移动测量系统的GNSS/INS组合定位方法的对比研究
2018-09-14李照永
张 迪,施 昆,李照永
移动测量系统的GNSS/INS组合定位方法的对比研究
张 迪1,施 昆1,李照永2
(1. 昆明理工大学 国土资源工程学院,云南 昆明 650093;2. 昆明市城市地下空间规划管理办公室,云南 昆明 650011)
文章以移动测量系统的GNSS与INS松紧两种组合定位方式为研究对象,从原理与定位模型上研究了两种组合,在此基础上使用了一种新颖的移动测量系统:Leica Pegasus:Backpack移动背包测量系统的实测数据并对两种组合进行了实测对比。实验结果分析表明:紧组合比松组合有更好的定位精度和鲁棒性,在卫星数量小于4颗的情况下,紧组合的定位精度相对于松组合在平面和天顶方向分别有30%和18%的提升;而在GNSS信号良好时松紧组合能够达到同样的定位精度;在运动载体姿态精度方面紧组合优于松组合。
GNSS;INS;组合导航;松组合;紧组合
0 引言
随着移动测量系统的不断发展,其定位方法越来越多样化,GNSS/INS组合定位方法就是其中之一。GNSS(Global Navigation Satellite System)能够实时提供位置、速度及时间信息,但系统容易受到外界条件干扰,误差因素多,定位精度降低[1],甚至发生定位错误与飘移,采用多星座来辅助单一的GPS系统能够增强一定的抗环扰动能力但依然不能完全解决因外部环境因素变化而导致航向信息测量精度降低或定位失效等问题[2]Liu H,Nassar S,Naser E S等人研究了两步平滑卡尔曼滤波算法在INS/GPS组合导航系统中的应用与标准卡尔曼滤波相比,该算法在GPS信号受到影响时有更高的位置测量精度[2]Fakharian A Thomas G,Mehrfam M.等人综合应用惯性测量单元与GPS进行导航,并采用一种自适应卡尔曼滤波算法进行位置信息融合,得到了更准确的路径跟踪效果[3]此外GNSS的定位结果输出频率有限,典型值大约为10 Hz,无法提供连续导航参数,对于动态定中将面临更为复杂的定位结算,不断变换的测站位置、复杂多变的外界环境、信号失缩、周跳等问题,而INS可以对GNSS的导航结果进行平滑弥补其信号的中断,INS能够输出更为平滑、连续的高速率导航解,输出速率高达200 Hz,能够提供高频率的位置、速度、姿态全导航解,且导航性能不受观测环境的影响[6],但INS的定位误差会随时间的增加而累积,通常可以利用GNSS观测值进行辅助修正[7]。GNSS/INS的组合导航可以提供连续、高带宽、长时和短时精度较高的、完整的导航参数,弥补了二者的不足,能够在复杂环境下进行导航定位,更进一步扩展了定位技术使用范围并且大大提高了移动定位技术的可靠性。
GNSS/INS组合导航是如今的研究热点,本文基于GNSS/INS组合导航系统的两种组合模式,推导了基于位置与速度的松组合算法,基于伪距和伪距率、伪距增量的紧组合算法,并使用Leica移动扫描背包系统的实测数据进行解算分析,对两种组合在组合原理,定位精度,载体姿态精度和适用条件四个方面进行了比较分析。
1 GNSS,INS定位原理与数学模型
1.1 组合定位中GNNS的定位方法及模型
随着多星座GNSS(Global Navigation Satellite System)的不断发展,观测卫星的数量大大增加,相比于单星座明显改善了卫星的几何分布,可观测卫星数量增加,定位精度提高,定位的连续性加强。对于高精度的GNSS定位一般使用载波相位差分定位的方法,能在短时间内获得厘米级定位精度[4]本文实验范围基本上在10km以内,属于中短基线,对于中短基线的解算通常使用双差模型[10]。

1.2 INS定位原理及模型
惯导系统INS(Inertial Navigation System)可分为平台式惯导系统和捷联式惯导系统两大类,捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。随着惯性传感器的发展与计算机技术的不断成熟,捷联式惯导系统成为现如今使用最为广泛的一种惯导系统[12]。惯性测量单元IMU(Inertial Measurement Unit)是惯导系统的核心,大多数IMU包含3个加速度计和3个单自由度陀螺仪,安装在3个正交敏感轴向上,载体在运动过程中通过积分运算获得载体的瞬时速度与瞬时位置信息。IMU原理如图1所示。
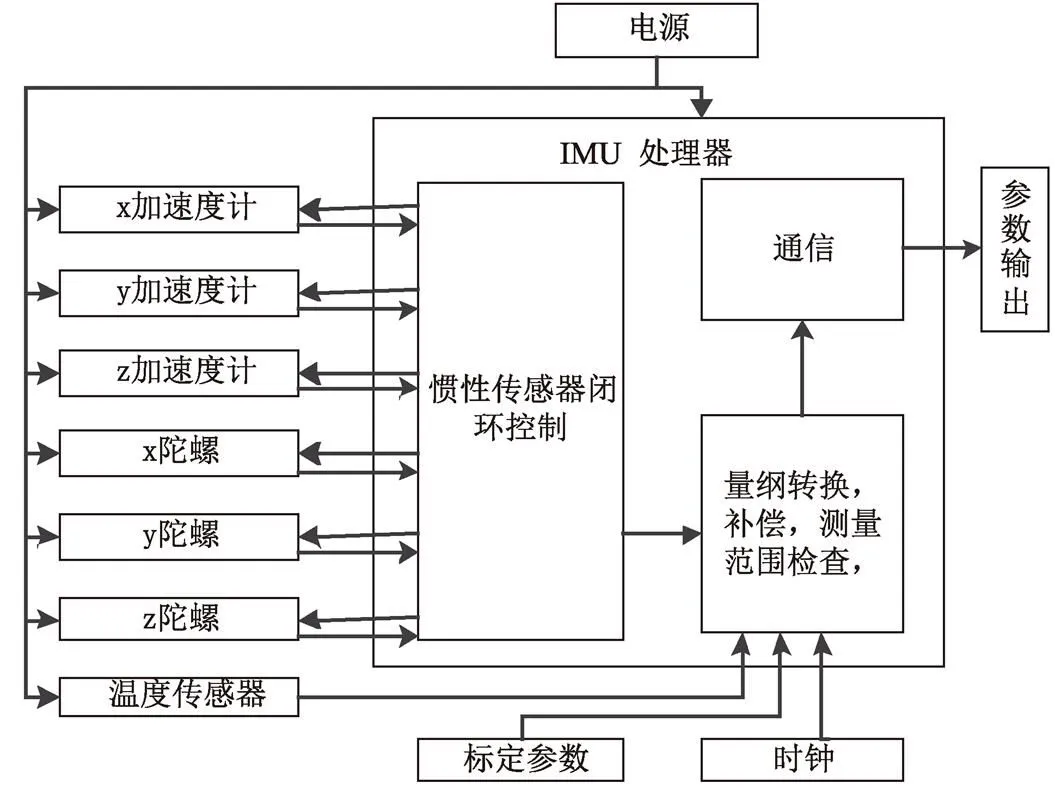
图1 惯性测量单元IMU原理
下面给出惯性导航参数更新的导航方程。

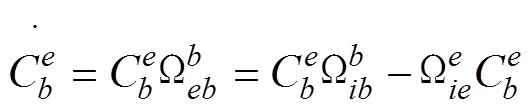

比力坐标转换:将IMU载体坐标系转换到位置速度求解的坐标系
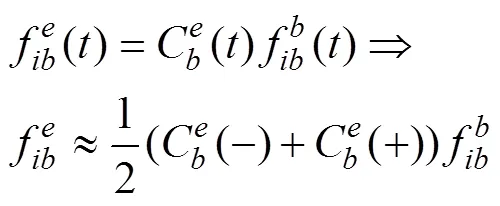
速度更新:包含使用引力模型或重力模型将比力转化为加速度的过程
位置更新:
2 GNSS/INS松组合导航原理与实现
在GNSS/INS松组合中,GNSS输出的位置和速度参数信息作为测量输入到GNSS/INS组合卡尔曼滤波器中,组合卡尔曼滤波器使用这些参数来估计INS误差。卡尔曼滤波器估计的INS误差对INS导航参数信息进行校正,进过校正后的INS导航参数构成组合导航输出。原理图如图3所示。
为了让读者更好的利用图书馆资源,做线上线下的推广活动,如公众账号推送图书馆数字资源,报告厅做图书分类、信息检索等系列讲座。
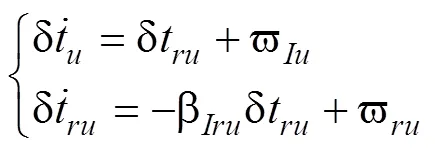
2.1 松组合系统状态方程

2.2 松组合系统观测方程
松组合的模型多采用捷联惯导系统与GNSS接收机输出的位置、速度之差作为外部观测量,观测方程为:

3 GNSS/INS紧组合导航原理与实现

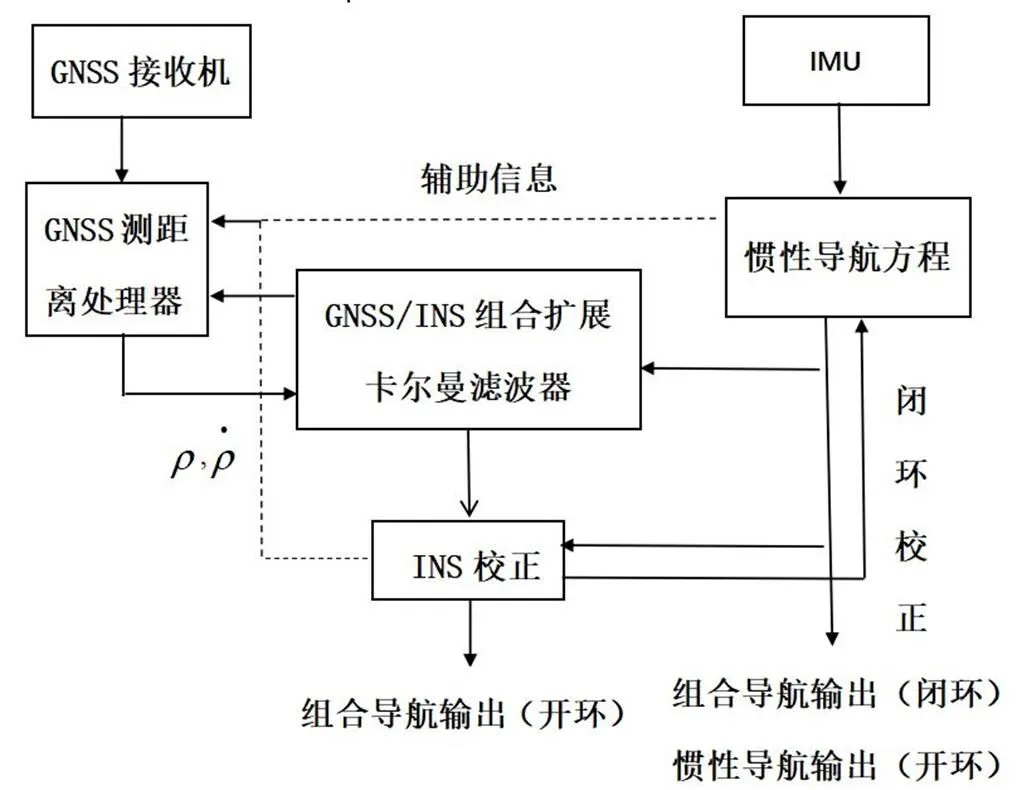
图4 紧组合导航原理图
3.1 紧组合系统状态方程
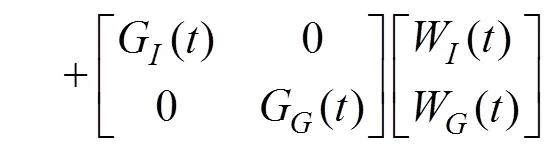
紧组合中的状态变量主要为两部分:惯导系统的误差状态,GNSS的误差状态。其中前者与松组合模式一样,其状态方程如下

GNSS的误差状态,在伪距、伪距率组合系统中,一般取两个与时间有关的误差


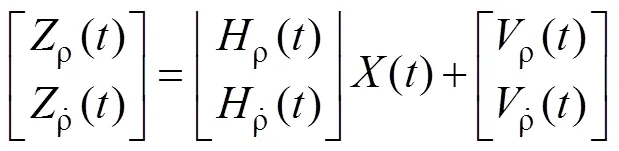
3.2 紧组合系统观测方程
基于伪距、伪距率的紧组合观测方程如下。
4 数据采集解算及实验结果分析
对上述理论过程进行试验论证。实验所用瑞士莱卡公司的Leica Pegasus:Backpack移动背包测量系统如图5所示,系统内置NovAtel Propack6型GNSS接收机,兼容北斗系统,天线类型为NovAtel GPS-704-WB,以及SPAN-IGM-S1一体式MEMS组合导航系统,MEMS系统集成了挪威Sensonor的高精度125Hz惯性测量单元STIM300和NovAtel OEM615板卡。其他软硬件设备还包括;南方灵锐S82-C GNSS接收机;Novatel公司开发的高精度GNSS差分及惯性定位后处理软件Inertial Explorer 8.7;Panasonic FZ-G1平板电脑以及连接设备等。GNSS接收机和IMU的性能指标如下表1表2 所示。
表1 NovAtel Propack6接收机主要性能参数

Tab.1 Main performance parameters of the NovAtel Propack6 receiver
表2 SPAN-IGM-S1的IMU主要性能参数

Tab.2 SPAN-IGM-S1's IMU main performance parameters

试验将基站架设在昆明市风东路与白塔路交叉路口的天桥上,对空条件良好,基站静态数据采集时间为10:00-12:00。测试轨迹如图6所示,运动方向如箭头所示,该段测试轨迹路属于典型的城市道路,轨迹包含对卫星信号有挑战的区域GPS时间为272310 s-272510 s(北京路部分人行道有茂密行道树,东方向有围墙,对卫星信号有遮挡,红色线段标记)和对空条件良好的区域(东风广场十字路口,东风东路,区域开阔对空条件良好,绿色线段标记)。
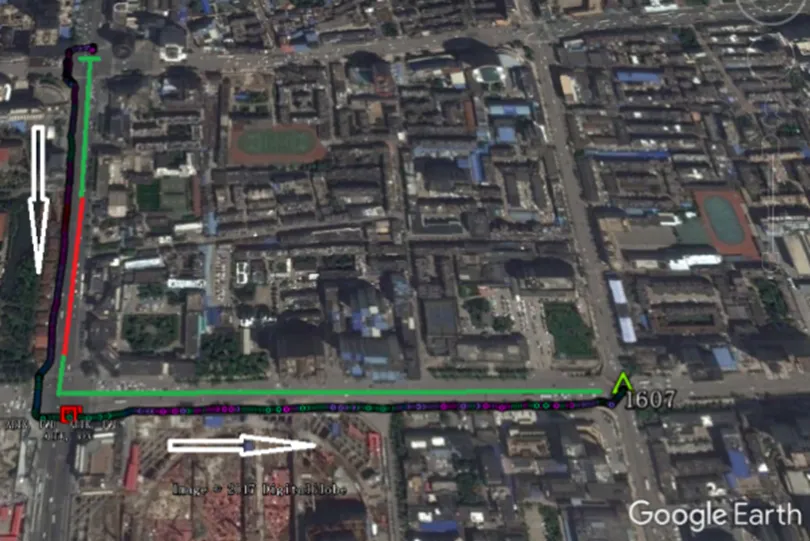
图6 载体运动轨迹
参数设置:卫星高度角设置为10°,基站与背包系统采样间隔均设置为1秒。惯导采样间隔设置为0.008秒(125 HZ)。
数据处理使用Inertial Explorer 8.70软件。Inertial Explorer软件为Novatel公司开发的高精度GNSS差分及惯性定位后处理软件,GNSS/INS后处理软件融合来自6自由度IMU传感器的变率数据与GNSS信息,利用IMU得到的捷联加速度计信息与角速度信息产生高更新率的坐标与姿态信息。GNSS模块必须先运行以便处理与在标准的Waypoint GrafNav fwd/rev/cmb文件中存储最佳的位置、速度与质量信息,IMU模块进行对齐、自动整理观测量与滤波。GPS坐标与速度更新通过时间匹配和内插离GPS观测历元最近的惯性更新数据实现。同时在滤波过程中进行传感器偏移校准。
试验结果得到松紧组合的姿态精度结果如图7和图8所示,可以看出紧组合的载体姿态精度优于松组合,但松紧组合在起始和结束阶段的姿态精度都比较差,这是由于惯导在起始和结束阶段必须利用GNSS的轨迹进行航向对齐[16],所以在进入测区采集数据时有必要在前后采集一段时间的GNSS/ INS数据。

图7 松组合姿态精度

图8 紧组合姿态精度
在对空条件良好无遮挡的开阔环境下271500 s- 271300 s,272500 s-273500 s两段时间内GNSS可以得到足够精度的导航结果,GNSS对惯导系统辅助可以达到同样的效果,所以在对空条件良好的环境下松组合与紧组合可以达到同等水平的定位精度,试验数据表明在开阔环境下GNSS/INS组合定位98%精度优于2 cm。
在272310 s-272510 s的200 s左右内,该段道路行道树密集,遮挡明显,从图9可已看出可观测卫星低于4颗,观测质量不佳,此时GNSS无法实现正常的速度与位置解算,在GNSS信号较差的200 s左右的时间内GNSS对惯导系统的辅助效果降低,惯导系统的定位误差会有一定的增加,但松组合与紧组合的位置精度在E,N,U三个方向上始终维持0.35 m以内。
松组合中是利用GNSS接收机输出的位置与速度信息进行GNSS/INS组合Kalman滤波对惯导系统进行校正,在复杂的环境中尤其是城市当中GNSS信号中断一分钟以上的情况比较常见,在GNSS定位中断的时间内,捷联式惯导系统单独工作,定位误差会随时间的累积而增加,图10图11图12中272310 s-271800 s段所示。在组合定位中,对于精度较低的IUM,一分钟的GNSS信号中断就会造成很大的误差累积。因此在观测卫星少于4颗的情况下,GNSS数据就不能用于对INS进行辅助,松组合的算法对GNNS的依赖较高,但松组合的组合方式简单,可以适用于任何INS与GNSS用户设备,使得松组合非常适用于改进类应用,松组合除了可以输出组合导航参数还可以独立输出GNSS导航结果,若采用INS开环校正还可以有独立的INS输出,可以进行完好性监测。
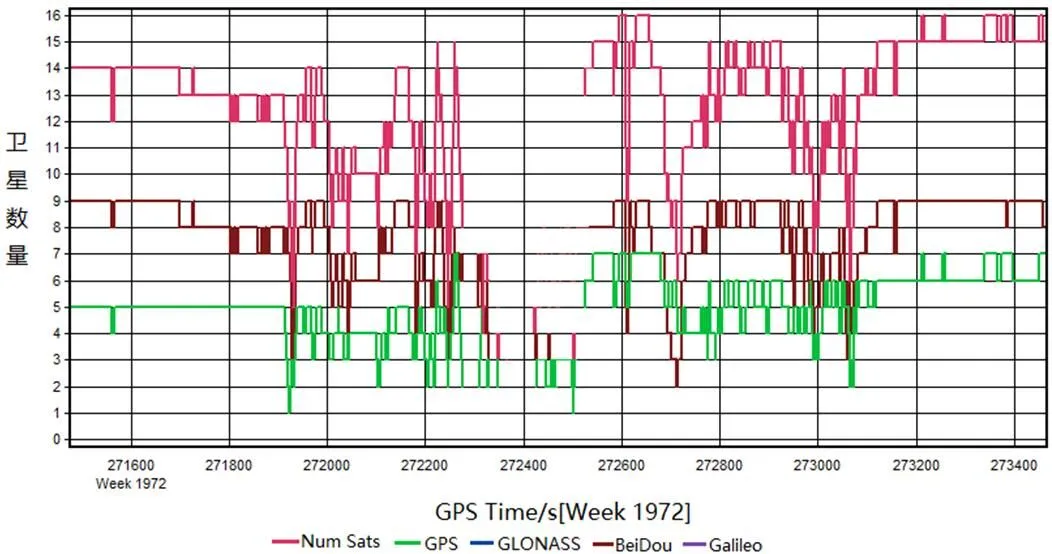
图9 观测卫星数量
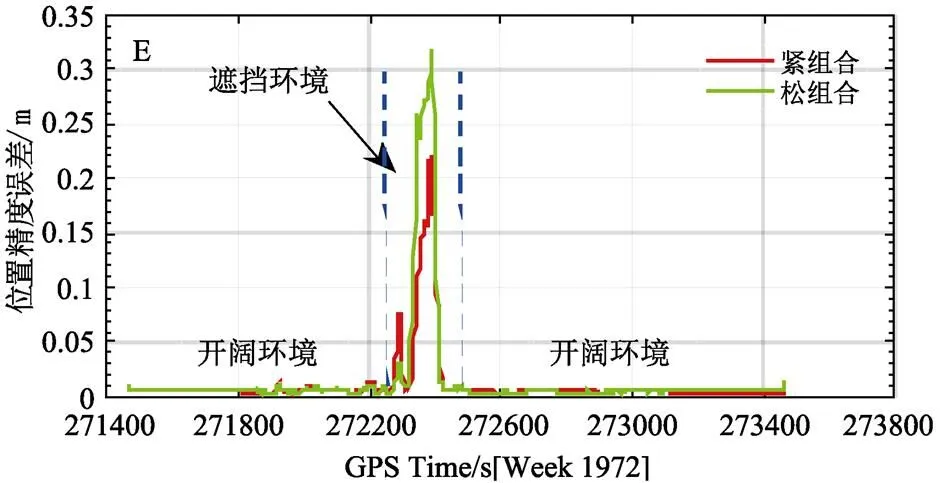
图10 E方向上的位置精度误差
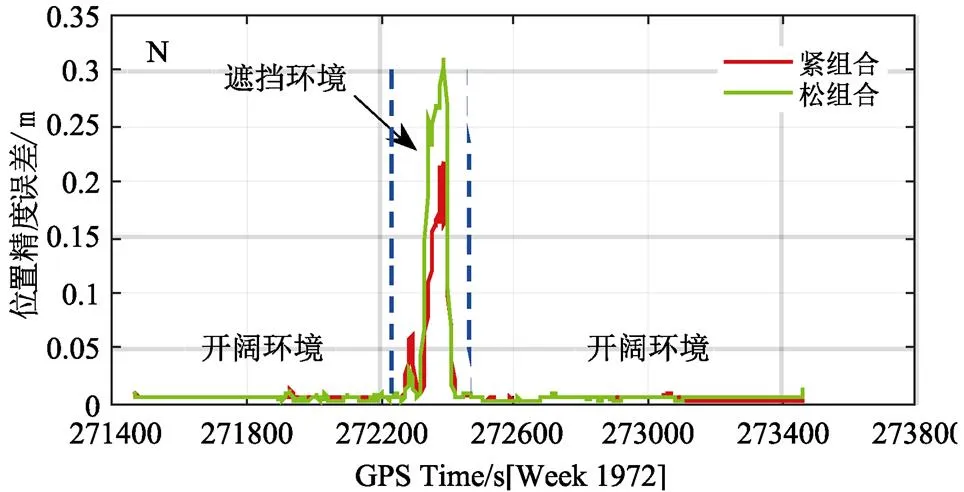
图11 N方向上的位置精度误差
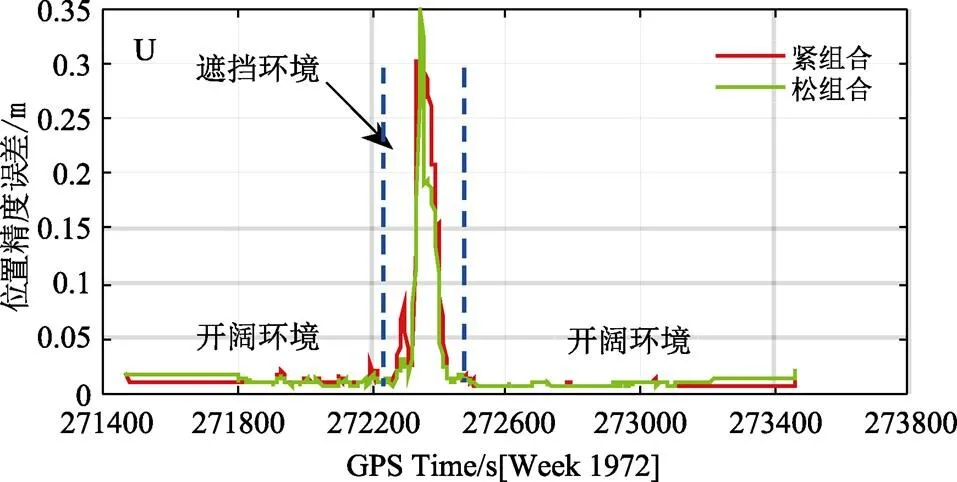
图12 U方向上的精度误差图
在GNSS无法输出位置与速度信息时,紧组合可以直接利用接收机输出的伪距,伪距率,多普勒频移等原始信息,不用解算出GNSS的速度与位置信息,当没有足够的卫星来计算出一个独立的GNSS导航参数时,GNSS的测量数据任然可以输入组合系统进行GNSS/INS组合扩展Kalman滤波,并用来辅助INS从而达到更好的定位精度,所以紧组合在GNSS卫星信号遮挡严重时短也能在短时间内保持一定的定位精度。从图11图12图13表3表4中可以看出在卫星遮挡环境下紧组合在E,N,U方向上的定位精度均优于松组合,紧组合的定位精度相对于松组合在平面上和天定方向分别有30%和18%的提升所以在相同的IUM和GNSS设备的条件下,GNSS/IN紧组合通常比松组合具有更好的定位精度和鲁棒性。
表3 位置精度误差最大值/m
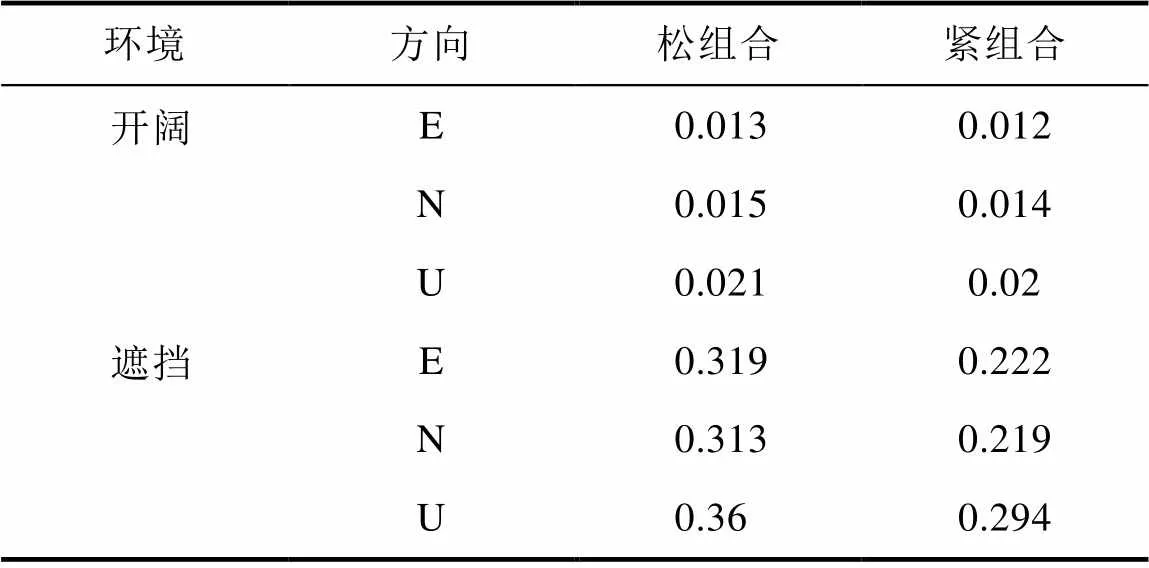
Tab.3 Maximum position accuracy error/m
表4 位置精度误差的RMS统计值/m
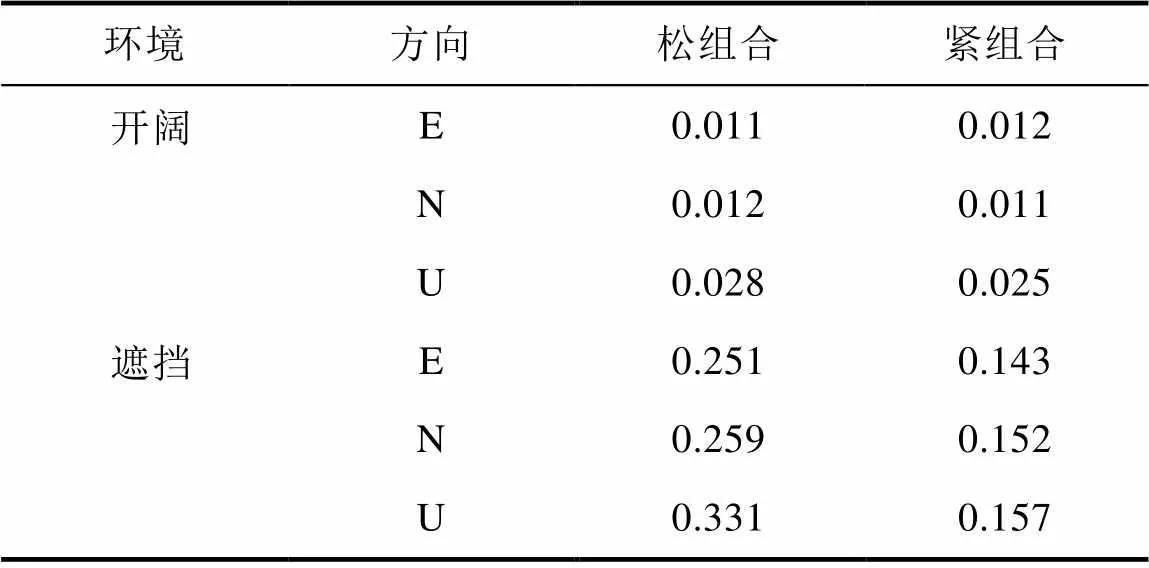
Tab.4 RMS statistical value/m of position accuracy error
5 结语
经上述研究本文得到以下结论:
(1)在组合算法上,松组合是基于位置与速度的算法,组合简单,可适用于任何INS,GNSS设备,适合于改进类应用,除了组合导航参数的输出还可单独输出GNSS导航结果,使用开环INS校正还有独立的INS输出,可以进行完好性监测;紧组合是基于伪距与伪距率的算法,在没有足够的卫星来计算出一个独立的GNSS导航参数时,GNSS的测量数据任然可以输入组合系统进行卡尔曼滤波用来辅助INS,在相同的惯导和GNSS设备下,紧组合通常比松组合拥有更好的精度和鲁棒性;(2)在载体精度方面,紧组合优于松组合;(3)位置精度方面,当可观测卫星数量较多时松组合与紧组合的位置精度水平大致相同时,都能获得厘米级定位精度,当观测卫星少于4颗时,紧组合的位置精度优于松组合;(4)对于测量系统而言紧组合适合使用于如城市复杂环境下的导航定位,松组合适用对空条件较好的开阔环境。组合导航的兴起[17]今后的导航方式会更加多元化[18]]室内外无缝定位技术更加成熟[19]。
[1] Godha S, Cannon M E. GPS/MEMS INS integrated system for navigation in urban areas[J]. Gps Solutions, 2007, 11(3): 193-203.
[2] Liu H, Nassar S, El-Sheimy N. Two-Filter Smoothing for Accurate INS/GPS Land-Vehicle Navigation in Urban Centers[J]. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4256-4267.
[3] Fakharian A, Gustafsson T, Mehrfam M. Adaptive Kalman filtering based navigation: An IMU/GPS integration approach[C]//IEEE International Conference on Networking, Sensing and Control. IEEE, 2011: 181-185.
[4] Spofford P R, Remondi B W. The national geodetic survey standard GPS format SP3[J]. SP3.
[5] [5] B.Parkinson.J.Spilker Jr, P. Axelrad.GPS Theory and Applications[M]. American Insttutide of Aeronautics and Astron-nautics, Inc 2006: 469-483, 169-187.
[6] Goldenberg F. Magnetic Heading, Achievements and Prospective[J]. Proceedings of the National Technical Meeting of the Institute of Navigation, 2007.
[7] 李彦杰, 杨元喜, 何海波. 附加约束条件对GNSS/INS组合导航结果的影响分析[J]. 武汉大学学报(信息科学版), 2017, 42(9): 1249-1255.
[8] 姜冬致. 惯导辅助GNSS整周模糊度快速固定算法与实现[D]. 合肥工业大学, 2017.
[9] 黄兵超. GPS/INS组合导航系统研究[D]. 国防科学技术大学, 2010.
[10] 何海波. 高精度GPS动态测量及质量控制[D]. 中国人民解放军信息工程大学, 2002.
[11] 李倩. GPS/INS组合导航系统研究及实现[D]. 上海交通大学, 2010.
[12] 朱静. SINS/GPS松组合与紧组合两种组合方式的对比研究[J]. 舰船电子工程, 2013, 33(6): 59-61.
[13] 徐寿志. 车载移动测量系统检校技术及其精度评定方法[D]. 武汉大学, 2016.
[14] 仇立成, 姚宜斌, 祝程程. GPS/INS松组合与紧组合的实现与定位精度比较[J]. 测绘地理信息, 2013, 38(3): 17-19.
[15] 李征航. GPS测量与数据处理[M]. 武汉大学出版社, 2010.
[16] 陈长军. 车载移动测量系统集成关键技术研究[D]. 武汉大学, 2013.
[17] 胡雨豪, 刘波. 基于机器视觉的四轴飞行器自主巡航算法改进[J]. 软件, 2018, 39(2): 52-56
[18] 肖启东. 多星座组合导航系统的RAIM 算法研究[J]. 软件, 2015, 36(4): 97-101.
[19] 宗宇雷, 吕品品, 李珂, 等. 混合参数方法下的室内无线定位技术综述[J]. 软件, 2016, 37(3): 62-66.
Comparative Study of GNSS/INS Combined Location Method for Mobile Measurement System
ZHANG Di1, SHI Kun1, LI Zhao-yong2
(1. School of land and resources engineering, Kunming University of Science and Technology, Kunming ,Yunnan 650093; 2. Kunming urban underground space planning and management office,Kunming, Yunnan 650011)
In this paper, two combinations of GNSS and INS in mobile measurement system are studied, and two combinations are studied from the principle and location model. On this basis, a novel mobile measurement system is used: the measured data of the Leica Pegasus:Backpack mobile knapsack measurement system and the measurement of the two combinations. Ratio. The experimental results show that the tight combination has better positioning accuracy and robustness than the loose combination. In the case of less than 4 satellites, the positioning precision of the tight combination is 30% and 18%, respectively, in the plane and the zenith direction, while the tight combination can reach the same positioning precision when the GNSS signal is good. The attitude accuracy of the moving carrier is better than that of the loose combination.
GNSS; INS; Integrated navigation; Loose combination; Tight combination
TP732
A
10.3969/j.issn.1003-6970.2018.08.023
张迪(1993-),男,硕士研究生,主要研究方向:3S集成及应用;施昆(1959-),男,教授,主要研究方向:GPS,大地量;李照永(1977-),男,高级工程师,主要研究方向:GPS,三维激光,地下空间信息化。
本文著录格式:张迪,施昆,李照永. 移动测量系统的GNSS/INS组合定位方法的对比研究[J]. 软件,2018,39(8):110-116
