能制动仿真模型如图4所示。

图4 智能制动仿真模型仿真模型
3.2 障碍物在行驶轨道上时仿真结果
救援运载车进入弯道行驶时,障碍物在行驶轨道上,仿真结果如图5、图6所示。
由图分析可知,运载车发现障碍物时,通过产生的PWM脉宽调制信号来控制电磁铁两端电压,由此实现运载车的制动控制,降低运载车行驶速度。运载车在1.2~3 s时,整车匀速行驶,此时PWM控制信号输出为0。当障碍物与运载车距离达到危险距离,此时障碍物与运载车角度为0°,系统发出紧急制动指令,控制电压信号脉宽达到最大,运载车减速停车,从而避免运载车与障碍物相撞。
3.3 障碍物在行驶轨道侧边时仿真结果
救援运载车进入弯道行驶时,障碍物在行驶轨道侧边,仿真结果如图7、图8所示。
由图7分析可知,救援运载车以2 m/s速度行驶一段时间后,距离逐渐缩短,由于模糊控制器设计的距离权重比较大,因此,运载车开始缓慢制动,速度逐渐降低。当经过障碍物后,又加速到制动前的初速度4 m/s。由图8分析可知,此过程中有两段制动时间,匀速和加速时没有PWM信号输出。
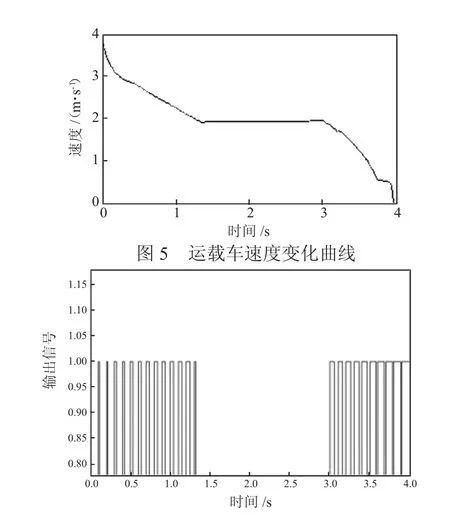
图6PWM控制信号输出

图7 速度变化曲线

图8 脉冲宽度调制(PWM)信号曲线
4 结语
运载车智能制动系统能对救援运载车进行稳定、准确、灵活控制,当障碍物在行驶轨道上或在轨道侧边时,可对运载车与障碍物距离进行准确判断,通过发出不同脉宽的PWM控制信号,达到对运载车行驶速度和制动强度的控制,实现煤矿救援运载车制动的无人化、智能化。该主动制动模糊控制器设计合理,能够满足运载车智能自主制动的要求。该控制系统的设计增加了运载车自动制动效果,提高了整车的行驶安全,对提高现场救援效率具有重要意义。
