无感无刷直流电动机技术在密度仪器上的应用
2018-09-11李岑
李 岑
(中国石油集团测井有限公司大庆分公司 黑龙江 大庆 163412)
0 引 言
早期的密度仪器使用单相交流电动机[1]开关腿,要使电动机能自动旋转起来,需要在运行绕组与起动绕组之间串联一个合适的电容,使她们的电流在相位上近似相差90°,这样两个在时间上相差90°的电流通入两个在空间上相差90°的绕组,将会在空间上产生(两相)旋转磁场,在这个旋转磁场作用下,转子就能自动起动。单相交流电动机虽然结构简单,运行可靠,但在用电容起动电动机时,电容的大小影响到电动机起动时的转距,电容太大时转距过大造成起动时间过长,容易造成起动线圈发生故障,电容太小时转距太小造成起动不完全,有可能因起动不起来造成运行线圈烧掉,除此之外,用外接起动电容的方法起动单相交流电动机,冲击电流是额定电流的5~7倍,不但可能烧毁电容,而且可能超过电动机的契约容量而损坏电动机。为了避免这些隐患,无感无刷直流电动机开始应用在密度仪器上。
1 无感无刷直流电动机技术
1.1 直流无刷电动机工作原理
直流无刷电动机[2]的主要组成部分有电动机本体、位置传感器与电子开关等3部分,如图1所示。定子绕组一般制成多相(三、四、五相不等),转子由永久磁铁按一定的极对数(2 p=2,4,…)组成,电子开关一般是由功率电子器件和它的控制电路以及转子位置传感器等所组成。图1所示的电动机本体为2极三相,定子A、B、C相绕组分别与电力开关元件V1,V2,V3相接。位置传感器的跟踪转子与电动机转轴相连接。

图1 直流无刷电动机的组成原理图
定子绕组的某一相通电时,该电流与转子永久磁铁的磁极产生的磁场相互作用,从而产生转距,驱动转子旋转;再由位置传感器将转子磁极位置信号变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定顺序导通,定子相电流随转子位置的变化而按一定的顺序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。直流无刷电动机的原理框图如图2所示。

图2 直流无刷电动机的原理框图
1.2 无传感器控制技术
高性能直流无刷电动机运行控制系统需要精确检测磁位置以实现磁场定向控制,一般采用光电编码器或旋转变压器等机械传感器。然而传感器体积大,安装不方便,并且生产成本高。基于这些不利因素,这就要求研究无传感器的控制方法[3]。通常是利用直流无刷电动机本体在运行时,各相定子绕组自身自然存在的反电动势作为转子磁极位置的反馈信号来代替原有位置传感器的作用,参与直流无刷电动机的闭环控制运行。直流无刷电动机起动后,其转子永久磁铁所产生的磁通要切割定子绕组而产生反电动势E(E=BLwrr,由于wr≠0,故只有磁场B为零时,E才为零),其大小正比于直流无刷电动机的转速及其气隙中的磁感应强度B。当转子磁铁的极性改变时,反电动势的波形的正负也随着改变。所以,只要测出反电动势波形的过零点,就可以确定转子磁铁精确位置,并以此来控制直流无刷电动机的换相。
2 无感无刷直流电动机技术在密度仪器上的应用
2.1 电动机控制电路的设计
直流无刷电动机起动、运转、停止都较单相交流电动机复杂,需要专门设计电路板[4],来控制电动机,如图3和图4所示。
为了起动电动机,测井操作员发送电动机命令,通过电缆送入数传仪器,然后再将命令送入密度仪器的通讯板。通讯板接下来发布一系列命令。通讯板第一个命令是让地面直流电源接入电动机控制板;第二个命令是电动机转向命令,控制开腿或者关腿;第三个命令是电动机使能信号,起动电动机控制板上的U1内的序列发生器。

图3 电动机控制电路A部分
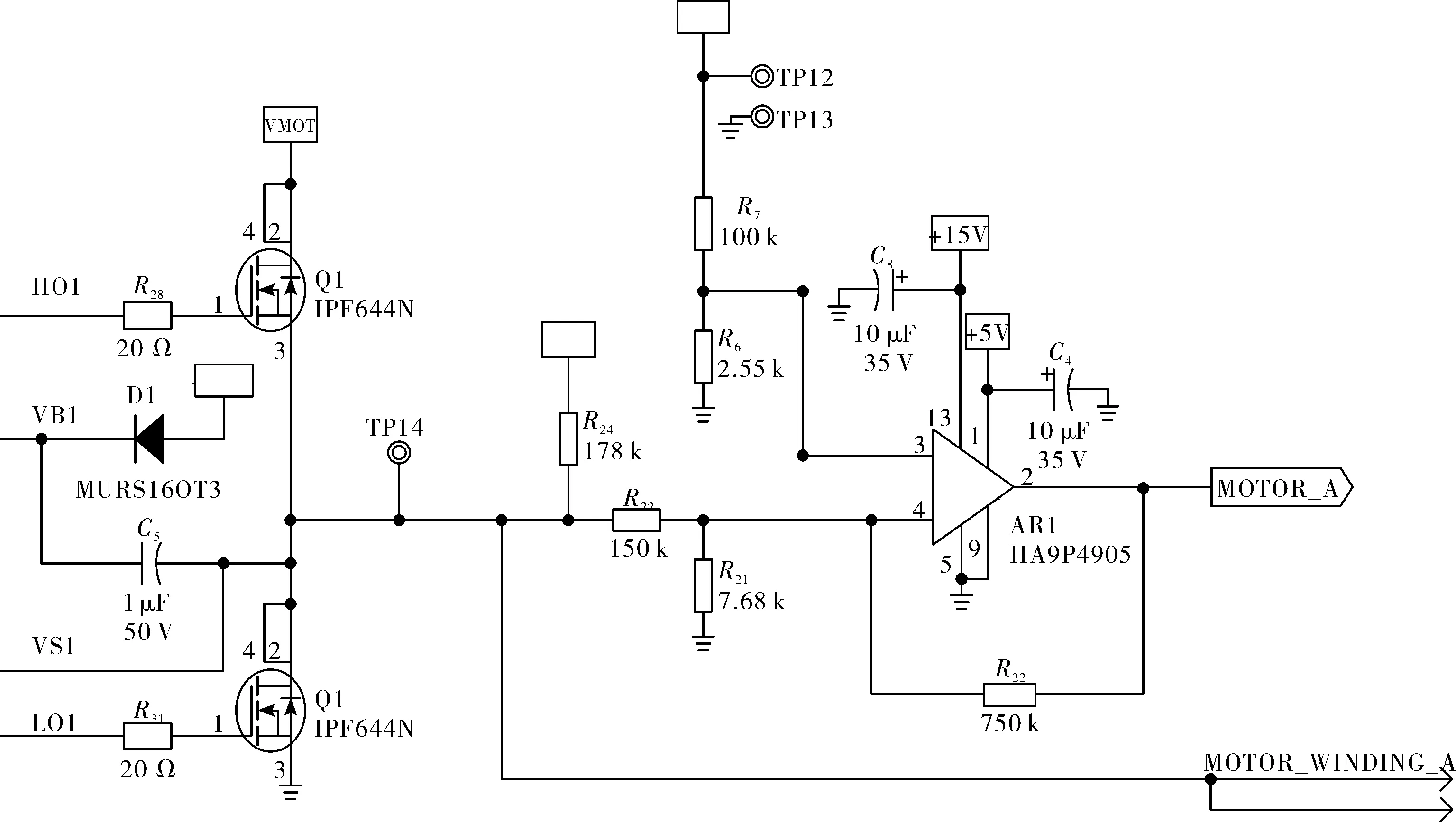
图4 电动机控制电路B部分
U1是CPLD可编程逻辑器件,保持时序逻辑让电动机旋转。U2是电平转换器,转换U1输出逻辑电平到合适的电平,以驱动场效应开关管Q1、Q2、Q3、Q4、Q5、Q6。AR1是四重比较器,四重比较器中的有三个部分用来感应无励磁电动机绕组的电压。通过拿无励磁电动机绕组上的电压与参考电压进行比较,当电动机有某个确定的旋转位置时,比较器输出状态发生改变,以维持电动机旋转。
值得注意的是,在设计中使用了软件起动法[5]。在电动机静止和低速运动时,其反电动势为零或极低,无法检测,因此采用外同步起动的方法。在电动机起动时,先在某相加电压,然后检测过零点;若检测到过零点,就提前切换;如果检测不到就延时一段时间再切换。以此来使电动机转速逐渐升高,当反电动势足够大时,则进入正常运转方式。
2.2 应用效果分析
当未接入电动机,电动机控制板输出空载的前提下,测量三相输出MOTOR WINDING_A、MOTOR WINDING_B、MOTOR WINDING_C,波形如图5所示。
当接入电动机后,电动机控制板输出带负载的前提下,测量三相输出MOTOR WINDING_A、MOTOR WINDING_B、MOTOR WINDING_C,波形如图6所示。
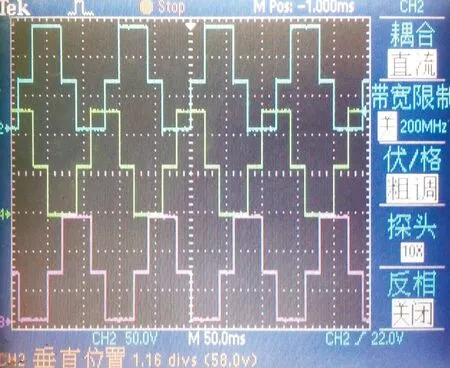
图5 未接电动机三相测量波形
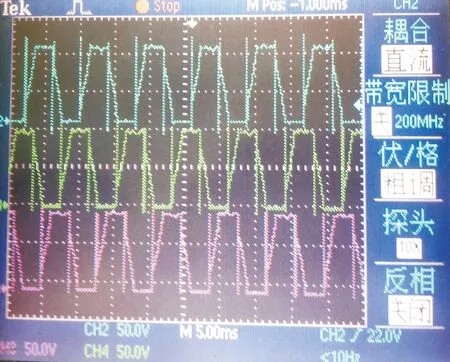
图6 接电动机三相测量波形
对照图5图6,接电动机与未接电动机时,三相输出波形存在明显的区别:未接电动机时,三相输出方波,测量的是输入电势,而在接电动机时,三相输出梯形波,测量的是感生电动势。原因在于,无感无刷直流电动机利用第三相的感生电动势去测量转子的位置。在任意两相通电期间,如果我们去测量第三相上的电压,会发现其间有一个从正到负(或者从负到正)的变化过程。其等效电路图如图7所示。

图7 电动机等效电路图
这里需要说明一下的是,在AB相通电期间,不只是线圈CC′上产生感生电动势,其实AA′和BB′也在切割磁力线,也都会产生感生电动势,其电动势方向与外加的130 V电源相反,所以叫“反向感生电动势”(BEMF);不同的是在AB相通电期间,CC′的感生电动势会整个换一个方向,也即所谓的“过零点”。
也就是说,在AB相通电期间,只要一直监测电动机的C引线的电压,一旦发现它低于共同联结点的电压,就说明转子已转过30°到达了中间的位置,只要再等30°就可以换相了。同理,当电动机处于AC相通电时,监测的是B相输出电压;当电动机处于BC相通电时,监测的是A相输出电压。接下来的CA,CB相通电情况也类似,不再赘述。 无论从波形图来看,还是实践证明,无感无刷直流电动机在密度仪器上运行平稳可靠。
3 结 论
从实践来看,密度仪器使用无感无刷直流电动机取代单相交流电动机已是很大的进步,省去了大电容,操作更加安全,尤其利用第三相的感生电动势,省略了位置传感器,整套系统结构更简单,运行更加稳定,故障率更低。然而,也有不足的地方需要改善,起动程序复杂,并且起动的时候可控性较差,要达到一定转速后才变得可控,除此以外,电动机无法调速,并不能做到精细控制,但这并不影响密度仪器的开关腿。
