农用柔性底盘模式切换控制参数试验与优化
2018-09-17瞿济伟郭康权李翊宁宋树杰
瞿济伟 郭康权,2 李翊宁 宋树杰 高 华 周 伟
(1.西北农林科技大学机械与电子工程学院, 陕西杨凌 712100; 2.陕西省农业装备工程技术研究中心, 陕西杨凌 712100; 3.陕西师范大学食品工程与营养科学学院, 西安 710119)
0 引言
我国温室、农产品仓储及果园等农业作业环境,空间狭闭且环境复杂,机械作业要求较高,目前机械化水平急需提升,发展灵活、环保、高效与智能化的农机是提升其机械化作业水平的关键[1-3]。
目前,应用于上述狭闭及复杂作业环境的农业机械主要包括农用电动车[4]、轮式机器人[5-7]及各种形式的移动平台或者底盘[8-9]等。在国内,文献[10]研究的线控四轮独立驱动与转向轮式移动小车,转向形式多且智能程度很高,但转向系统与驱动系统仍分离,控制难度较大;文献[11]研发的温室电动自走式收获机虽在狭闭空间有很高的作业质量和效率,但沿固定轨道行驶使其对作业环境要求较高;文献[12]通过有限元模态分析方法较大地轻简化了山地果园运输机,但传统拖拉机底盘结构对运动形式有所限制。国外对于狭闭空间农业机械研究较早,且注重运动控制算法的开发和路径规划设计等[13-15],但研究仍主要采用内燃机动力及机械液压转向或机电液转向系统[16],环保与灵活性受到一定限制。
课题组前期研究的四轮独立驱动与转向电动农用柔性底盘将驱动与转向系统合二为一,更加简化了结构,可在温室等狭闭环境实现直行、横行、斜行及原地回转等特殊运动模式[17],兼具低碳环保和灵活优势。然而,课题组前期主要设计了样机及其控制系统[18],并研究了固定姿势时的动力学特性[19],特殊模式下的控制性能仍需探索,本文在前期研制的柔性底盘样机及试验台[20]基础上,针对轮毂电机驱动轮和电磁摩擦锁的控制参数进行试验,探索各参数对模式切换受力稳定性及切换精度的影响,以期优化特殊模式切换的效果,为农用柔性底盘推广应用提供保障。
1 结构特点与工作原理
柔性底盘整体结构如图1所示,其主要由4个偏置转向轴结构组成,该结构包括偏置轴、电磁摩擦锁、偏置臂以及轮毂电机驱动轮等。底盘的各种运动,通过中央控制器对电磁摩擦锁锁紧力矩控制电压(简称锁紧电压)和轮毂电机驱动轮转速的调节来实现;若将锁紧电压控制为24 V额定电压,则驱动轮加速时不能绕偏置轴转动,底盘只能以固定运动形式行进或工作;若锁紧电压降低或为0,则驱动轮加速时能绕偏置轴转动,便可实现转弯或各种特殊模式运动的切换。本文针对特殊模式运动展开研究。

图1 柔性底盘整体结构简图Fig.1 Schematic of overall structure for flexible chassis1.中央控制器 2.蓄电池 3.偏置轴 4.电磁摩擦锁 5.偏置臂 6.轮毂电机驱动轮
柔性底盘模式切换的控制原理及示意图如图2所示。图中R1、R2、R3、R4为位于电桥桥臂上的精密多圈电位器。
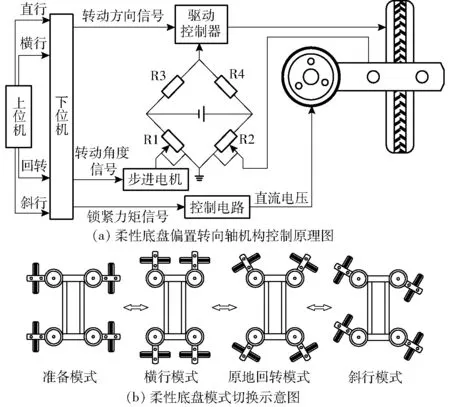
图2 柔性底盘转向控制原理简图及模式切换示意图Fig.2 Diagram of steering control system and schematic of mode switching for flexible chassis
当底盘为图2b准备模式时,电磁摩擦锁在额定直流电压下锁紧,驱动轮不能绕偏置轴转动。如图2a所示,当上位机发出模式切换指令后,下位机发出锁紧力矩信号使锁紧电压降低,并由转动方向信号控制轮毂电机正反转,然后转动角度信号发出,转向电桥[21]步进电机以一定转速开始转动,使驱动轮跟踪转向直至目标角度,实现图2b的各种运动模式,可见模式切换实质上由锁紧电压与步进电机转速控制。因此,需明确二者对模式切换的影响并进行参数综合寻优,以保证良好的模式切换效果。横行、原地回转是柔性底盘两种主要特殊工作模式,且斜行及软化路面情况十分复杂,后续将单独研究,故本文只针对硬化路面上横行和原地回转两种模式进行研究。
2 模式切换过程控制参数分析
2.1 电磁摩擦锁锁紧电压
电磁摩擦锁锁紧电压U为0~24 V,且其锁紧力矩MZ与U之间关系为[19]
MZ=KU
(1)
式中K——常数
试验发现,采用电桥跟踪转向时,U若高于8 V则偏置臂因MZ太大而转不到目标位置,若低于2 V则因MZ太小使转角有较大超调量。可见,为保持较好的偏置臂转向精度,U需在2~8 V之间。
2.2 转向电桥步进电机转速
由于轮毂电机启动需一定时间t0,步进电机转速n若低于15 r/min,则电桥输出电压变化太慢,轮毂电机出现一走一停现象,若高于180 r/min则步进电机转到位后轮毂电机还未启动,因此n需在15~180 r/min内。已知电桥输入电压Ue和输出电压Us之间关系为[19]
(2)
由于t0时间内α一直为零,即θ=2×180°nt0,依据电桥原理及式(2),可得t0时间内因步进电机转动造成的电桥输出电压Us0为
(3)
式中θ——图2a中电位器R1转角即步进电机转角,(°)
α——偏置臂处电位器R2转角,(°)
因信号电压与轮毂电机转矩Te呈线性比例关系[19],即Te=PUs0。由式(3)知步进电机转速越大,轮毂电机转动初始时刻控制信号电压越大,则轮毂电机驱动转矩也越大,且轮毂电机驱动力Fl与Te关系为[22]
(4)
式中P——常数
Mfl——各轮所受阻力矩,假设各轮Mfl相等且为常值
下角l为1、2、3、4,分别代表左前轮、右前轮、左后轮及右后轮。
另外,单轮及整机受力分析如图3所示,以底盘几何中心为原点O建立车辆坐标系XOY;各轮胎驱动力F沿X、Y两个方向分解为Flx与Fly,轮胎驱动力转移到偏置轴处后(图3a),各偏置轴处所受转矩为Ml(图3b)。底盘所受纵向合力FX、横向合力FY、转矩MO分别为
(5)
(6)
(7)
式中δl——各偏置臂转角,(°)
L——车架纵向长度,m
B——车架横向长度,m
同时结合式(4)可知底盘模式切换的受力稳定性受步进电机转速影响。

图3 柔性底盘受力示意图Fig.3 Force diagrams of flexible chassis
综上可知,柔性底盘模式切换时偏置臂转向精度和受力稳定性受锁紧电压和步进电机转速影响;为提升转向精度及稳定性,需通过试验探明二者对转向精度及稳定性的影响,并对锁紧电压和转速进行优化匹配。
3 试验方案
3.1 测试装置及仪器设备
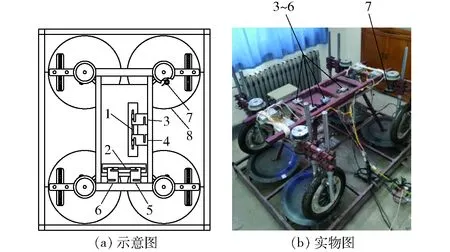
图4 柔性底盘试验台示意图及实物图Fig.4 Schematic and object of flexible chassis test bench1.限位槽a 2.限位槽b 3~6.力传感器 7.精密多圈电位器 8.水平转盘
采用自制柔性底盘整机试验台进行试验,柔性底盘与试验台的示意图及实物如图4所示。所用仪器设备有:TJL-1型力传感器(蚌埠天光传感器公司,0~500 N)、22HP-10型精密多圈电位器(日本SAKAE公司,0~5 kΩ)、USB2852型数据采集卡(北京阿尔泰科技公司)、610H型研华工控机(研华科技公司)。
如图4a所示,柔性底盘各偏置轴处分别装一精密多圈电位器以测量偏置臂转角;4个力传感器一端固定于车架,另一端插入固定于试验台架的限位槽1、2中,3、4与5、6分别检测底盘横向和纵向受力情况;4个水平转盘分别支撑4个电动轮。
3.2 试验设计
试验选取电磁摩擦锁锁紧电压(2~8 V)与转向电桥步进电机转速(15~180 r/min)为试验因素,以底盘整机所受纵向力、横向力、中心O所受转矩以及各偏置臂的最大转角误差为试验指标,采用二元二次通用旋转组合试验设计,探明各因素对模式切换综合效果影响,同时建立因素与综合指标间的回归方程,并进行控制参数综合寻优。试验因素编码表如表1所示。
3.3 试验方法
如图4b所示,通过水平转盘的转动可模拟柔性底盘的路面行驶状态,但因模式切换是在原地进行,故将水平转盘通过其下方制动盘制动,以使水平盘相对于地面静止。试验初始时刻,开启数据采集系统,底盘处于准备模式,启动模式切换程序后,步进电机便在控制器命令下完成转动,使偏置转向轴机构完成转向跟踪动作,底盘完成横行、原地回转的切换。4个力传感器检测底盘受力情况,4个转角传感器分别检测各偏置臂的转角。中心O的转矩根据力传感器值及O到各力方向的垂直距离计算。试验完毕停止保存,恢复到准备模式后进行下一次试验。
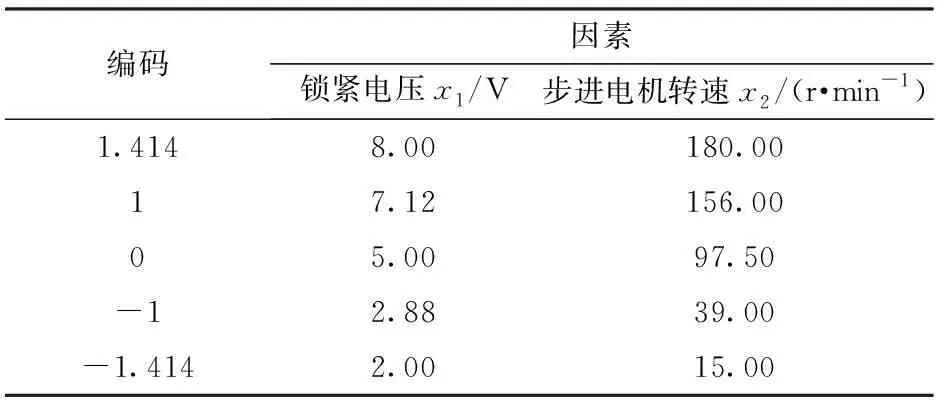
表1 试验因素与编码Tab.1 Experimental factors and codes
4 结果与分析
试验设计及结果如表2所示,X1、X2为因素编码值。共13组试验,每组试验重复5次取平均值,横行与原地回转切换时纵向力、横向力、转矩、转角误差4个指标分别记为yq、Yq(q=1,2,3,4)。
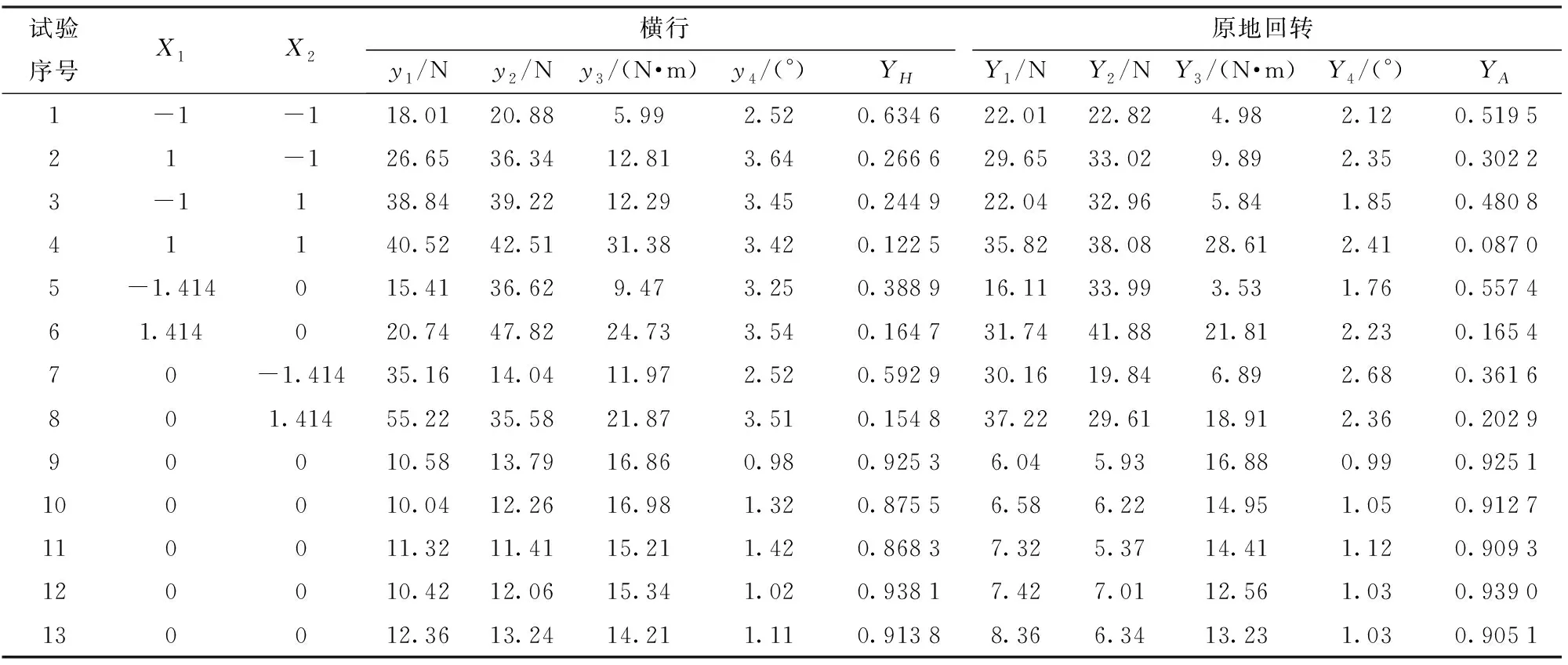
表2 二元二次旋转组合试验设计及结果Tab.2 Binary quadratic rotation combination test design and results
4.1 模式切换综合效果熵值法评价
因本试验评价指标较多,故采用较为客观的熵值法[23],将2种模式各指标构建成综合评判指标,分别记为YH、YA。本文有n(n=13)组试验m(m=4)个指标,用λij表示第i组试验第j个指标值(i为1,2,…,n;j为1,2,…,m),即纵向力、横向力、转矩、转角误差的试验值。
各指标值越小则模式切换效果越好,故用负向指标公式进行标准化[23],标准化值为
(8)
各指标权重为
(9)
第j项指标的熵值为
(10)
第j项指标的信息熵冗余度为
dj=1-ej
(11)
第j项指标的权重为
(12)
模式切换效果的综合评价指标值为
(13)
通过式(13)得出横行切换与原地回转切换效果综合评价指标值即为表2中YH、YA。
4.2 综合评价指标回归模型及响应面分析
4.2.1综合评价指标回归模型
用Design-Expert 8.0将表2中综合评价指标YH、YA值进行回归,得到横行切换和原地回转切换的回归方程分别为

(14)

(15)
通过F检验的方法得到回归模型的方差分析如表3所示,横行切换与原地回转切换的回归模型均极显著(P<0.01),失拟项均不显著(P>0.05),且综合指标回归模型的决定系数分别为0.993 6和0.997 8,可见模型拟合程度较高;两回归方程各项系数均显著(P<0.05),表明模型合理;另外,锁紧电压与转速及其交互作用对模式切换效果均有极显著影响(P<0.01)。
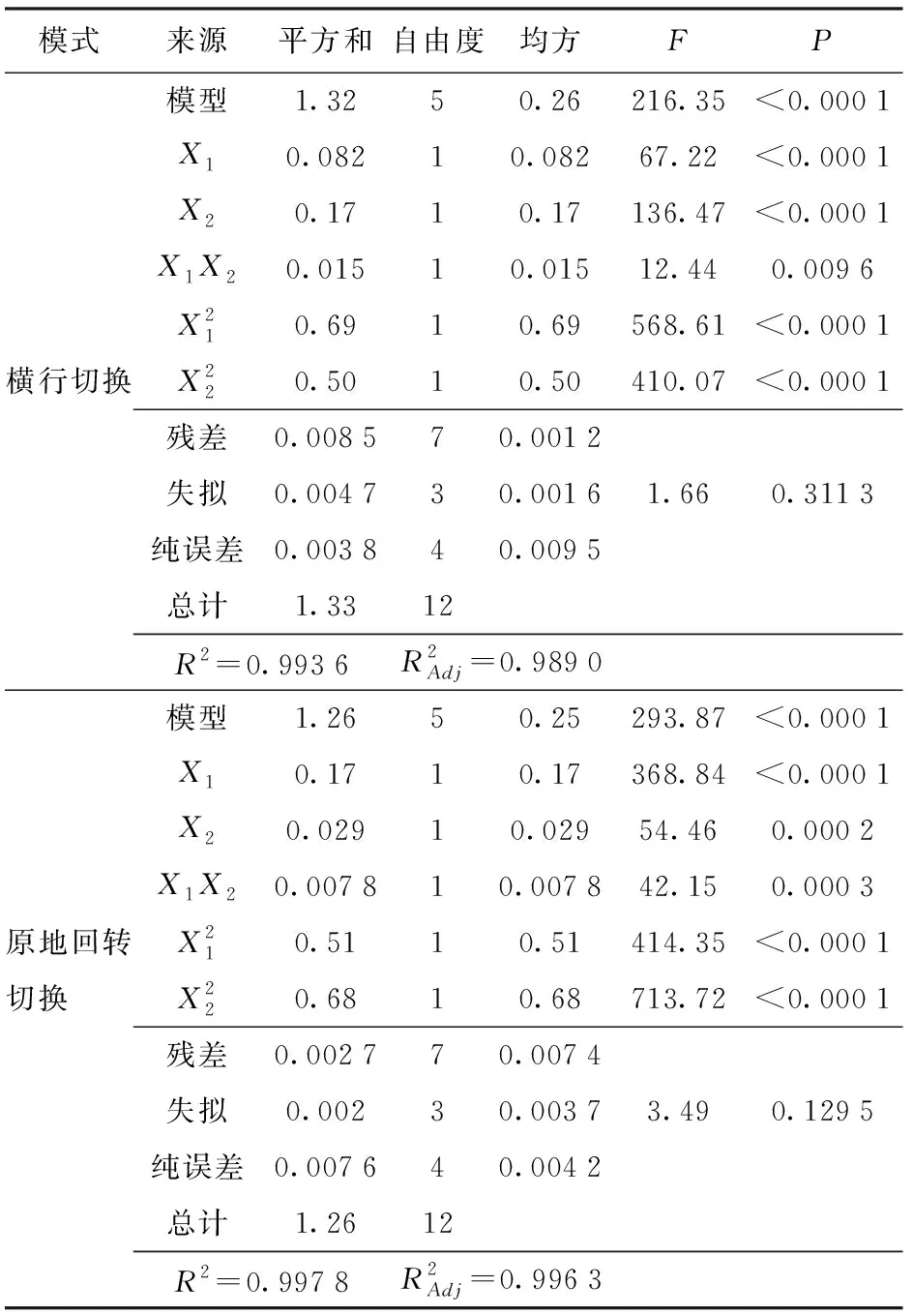
表3 综合评价指标回归模型方差分析Tab.3 Variance analysis for regression model of comprehensive evaluation index
4.2.2模式切换效果响应面分析
利用Design-Expert 8.0得到模式切换综合评价指标关于锁紧电压与步进电机转速的响应曲面及等高线图如图5、6所示。由图5a可得,随着锁紧电压与转速的增大,在一定范围内响应值均呈现先增大后减小的趋势;由图5b可得,响应面的峰值处于试验因素取值范围内,且在电压4~5 V,转速70~100 r/min内时,横行模式切换效果最佳。

图5 锁紧电压与转速对横行切换效果影响的响应曲面及等高线图Fig.5 Response surface and contour plots of locking voltage and speed influence on cross switching effect
图6a显示的原地回转模式切换效果响应曲面亦为凸形,由图6可看出,试验范围内锁紧电压引起的响应值变化幅度大于步进电机转速,图6b表明响应面的峰值在电压3.5~4.5 V,转速80~110 r/min内。图5与图6响应面皆为凸形是由于锁紧电压过低或过高,使电磁摩擦锁锁紧力矩过小或过大,使转向精度变差造成的,同样,当步进电机转速过低或过高,将使底盘受力波动增加,稳定性下降,这与上述第2节模式切换过程的分析一致。

图6 锁紧电压与转速对原地回转切换效果影响的响应曲面及等高线图Fig.6 Response surface and contour plots of locking voltage and speed influence on in-place rotation switching effect
4.3 控制参数优化及试验验证
利用Design-Expert的优化求解功能,以综合评价指标回归方程(14)与(15)为目标函数,以2个因素的试验范围为边界约束条件,即在步进电机转速15~180 r/min、驱动电压2~8 V内进行优化求解,从而得到2种模式切换时,最优的步进电机转速以及电磁摩擦锁锁紧电压:横行为81 r/min、4.60 V;原地回转为91 r/min、4.41 V。
在上述优化组合条件下进行验证试验,检测切换时底盘纵向力、横向力、转矩及转角误差,每组试验重复5次取均值,然后转换为综合评价指标,得到试验结果如表4所示,计算值与试验值最大相对误差为4.73%,可见获取的最优步进电机转速及电磁摩擦锁锁紧电压是合理的。

表4 最优组合下综合评价模型计算值与试验值Tab.4 Calculations of comprehensive evaluation model and experimental values under optimal combination
5 结论
(1)通过理论分析得出了影响柔性底盘模式切换的关键因素为转向电桥步进电机转速与电磁摩擦锁锁紧电压,并应用熵值法构建了转速与电压对模式切换效果影响的综合评价指标,采用二元二次通用旋转组合试验,得出了底盘横行与原地回转切换时综合评价指标关于两个因素的回归模型,且均极显著(P<0.01)。
(2)响应面试验优化结果表明,柔性底盘横行与原地回转切换时的最优转向电桥步进电机转速与电磁摩擦锁锁紧电压分别为81 r/min、4.60 V和91 r/min、4.41 V。
(3)试验验证表明,横行与原地回转模式切换最优控制参数的模型理论值与试验值最大相对误差为4.73%,最优参数合理,可为农用柔性底盘运动控制及推广应用提供参考。