无人机在获取高精度DEM数据中高度设计的研究
2018-09-11张国明田行宜王盈莹廖雪言白洪阳
张国明,田行宜,王盈莹,廖雪言,白洪阳,辛 星
(1. 兰州大学 土木工程与力学学院,甘肃 兰州 730000; 2. 兰州大学 资源环境学院,甘肃 兰州 730000)
0 前 言
随着计算机以及遥感技术的发展,越来越多的人追求高精度的DEM数据以获得丰富而精确的信息,从而便于地质灾害的研究与监控。如雷达技术,卫星影像,三维激光扫描仪,固定翼无人机航测等技术的应用[1-3],这些技术被广泛的用在大规模的野外地质调查中,虽然能获得了较高分辨率的DEM数据,但是这些技术的共同特点就是花费较大,时间周期较长。而且对于小规模的地质灾害调查,在其局部微小地质特征的识别方面,计算机的自动识别算法尚不能满要求,这时就需要人的视觉判,上述方法所获得的DEM数据基本不能满足要求。多旋翼无人机在小区域的地质调查中,有迅速、高效、高精度、低成本的优点。中国是个地质灾害多发的国家[4]。特别是近几年来随着城市化进程的加快,人类活动增强,水电工程兴建引起了一系列的地质灾害,如滑坡、泥石流、冲沟侵蚀等,对人民群众的生命和财产安全构成严重威胁。一种快速的地质灾害调查、监控方法或者是手段是必要的,无人机航测技术在这方面表现出了优良的性能和极大的优势,针对区域小规模地质灾害可以快速的获取地面数据,以做研究和应对措施。如无人机在滑坡、山崩、冲沟侵蚀等方面的应用表现出了极大的优势。那么如何通过合的飞行高度设计以及正确的操作使无人机能够快速、高效地获取高精度DEM数据是亟待解决的。
影响无人机数据据精度的因素是多方面的[5]。如飞行高度、照片重叠度、镜头参数、光照因素、后期航片处理、以及操作者的熟练度。本文主要有两个研究目标:第1个是如何根据目标DEM数据分辨率进行合理的飞行高度设计。第2个是完成DEM数据应用可靠性的评价。
1 研究区域
为了探究无人机测量精度以及飞行高度对数据精度的影响,经过调研我们选择校园广场的一个小区域作为实验区域。该区域台阶的数量较多,且单个台阶高在40 cm左右,尺度较小,剖面突变频繁且较规律,外形变化较大。利用DEM数据获取较为精确的台阶剖面图对其精度有着较高的要求。
2 试验材料方法
2.1 航测系统的介绍
一个无人机测量系统一般包括飞控、机架、动力系统、遥控器、相机、地面站,除此之外无人机飞行器可以搭载多种传感器来采集数据。
该研究区域的航空勘测使用了大疆精灵3 s,一种消费级的四旋翼无人机。相机具体参数详见表1。

表1 相机具体参数 mm
2.2 高度设计试验
在遥感中,地面分辨率(GSD)反应了影像能有差别地区分开两个相邻地物的最小距离的能力。飞行高度等参数和GSD之间存在着一定的关系。为了获得满足研究所需要的高分辨率DEM数据,在飞行前了解GSD的计算有助于我们在飞行前合理设计飞行高度。
(1)
(2)
(3)
式中,GSD为地面分辨率,m;μ为像素尺寸,mm;W是传感器的宽度,mm;Sw是每张航片宽度上的像素数;H是飞行高度,m;F是焦距,mm。
GSD=k×H
(4)
代入具体参数,我们可以得到无人机大疆精灵3 s下的k值:k=3.281 163×10-4。
该理论式是基于单张航片得出的,而DEM数据是由多张有着一定重合度的航片基于计算机的自动识别算法组合而的。那么此时理论公式是否适合DEM分辨率的计算,也就是能否在飞行高度的设计上提供一定的参考价值,这时需要必要的试验。基于该问题我们在其他参数设计合理的情况下,飞行高度为25.1 m的条件下对实验区域展开了航测。为了节省时间成本航片格式采用GPEG的格式,先人的研究已经证明JPEG压缩对DEM的精度几乎没有影响。
飞行结束获得航片后,经过后期数据处理,我们获得了试验区域的正射影像和DEM展示图(图1)。
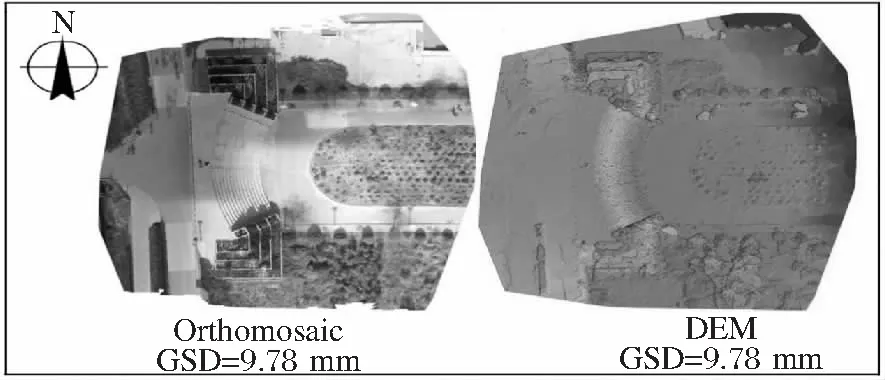
图1 试验区域的正射影像和DEM
由式(4)以及k值可以得到:
GSD=k×H=3.281 163×10-4×25.1=0.008 23 m=8.23 mm
而实际GSD值为9.78 mm,有一定的差距。分析可知高度不是很合适,因为设计的飞行高度是相对于起飞点的高度,在飞行过程由于地表的起伏变化,高度是会不断变化的。
在以上算式中我们直接取无人机初始设置飞行高度进行计算,理论计算的GSD值与实测的有一定的误差。考虑到DEM以及正射影像是由航片经过计算机自动算法合成的,我们尝试取无人机相对地面的平均高度H3进行计算验证。
H1=25.1 m,实测H2=5.723 m,那么可得H3=27.961 5 m,由式(4)可得GSD=9.174 624 mm。此时的分辨率理论计算值与实际值相差为:9.78-9.174 624=0.605 376 mm,约为0.6 mm。说明式(4)计算方法有一定的指导价值,但是需要注意H是无人机相对于地面的平均高度。
2.3 实测精度试验
此次获得的试验区域的DEM数据精度为9.78 mm,那么基于消费级无人机大疆精灵3 s所获得DEM数据是否可以运用在实际的工作中,为了确定数据的可靠性,我们在航测前标定的剖面线位置处做了剖面分析,得到该位置处的剖面图,同时我们也利用传统的方法(全站仪)测量得到了该位置处的剖面图(图2)。
从俩次剖面对比图中可以发现,实测和基于无人机数据所得的剖面图在形态上是相近的,数值上相差甚微,说明了无人获取高精度地形数据的可靠性。
3 结 论
1)飞行高度不但直接影响着数据的分辨率,同时也影响着飞行时间。飞行高度越高飞行所需要时间越短,但是数据分辨率也越低。但当飞行高度取得很低会大幅度的增加时间成本,所以合理的规划飞行高度是非常有必要的。本文给出的计算方法,具有重要的参考价值,可以根据目标DEM数据的分辨率较为准确的获得飞行高度。但是注意在选取H的时候要取其平均高度。如此不但能获得所需精度的数据同时也能保证工作效率。
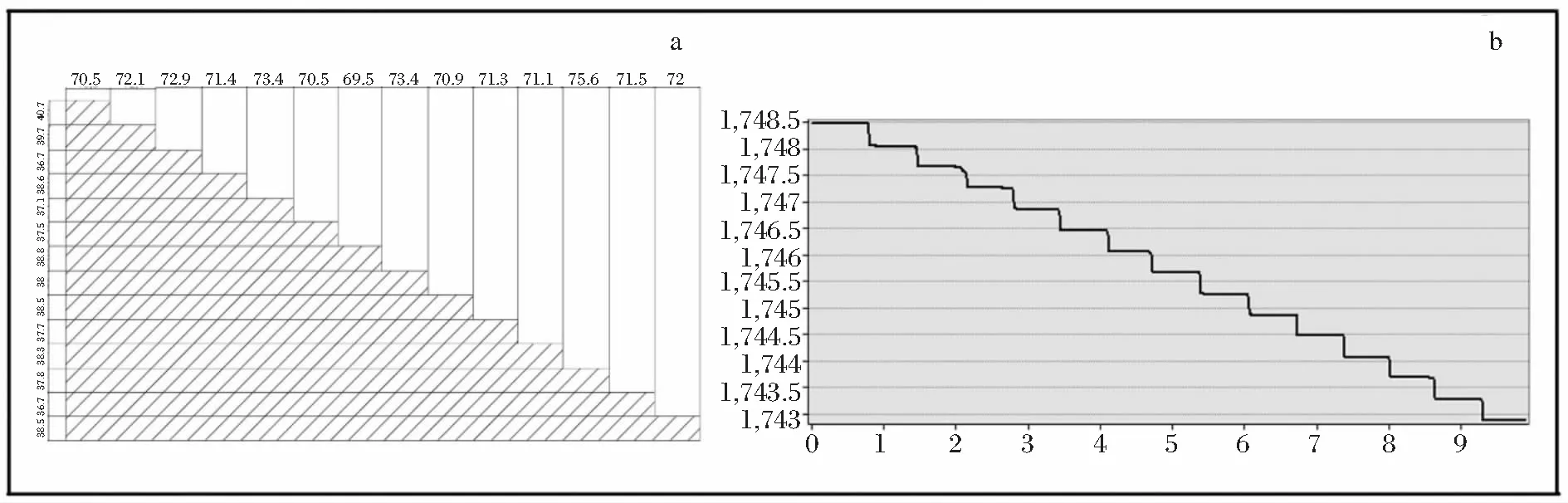
(a)传统方法(全站仪)所得的剖面;(b)无人机数据所获得剖面
2)本文同时也对其它飞行参数的设计提供了参考。天气状况是影响数据精度的一大要素。主要通过影响航片的质量以及GPS的定位来影响DEM数据的精度。在进行工作的时候,尽量选取目标区域能较为均匀的受到光照的条件,避免光照的直射。在风速的选择上风速越小越好,这样小型的无人机在工作的时候较为稳定,同时较为安全。尽量避免雾霾以及阴天等恶略气候条件,这样的条件不但影响着GPS定位的精度也会增加危险系数。在主航线上图像重复率超过80%,主航线间的图像重复率超过60%,数据的精度可以得到有效的保证,根据目标区域的面积的可以适当的调整。
3)消费级无人机在小规模区域DEM数据获取的应用具有一定可靠性。
