基于四旋翼飞行器对地面移动信标自主探测和跟踪系统的研究与实现
2018-09-12王博钱家琛邱城伟肖建
王博 钱家琛 邱城伟 肖建
摘要:介绍了一种基于四旋翼飞行器快速、稳定探测和跟综地面上有色信标的系统。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器、可遥控移动的有色信标小车和遥控终端均采用Cortex-M3内核处理器。四旋翼飞行器能准确探测到地面上的有色信标位置,并在信标静止的情况下能快速稳定悬停在信标的正上方。在遥控终端控制有色信标小车任意方向移动,四旋翼飞行器能快速跟踪信标的移动。当四旋翼飞行器在有色信标小车上方一定距离和范围内时,四旋翼飞行器和小车同时发出声光报警。
关键词:四旋翼飞行器;探测和跟踪;颜色识别;PID控制
DOI: 10.396 9/j.issn.1005-5517.2 01 8.7.009
0 引言
四旋翼飞行器具有体积小、重量轻、易组装、灵活度高、隐藏性好等特点,适用多种空间场所,可以在任何小平台上灵活起降。它方便携带,低空飞行性好,能执行各种不适合人体环境的特种任务,可在复杂环境下如洞穴隧道等幽闭场所快速执行侦察、勘察任务。
基于四旋翼飞行器的地面移动信标自主探测和跟踪系统能有效快速、稳定地对地面目标实时跟踪,因此在军事侦察、交通监控、抗灾救援、民用领域等都有着广阔的应用前景。该技术得到很多专家们的高度关注,成为当前该领域下最活跃的研究方向之一。
1 系統整体方案
系统整体功能框图如图1所示。本系统旨在设计并制作一架能稳定飞行的四旋翼飞行器,且具有目标物体探测识别、自动定位、自主跟踪地面上运动的信标小车等功能。该系统由三部分组成:具有探测和跟踪功能的四旋翼飞行器、可遥控移动的有色信标小车和遥控终端(地面站)。四旋翼飞行器借助pixHawk飞控平台,负责飞行姿态检测;飞行控制以两块瑞萨RX23T单片机为核心,由openMV图像识别模块、超声波测距模块、声光报警模块等几部分构成,飞行过程中,经过瑞萨芯片处理各外设采集的包括飞行器高度、色块位置、小车位置等数据,结合PID控制算法给出飞行器的飞行决策,同时解算出相应通道值(pitcH、yaw、roll和tH rottle等),通过ppm信号控制飞控板及时来调整电机转速值,使飞行器稳定在指定高度,调整飞行姿态,使飞行器及时到达相应的位置,从而对地面信标实现探测和跟踪等功能。遥控终端(地面站)控制信标小车的移动并实时反馈显示系统状态信息。
2 四旋翼飞行器控制与导航
四旋翼飞行器控制部分机构框图如图2所示。四旋翼飞行器借助PixHawk平台以及两块瑞萨开发板RX23T协同控制;一块RX23T作飞行控制,另一块RX23T作信息处理。两块RX23T之间通过I2C进行通信,作飞行控制的RX23T与PixHawk通过Mavlink进行通信。图像数据借助。penMV实现采集:高度信息借助超声波模块实现采集。高度信息和图像信息在信息处理板中进行数据融合后,经I2C传输给飞行控制板和经无线数传模块传给小车遥控器(地面站),飞行控制板结合Pixhawk回传的飞行器当前姿态等信息给出正确的飞行决策,并将此次的飞行决策写入PPM编码中传给Pixhawk。小车遥控器将接收到的的融合数据重新解码,并在串口屏上显示出来供用户查看飞行器当前的运动信息。
3 有色信标小车制作
在本次系统中移动的信标用遥控小车来模拟。为让信标小车能被四旋翼飞行器唯一探测和跟踪到,在小车顶部用红色布片作为信标特征以便摄像头识别。
信标小车为四轮机械小车,核心控制板采用的是TI公司的TM4C123G开发板;采用工作电压为12 V、带有霍尔编码器、减速比为30:1的直流有刷电机,通过L298N驱动。信标小车将接收到的控制信号解码后换算为小车左右两边电机的转速值,并借助霍尔编码器对其转速进行的PID调控,精确快速的控制小车移动。
4 小型遥控器(地面站)的制作
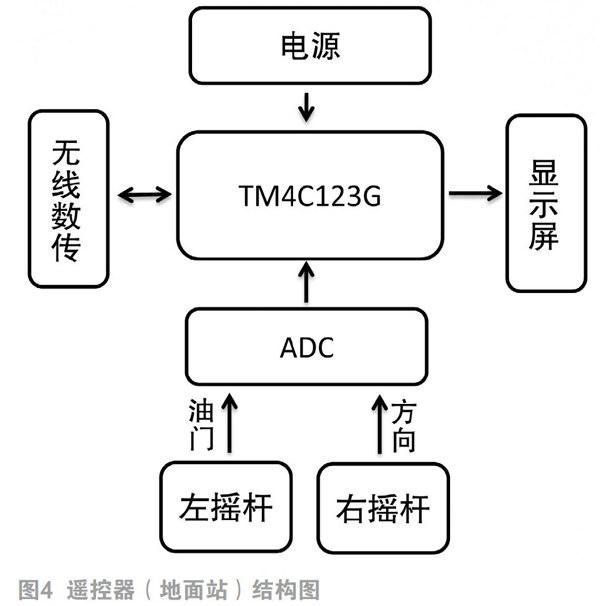
遥控器终端(地面站)采用TI公司的TM4C123G芯片作为处理器。遥控器的主要功能是控制信标小车的移动和人性化展示系统的状态信息 飞行器当前的运动姿态及检测到的信标位置坐标值和信标小车的运动状态。
遥控器终端的结构框图如图3所示。左遥杆负责控制小车的油门,即控制小车的前行速度的快慢;右摇杆负责小车的方向,即控制小车的左右移动的快慢。遥杆输出的模拟量通过ADC采样后输入给单片机,单片机将其转换成控制电机转速的PWM信号并通过无线数据传输给信标小车。显示屏上有人性化的信息界面和控制面板,当地面上有多个信标存在时,可通过显示屏上的控制面板选择飞行器探测和跟踪指定的信标。
5 信标的快速定位和追踪
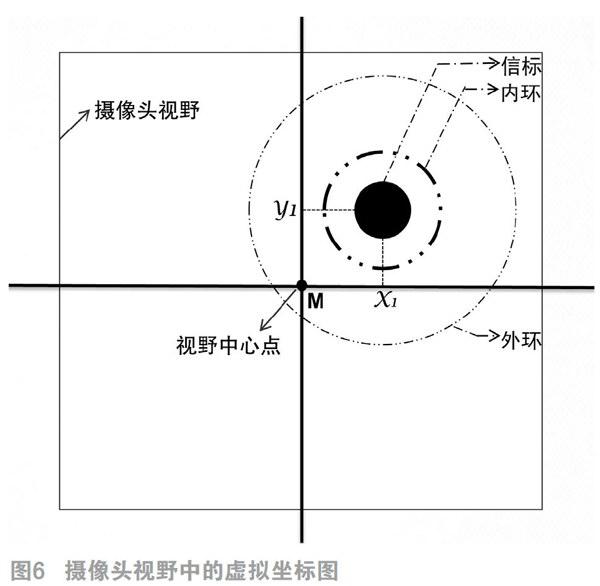
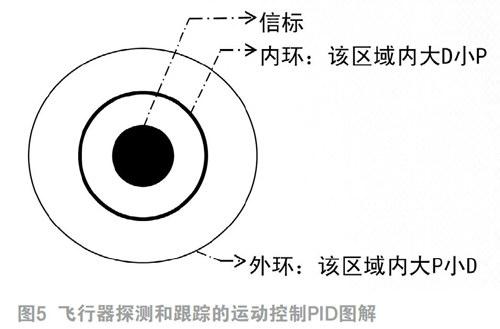
本系统的难点之一在于如何实现四旋翼飞行器对信标的快速探测和动态跟踪。对此,提出一种新型的pid控制方法 将摄像头视野中信标小车的周围区域划分为内外两个“环”,外环区域内飞行器的运动具有大的比例(P)控制和小的微分(D)控制,内环区域内飞行器的运动具有小的比例(P)控制和大的微分(D)控制。简单来讲,就是“外环大P小D,内环大D小P”,探测和跟踪的运动控制PID图解如图4所示。为求解飞行器对信标小车的相对位置,我们在摄像头视野中建立如图5所示的虚拟坐标图。摄像头置于飞行器底部,所以摄像头视野中心点M坐标为(x0,y0)可看成飞行器在地面上的投影位置,通过简单的视觉处理,可算出信标在坐标图中的位置(xl,yl),xl- x0和yl- y0就是飞行器与信标的相对坐标差 飞行器探测和跟踪控制PID的重要输入参数。当M点在“外环”时,根据前述的控制算法,飞行器会快速调整运动状态向信标移动:当M点位于“内环”之中时,飞行器的运动相对缓和,最终稳定悬停在信标的正上方,实现对信标的快速探测和稳定跟踪。
