基于无线传感网的移动气象平台的设计
2018-09-12刘娜周杰
刘娜 周杰
摘 要: 根据全方位巡逻式气象监测技术的需求,提出一种基于无线传感网的移动式气象监测平台的设计方法。此设计分别由分布在平台不同位置的多个传感器获得环境参数,再通过ZigBee组建的无线通信技术传输到监控终端实现数据的存储与显示。不仅可以对某一场所进行巡逻式的全方位检测,还可通过监控终端对指定地点进行针对性的检测。实验结果表明,气象平台具有智能化、高精度、低功耗、可移动等优点,特别适用于对某一特定场所进行巡逻式实时检测。
关键词: MSP430单片机; 压力传感器; ZigBee; 无线传感网; 气象监测; 移动气象平台
中图分类号: TN926?34; TH765 文献标识码: A 文章编号: 1004?373X(2018)18?0006?06
Design of mobile meteorological platform based on wireless sensor network
LIU Na1, ZHOU Jie1,2
(1. Key Laboratory of Meteorological Observation and Information Processing, Nanjing University of Information Science & Technology, Nanjing 210044, China;
2. Department of Electronic and Electrical Engineering, Niigata University, Niigata 950?2181, Japan)
Abstract: A design method of the mobile meteorological monitoring platform based on wireless sensor network is proposed according to the demand of the all?round patrol meteorological monitoring technology. In the design, the environmental parameters are obtained from multiple sensors distributed at different locations of the platform, and then transmitted to the monitoring terminal by means of the ZigBee wireless communication technology, so as to realize data storage and display. The platform can not only conduct all?round patrol detection of a certain place, but also conduct targeted detection of a designated place by using the monitoring terminal. The experimental results show that the meteorological platform has the advantages of intelligence, high precision, low power consumption, and mobility, which is especially applicable for real?time patrol detection of a specific place.
Keywords: MSP430 SCM; pressure sensor; ZigBee; wireless sensor network; meteorological monitoring; mobile meteorological platform
0 引 言
风向、风速以及温湿度等气象信息的有效监测在日常生活的各个领域都格外重要,然而传统的风向风速采集设备存在体积庞大、不易于安装及转移等缺点,而且使用时会受到空间的限制。因此,研究一种能对非固定地点进行实时监测,并且可移动的气象监测装置就显得十分必要。此外,可将ZigBee无线通信技术应用在该平台,实现无线远程监测与控制。另外,该平台具有高精度的智能压力传感器系统和电子罗盘装置,可以精确测量风速风向。
1 总体设计
该移动气象监测平台硬件结构包括MSP430控制系统、各个数据测量模块、太阳能双轴追光云台、移动平台、无线通信装置、供电电源、监控终端,系统框图如图1所示。
该气象监测设备的移动平台配有L298N电机驱动模块驱动直流电机,并配合超声波避障以及红外巡线等模块,实现平台的移动;步进电机以及光敏电阻模块构成自动追光系统;由温湿度传感器测得当前位置的温度以及湿度;由压力传感器采集的压力值以及电子罗盘采集的方位角,通过MSP430控制系统进行分析处理得到风速风向。
ZigBee无线模块作为监控终端和移动平台之间双向数据传输的装置,可将控制器处理后的气象数据传送到监控终端显示并存储,也可将监控终端的控制命令传送至控制器对装置进行实时操作控制。
2 温湿度测量原理
DHT11数字温湿度传感器内包含已校准的数字信号输出的温湿度复合传感器,传感器内包含一个电阻式感湿元件和一个负温度系数的测温元件,且与一个高性能的处理器相连接。因此该数字温湿度传感器具有反应速度快、精确度高等特点。
将串行时钟输入信号SCK用于控制器与DHT11之间,实现同步信息通信[1?2]。DHT11与MSP430通信接线如图2所示。
3 风力测量原理
可以通过测量某一点的大气压差计算得到该点的风压,然后把压差信号转换成电压信号,因此需要用到压力传感器。本装置采用的压力传感器是基于压阻效应技术[3?4]的BMP085,具有稳定的电磁兼容性、高精度、线性以及稳定性,与MSP430通过I2C进行数据通信,接线电路如图3所示。
压阻式压力传感器的4个检测电阻构成惠斯通电桥形式[5?7],将测得的压力值转换成相应的电压信号。假设4个检测电阻的阻值都相等,当有风时,周围大气压会发生变化,4个检测电阻的阻值将发生变化产生压差,将压差转化为相应的应力值,得出大气压值。但由于温度影响,将会使每个电阻值都会产生误差,而惠斯通电桥形式将温度产生的误差进行抵消,提高测量精度。
测量时,压力传感器位置如图4所示。
风向装置将自动调整压力传感器的压孔对准风向,可测得周围大气压的总压力值。将周围空气的动压力[PD]、风的总压力[PZ]以及静压力[PJ]可用流体空气动力学的伯努利方程计算表示[8?9]:
其中,风速与空气流动的动压力的关系为: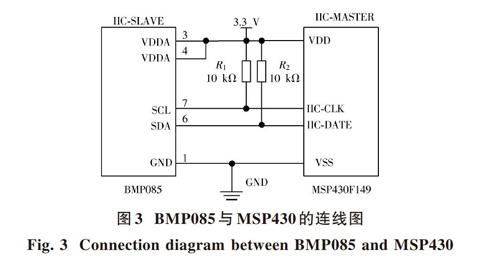
式中:[ρ]为空气密度(单位:kg/m3);[V]为风速(單位:m/s)。从而可以导出计算风速公式: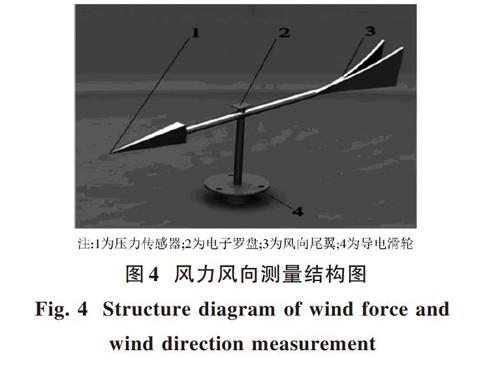
即:得到周围大气流动的动压力和空气密度,就可以得到风速值。
其中,空气密度的表达式为:
式中:[P]为大气压力(单位:Pa);[RB]为干空气的比气体常数,取287.05 J·kg-1·K-1;[T]为空气的热力学温度(单位:K);[e]为空气中的水汽压(单位:Pa)。
在设计中,由于采集到的电信号与风压之间并非线性关系,为了满足高精度的要求,因此采用归十法对A/D转换得到的电压信号进行补偿处理。气压与电压关系表如表1所示。
从表1中的数据可以看出,用归十法[10]对采集到的数据进行补偿后,电压值随着压强的增大而增大,两者之间存在一定的线性关系。
4 风向测量原理
电子罗盘HMC5883L是一种用于检测弱磁的传感器芯片,其输出为数字信号。通过对地磁的测量,得到装置的各方位姿态角[11],并且在轴向具有灵敏度高和线性的特点,把它用在测量风向上,精确度可达0.1°。通过I2C总线直接与MSP430相连,如图5所示,把传感器周期性采集到的数据,通过I2C协议传输到MSP430控制器内部进行分析处理。
磁场在赤道附近是与当地的水平面平行,而在北半球磁场方向与地面呈现一定的夹角。对于地球上任何一个定点来说,这个磁矢量可以分解为两个分量:一个平行于当地水平面的水平分量;另一个垂直于当地水平面的垂直分量。若电子罗盘持续平行于当地的水平面,则罗盘中三个轴方向的磁力计分别和三个分量一一对应,分解示意图如图6所示。
现实中,对水平X,Y方向的两个分量来说,叠加的矢量和总是指向磁北方向。电子罗盘中的航向角(Azimuth)定义即当前方向和磁北的夹角。在水平路面行驶时,罗盘保持水平,只需要用磁力计测得水平方向两轴(通常为X轴和Y轴)地磁矢量的分量,航向角计算公式为:
该设备在实际运行中,特别是经过倾斜路面时,并不能保证电子罗盘始终与水平面保持平行,所以不能使用式(5)直接进行计算航向角。若要得到最后精确的测量结果,需要对测量的航向角进行倾斜补偿[12]。
使用三轴重力加速度计分别测出X,Y,Z三个轴的重力加速度分量为[Ax],[Ay],[Az],结合几何空间计算出横滚角[θ]和俯仰角[ψ]:
结合磁力的水平分量X,Y,Z对计算的航向角做倾斜补偿。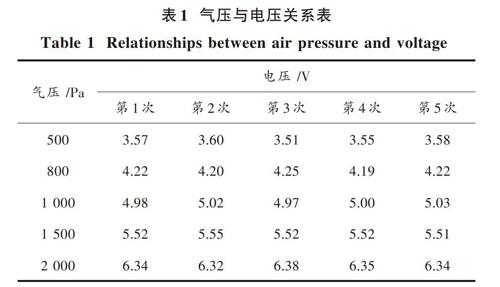

得航向角: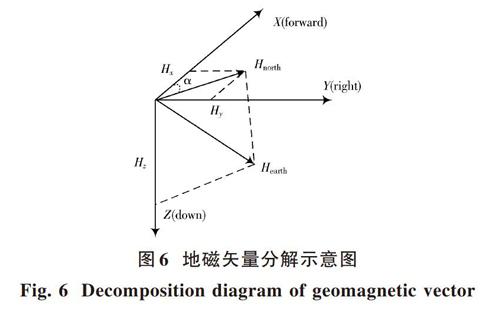
因为地理北极与地磁北极之间存在磁偏夹角,两者并不完全重合,所以计算得到的航向角并不是指向正北的航向角。考虑到每个地区的磁偏角并不相等,所以通过查表得到当地的磁偏角,加上整个空间象限,所以计算航向角的公式改为:[ α=180°-arctan(YHXH), XH≤0arctan(YHXH), XH>0,YH≤0360°-arctan(YHXH), XH≥0,YH>0]
但是在周围的测量环境中,不可避免地会引入许多磁场干扰,对测量值造成动态或静态的影响。对于静态引起的固定值的误差采用定值补偿[13];对于动态变化的误差,采用基于最小二乘的24位置补偿方法[14],更加精确地测得风向角。具体的实施方法是把水平方向的360°周角平均分成24个测量区,每个区域15°,共得到24组航向角的基础数据,求出补偿系数代入补偿公式即可得到更加精确的航向角。
记误差方程:
式中: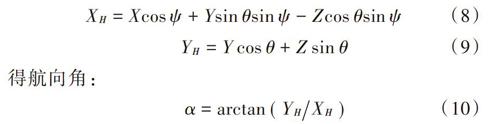
将这24组数据全部代入补偿公式,根据矩阵函数的性质运算,即可求得罗盘误差的补偿系数:
将补偿系数和测量数据代入补偿公式得到精确的航向角测量结果,即得到精确的风向。
5 太阳能双轴追光云台
太阳能双轴追光云台的结构如图7所示。
在太阳能电池板正面的上下左右各放置光敏传感器A,B,C,D,通过对比光敏传感器C,D的测量值得到太阳的水平方位,对比光敏传感器A,B测量值得到垂直方位。为加快电池板的工作效率,再在电池板的正反面中间各放置一个光敏传感器E,F,对比光敏传感器E,F测量值检测是否背光。这种设计可以使太阳能电池板实现水平360°、垂直180°自由旋转追光,旋转度数精确,将光电转化效率上升到最大化。
由6个感光光敏电阻测得的光照强度通过A/D转换传送到控制器,再通过光强比较法得出太阳的具体方位角。最后通过MSP430控制器控制追光平台上的步进电机组以调整太阳能电池板的方位角和仰角。软件控制流程图如图8所示,使电池板与阳光始终垂直,极大地提高了太阳能的利用效率[15]。
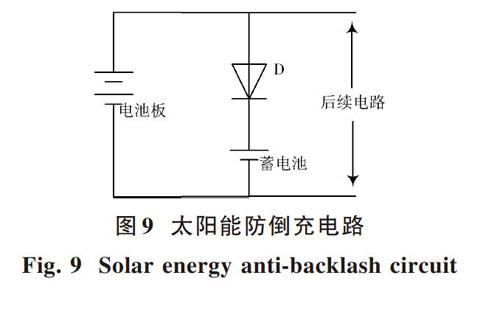
在太阳能给蓄电池充电过程中,为防止对蓄电池过充从而降低其寿命,应当设计充电保护电路。当太阳能电池板的两端电压低于电池两端电压时,便会出现反向充电的现象,即电池给太阳能电池板充电,为避免此现象,应当在太阳能电池板和电池之间连接防倒充装置电路如图9所示。
6 移动平台
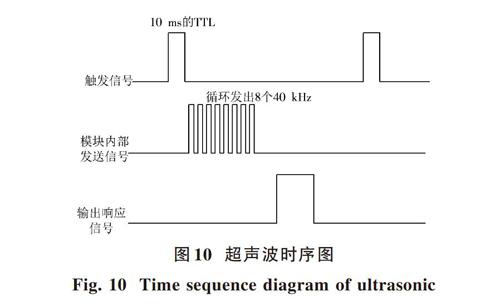
该装置大致可分为三大组成部分:检测部分、执行部分、CPU控制部分。平台采用履带式,能克服各种坎坷路面。该移动平台能实现自动寻线避障功能,还可以自动绕过障碍物重新回到轨迹。到达指定地点进行气象探测。基于以上功能,该移动平台要识别障碍物需要传感器作为探测器以识别前方路况,高性能的图像处理能带来最优的前方图像识别,但无疑增加了成本负担和开发周期,所以本设备采用红外传感器作为路况探测器,而控制方面采用由软件模拟PWM输出调制进行实时控制驱动直流电机,配合软件编程实现目标移动。寻线部分采用6只红外传感器,由发射管发射红外线,经过路面轨迹的反射传送到红外传感器的接收管,经数据汇总后得到移动平台与轨迹的相对位置。根据6只红外数据由控制器根据软件调节小车的转速和方向,使小车重新回到规定的轨迹。避障部分,首先利用控制器输出一个40 kHz的触发信号,把触发信号通过TRIG管脚输入到超声波测距模块;再由超声波内部的发射器向某一方向发射超声波,在发射的同时控制器通过,软件开始计时;超声波在传播过程中,如若遇到障碍物则返回,超声波测距模块的接收器收到反射波后通过产生一个回应信号并通过ECHO脚反馈给控制器,此时控制器就立即停止计时。时序图如图10所示。
超聲波在空气中的传播速度为340 m/s,根据回响电平与检测距离成比例,由计时器记录时间,可以算出发射点距障碍物的距离,即: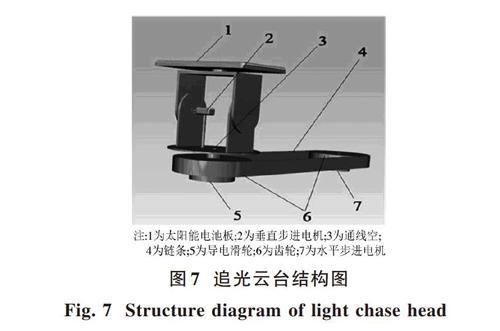
通过式(16)控制器来算出距离,并做出相应的绕行运动轨迹。移动平台的控制流程如图11所示。
7 监控终端
本系统采用控件SerialPort进行串口连接,将收到的数据进行正则表示存入内存数组,采用第三方控件ZedGraph绘制折线图。为了保证数据不会丢失,将数据存入本地数据库,数据库采用同样是微软公司的Aeecss数据库来保证最大兼容性。检测终端的界面如图12所示。
检测终端主要分为三部分:
1) 向移动平台发送控制命令。采用SerialPort控件Write方法进行比特流传送,先提前将商定好要传送的数据进行比特转换后再传输。控制分为自动控制与手动控制两种,选择会向移动平台发送相应命令,让移动平台在自动巡线与手动控制进行选择。
2) 数据的接收。采用SerialPort控件与移动平台连接,监控终端界面通过SerialPort1 _DataReceived函数进行数据接收,用正则表示存入内存数组,分别赋值到监控终端页面标签控件,从而显示即时数据;同时将数组数据通过调用GraphPane函数再在第三方控件ZedGraph所画的折线图上做点。从而完成所有数据接收功能。
3) 数据的保存。开启数据存儲,将数据储存到Aeecss数据库中,并且通过Sel页面选取数据存储日期查看从前存入的数据。
8 结 语
本文提出一种基于无线传感网的移动式气象监测平台的设计方法。此设计分别由分布在平台不同位置的多个传感器获得环境参数,再通过ZigBee组建的无线通信技术传输到监控终端实现数据的存储与显示。不仅可以对某一场所进行巡逻式的全方位检测,还可通过监控终端对指定地点进行针对性的检测。实验结果表明,气象平台具有智能化、高精度、低功耗、可移动等优点,特别适用于对某一特定场所进行巡逻式实时检测。
参考文献
[1] 姚德法,张洪林.串行时钟芯片DS1302的原理与使用[J].信息技术与信息化,2006(1):92?94.
YAO Defa, ZHANG Honglin. How to use the trickle charge timekeeping chip DS1302 [J]. Information technology & informatization, 2006(1): 92?94.
[2] 石宗义.I2C总线时序分析及其模拟[J].太原理工大学学报,2004,35(1):53?56.
SHI Zongyi. The time?order analysis of I2C?bus and its simulation [J]. Journal of Taiyuan University of Technology, 2004, 35(1): 53?56.
[3] 张文.压阻式压力传感器的温度误差补偿技术及虚拟仪器的组建[D].合肥:合肥工业大学,2004.
ZHANG Wen. Compensation technology for thermals errors of piezoresistive pressure sensor and the construction of virtual instruments [D]. Hefei: Hefei University of Technology, 2004.
[4] 王淑华.MEMS传感器现状及应用[J].微纳电子技术,2011,48(8):516?522.
WANG Shuhua. Current status and applications of MEMS sensors [J]. Micronanoelectronic technology, 2011, 48(8): 516?522.
[5] 董康军,田苏阳.惠斯通电桥测量杨氏模量的实验探究[J].渭南师范学院学报,2013,28(12):37?39.
DONG Kangjun, TIAN Suyang. Inquiring on measuring young′s modulus of the wheatstone bridge method [J]. Journal of Weinan Normal University, 2013, 28(12): 37?39.
[6] 陈泽章,陈廷侠.惠斯通电桥灵敏度分析[J].新乡学院学报(自然科学版),2008,25(4):24?26.
CHEN Zezhang, CHEN Tingxia. Brief analysis on the sensitivity of wheatstone electric bridge [J]. Journal of Xinxiang University (Natural science edition), 2008, 25(4): 24?26.
[7] 李尧,孙鹏,王永超.提高惠斯通电桥灵敏度的方法[J].大学物理实验,2011,24(2):28?31.
LI Yao, SUN Peng, WANG Yongchao. Methods of improving wheatstone bridge′s sensitivity [J]. Physical experiment of college, 2011, 24(2): 28?31.
[8] 全丽希.基于温度压力补偿的风速计的研究[D].南昌:东华理工大学,2015.
QUAN Lixi. Study of anemometer based on the temperature and pressure compensation [D]. Nanchang: East China University of Technology, 2015.
[9] 张翼飞,孙以材,潘国峰.基于压力传感器的风速风压测量系统与无线数据传输[J].传感器世界,2009,15(3):44?46.
ZHANG Yifei, SUN Yicai, PAN Guofeng. The measurement of wind pressure and speed based on the pressure sensor and wireless data transmission [J]. Sensor world, 2009, 15(3): 44?46.
[10] 王惠文,孟洁.多元线性回归的预测建模方法[J].北京航空航天大学学报,2007,33(4):500?504.
WANG Huiwen, MENG Jie. Predictive modeling on multivariate linear regression [J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(4): 500?504.
[11] 王立代,熊沈蜀,周兆英.基于MEMS压力传感器的微小型空速计[J].清华大学学报(自然科学版),2005,45(8):1066?1068.
WANG Lidai, XIONG Shenshu, ZHOU Zhaoying. Miniature airspeed meter based on MEMS pressure sensor [J]. Journal of Tsinghua University (Science and technology), 2005, 45(8): 1066?1068.
[12] 金海红,吴东升,田柳,等.倾斜补偿式地磁传感器的设计与误差补偿方法[J].传感器与微系统,2010,29(7):33?36.
JIN Haihong, WU Dongsheng, TIAN Liu, et al. Design and error compensation method of tilt compensated earth magnetism sensor [J]. Transducer and microsystem technologies, 2010, 29(7): 33?36.
[13] 贾意弦,辛长范,马云建,等.倾斜状态下电子磁罗盘的测角补偿算法研究[J].机械工程与自动化,2016(2):42?43.
JIA Yixian, XIN Changfan, MA Yunjian, et al. Inclination angle measurement compensation algorithm for electronic magnetic compass [J]. Mechanical engineering & automation, 2016(2): 42?43.
[14] 闫蓓,王斌,李媛.基于最小二乘法的椭圆拟合改进算法[J].北京航空航天大学学报,2008,34(3):295?298.
YAN Bei, WANG Bin, LI Yuan. Optimal ellipse fitting method based on least?square principle [J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(3): 295?298.
[15] 欧阳名三,徐锐.太阳自动跟踪系统的研究[J].仪表技术,2013(11):21?23.
OUYANG Mingsan, XU Rui. Design of sun?tracking system [J]. Instrumentation technology, 2013(11): 21?23.
