多波束测深技术在黄河床面形态观测中的应用
2018-09-10马坤王平王俊雷王耀兴刘鹏飞郭帅有
马坤 王平 王俊雷 王耀兴 刘鹏飞 郭帅有

摘要:根据R2SONIC多波束测深系统的测量原理及测量技术要求,结合黄河下游游荡型河道的水沙及地形特点,采用差分GPS定位导航、R2SONIC水深测量,于2016年6-7月开展了黄河下游花园口河段的河床形态测量,取得了主河槽内长5km、宽50m的观测带在河道流量为800~1200m3/s时的河床床面形态数据。结果表明:采集的数据经软件后处理后能够达到较高的精度,可以给出黄河下游床面形态的三维立体图形,直观反映床面形态特征,同时为黄河下游动床阻力及输沙能力的研究提供基础数据;花园口河段床面形态为复式沙垄,即存在一个波长800~1200m、波高3m左右的一个大沙垄,其他小沙垄附着在大沙垄上。
关键词:多波束测深系统;测量;床面形态;花园口河段;黄河下游
中图分类号:P332.3;TV882.1 文献标志码:A doi:10.3969/j.issn.1000-1379.2018.02.004
1 概述
多波束测深系统服务于水下地形测量,具有精度高、测量速度快、成图效率和自动化程度高等优势,将水下地形测量技术从“点”“线”扩展到“面”,不仅如此,还能进一步发展至自动化成图,乃至将水下地形以直观的形式呈现在人们眼前,使水下地形测量技术发展到更高水平[1]。多波束测深系统已广泛应用于海洋、河道等对象的水深或地形测量。利用多波束测深进行海底数字地形模型的构建工作,能够充分满足大区域、大比例尺制图的需要,并且可以有效地提高多波束数据处理的效率、精度和质量[2]。如多波束测深系统曾在我国东海进行了海底地形的测量,得到了无缝且精细的海图[3];在长江镇扬河段和畅洲左汉潜坝工程区域,利用多波束进行了全覆盖测量,扫描的三维图形能更加细致、全面和准确地反映水下的实际情况[4];多波束系统在长江口深水航道和湛江港建设航道疏浚工程进行的水下地形测量也取得了较好的效果[5]。
黄河下游为著名的游荡型河道,河道宽浅散乱,因此黄河下游床面形态的观测十分困难。20世纪50年代末,黄委花园口河床演变测绘队曾利用测深杆在黄河下游花园口河段进行了沙垄观测,但是受观测条件及观测技术的限制,获得的观测资料很少且不系统,难以完全反映花园口河段床面形态的特征。R2SONIC多波束测深系统是先进的测深技术,目前尚未在黄河下游游荡型河段得到应用。为研究不同水流条件下黄河下游床面形态特征及相应的输沙能力,笔者利用R2SONIC多波束测深系统,在花园口河段进行了床面形态测量。
2 R2SONIC多波束测深系统简介
2.1 系统组成
多波束测深系统(组成见图1)主要包含有多波束声学系统、辅助设备、工作站3个子系统。多波束声学系统包括多波束发射接收换能器阵(声纳探头)和信号控制处理电子系统。R2SONIC 2024换能器内含发射与接收换能器,工作频率为200~400kHz,发射波束角(脚印分辨率)≤1°,接收波束角≤0.5°,发射频率为50Ping/s。垂直航迹方向波束宽度:发射为140°(165°可选),接收为0.5°;沿航迹方向波束宽度:发射为1°,接收为27°,量程不小于500m,测深分辨率为6mm。一体化罗经和运动传感器内含3个光纤陀螺和3个加速度计,可以给出载体的六自由度运动姿态以及真北方位角,内置有自适应升沉预测滤波器,在任何情况下均能实时提供精确、可靠的运动姿态数据,一体化罗经和运动传感器艏向不大于0.1°,分辨率为0.01°;横/纵摇不大于0.01°,分辨率为0.001°,涌浪补偿精度不大于5cm或满量程的5%。
辅助设备包括提供大地坐标的GPS卫星定位系统,测量船横摇、纵摇、艏向、升沉数据等的传感器,所测水域声速剖面信息的声速剖面仪等。工作站主要包含数据的采集、控制、后期处理、显示和输出软件等[6]。
2.2 多波束测深原理
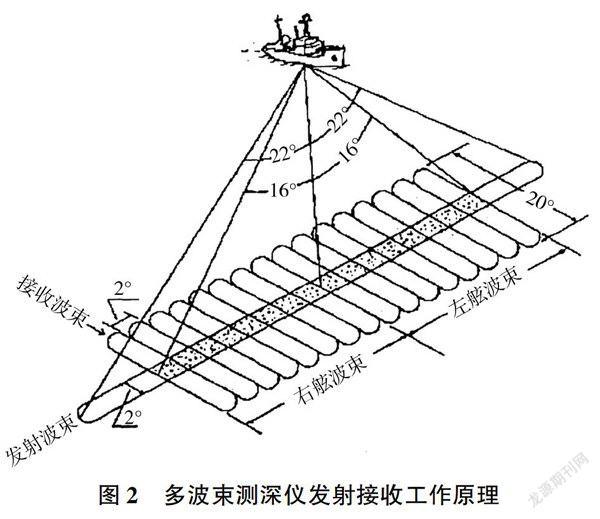
多波束测深系统利用回声测深原理,通过换能器的发射波束模块在水中发射声波,接收波束模块获取相应的回波,进而得到从发射声波到回波的时间,然后利用时间来计算水深。多波束测深原理见图2,发射波束以船为中轴线,左右对称呈扇形发射,并且垂直船航行方向;接收部分平行船航行方向,同样左右对称,接收部分略小于发射部分。两两叠加后形成一定数量的波束脚印[6]。
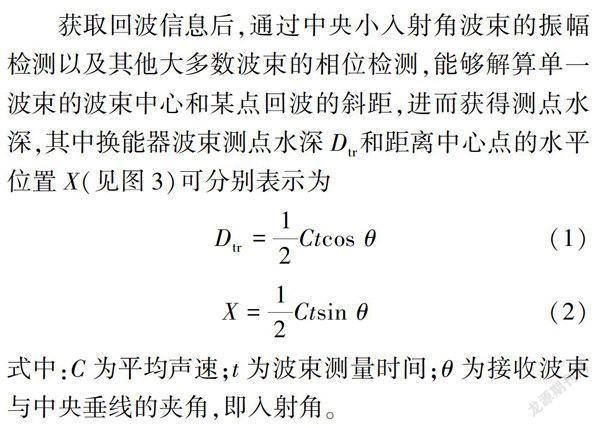
获取回波信息后,通过中央小人射角波束的振幅检测以及其他大多数波束的相位检测,能够解算单一波束的波束中心和某点回波的斜距,进而获得测点水深,其中换能器波束测点水深Dtr和距离中心点的水平位置X(见图3)可分别表示为式中:C为平均声速;t为波束测量时间;θ为接收波束与中央垂线的夹角,即入射角。
多波束测深系统通过发射波束与接收波束,利用往返回波的时间确定斜距并得到精确的水深数据,进而在辅助测量系统GPS的帮助下获得水下波束的空间位置。
3 黄河下游花园口河段床面形态的测量方案
黄河下游花园口附近河段為典型的游荡型河段,花园口水文站是国家基本水文站,在测量过程中可及时掌握水流流量、含沙量等水沙条件及河道地形条件,调整测量船的运行航线,提高测量效率,也有利于床面演变规律的研究。本次所选测量河段为花园口断面至马庄渠首闸附近约5km长的河段,具体位置见图4。
3.1 多波束测深系统的安装与调试
多波束测深系统、测量船及GPS系统的安装、调试是保证测量顺利进行及取得可靠数据的关键,应合理有序地设计换能器、一体化光纤罗经和运动传感器、GPS接收机天线的位置。考虑到观测河段水浅沙多,换能器安装于船舷一侧并固定好,以免产生抖动造成测量数据质量下降。一体化光纤罗经安装在靠近测量船重心位置处并固定好,指示方向应与船首方向一致,远离导磁物质或易磁化的物质。为了防止船舶摇摆幅度过大影响传感器的精度,将一体化光纤罗经和运动传感器固定在测量船中心处。GPS接收机天线安装在船舶高处且视野开阔的地方,安装要稳固,避免船舶姿态变化使其产生位移。全部设备完成安装后,需要精确地测量出各设备之间的距离,推算它们在整个系统中的相对位置,从而将这些设备置于同一个坐标系下,以完成后处理的统一解算。
多波束测深系统调试包括子系统的运行调试以及航行中的调试。运行调试包括检查电缆的连接及电源输出电压信号的稳定性和数据的通信情况等,可在测船静止条件下进行。航行中的调试就要对多波束测深系统的各种安装误差进行校正,包括换能器探头以及一体化罗经和运动传感器的安装偏差等。校正工作需要在两种不同的水底地形上进行特定的测量,进行横摇、纵摇、艏摇等系统参数的校正,各个系统误差的校正方法是采集特定要求的测线数据,在Caris软件中进行处理,得到系统的横摇、纵摇、艏摇数据,校正方法见表1。
3.2 多波束测深系统测量数据后处理
多波束数据采集包括水深、定位、姿态数据、水下声速数据等,数据采集在QINSY軟件中完成,该软件运行在Windows平台下,界面友好,操作便捷。多波束测深系统测量获得的数据需要体现在地理坐标系下。
多波束测深系统利用回声进行测量水深,水越浅泥沙含量越大,越容易在采集数据时形成噪点。因此,必须对测量的原始数据进行去噪。噪声处理主要有手动滤波和自动滤波两种方式,手动滤波采用目视解译法,处理效果好,但是效率低下;自动滤波效率高,但是处理效果不理想。本文采用自动滤波加手动滤波的方式来处理噪声。多波束测深系统的坐标系统有测船坐标系统和地理坐标系统两种,测船坐标系统就是将各个子系统的相对位置归算在一起,测船坐标系与地理坐标系可以相互转化,实现测船坐标系下相应测点坐标及高程的计算。
数据处理主要在Caris软件中进行,可以实现多波束数据分析、滤波、数据合并,生成水底地形曲面图等,得到完整的水深分布数据,并可以输出多种数据格式的数字地形图。
4 观测结果
花园口段河底地形测量工作于2016年6月28-7月7日进行,实测期河道流量为800~1200m3/s,共测量4次,每次均获得了约50m河宽的水深分布图。图5为2016年7月7日观测的局部河段水深分布图。
从图5可以看出,在花园口站流量为800~1200m3/s时,测量河段床面形态主要表现为不均匀的沙垄,沙垄尺度沿河流方向及断面方向的分布都不均匀,沙垄波长一般在10~50m,波高0.5~1.2m。从观测河段的整体纵剖面来看,花园口河段床面形态为复式沙垄,即存在一个波长800~1200m、波高3m左右的一个大沙垄,而上述小尺度沙垄附着在这一大沙垄上。这是第一次在黄河上发现复式沙垄特征,是否具有普遍性仍需进一步观测及论证。1959年在花园口河段利用测深杆观测到的沙垄,波高一般不超过2m,波长一般为数百米,有时也可达1km以上[7]。目前来看,这些观测反映的应该是2016年所观测到的大沙垄。本次观测到的黄河下游花园口河段的床面特征与已有观测结果基本一致,但是本次观测提供了更多的床面形态信息,结果也更为可靠。
5 结语
多波束测深系统可在黄河冲积性河流进行床面形态的测量。采集的数据经软件后处理后能够达到较高的精度,可以给出黄河下游床面形态的三维立体图形,直观反映床面形态特征,如波高、波长及沙波的运动速度,为黄河下游动床阻力及输沙能力的研究提供翔实的数据支撑。同时,也可进行河道整治工程冲刷尺度的量测,为黄河防汛抢险等提供基础数据。
黄河下游水浅滩多,部分区域目前尚无法进行测量。如何利用多波束测深系统进行黄河浅水区域的测量,将是今后的研究方向。
参考文献:
[1]黄漠涛,翟国君,欧阳永忠,等.多波束与单波束测深数据的融合处理技术[J].测绘学报,2001,30(4):299-302.
[2]高金耀,金翔龙,吴自银.多波束数据的海底数字地形模型构建[J].海洋通报,2003,22(1):30-38.
[3]阳凡林,李家彪,吴自银,等.多波束测深瞬时姿态误差的改正方法[J].测绘学报,2009,38(5):450-456.
[4]赵钢,王冬梅,黄俊友,等.多波束与单波束测深技术在水下工程中的应用比较研究[J].长江科学院院报,2010,27(2):20-23.
[5]张伟.多波束测深系统在水下地形测量中的应用研究[D].北京:中国地质大学,2009;43-51.
[6]陆俊.多波束系统在水下探测中的应用[D].南京:河海大学,2006:9-20.
[7]钱宁,周文浩.黄河下游河床演变[M].北京:科学出版社,1965:65-68.
