建筑物三维重建点云数据配准方式研究
2018-09-10张亚山锋
张亚 山锋

摘 要:本文在介绍三维激光扫描技术点云数据配准方式的基础上,以某特征建筑物为例,分别采用三种方式从内外业数据采集、处理速度方面进行对比,并对配准后的点云数据精度进行分析。结果表明:基于特征点点云数据采集、处理速度快,基于标靶、测站点控制点的点云数据配准方式精度较高。
关键词:点云数据;数据采集;配准;对比分析
中图分类号:TP391.41文献标识码:A文章编号:1003-5168(2018)28-0037-02
Abstract: On the basis of introducing the registration method of point cloud data in 3D laser scanning technology, this paper took a characteristic building as an example, compared the data acquisition and processing speed in three ways, and analyzed the accuracy of point cloud data after registration. The results showed that the data acquisition and processing speed based on feature point cloud was fast, and the registration method based on target and control point of measurement station had high precision.
Keywords: point cloud data;data collection;registration;comparative analysis
近年來,三维激光扫描技术被广泛应用于建筑物三维重建中。但是,因其在外业数据采集过程中受到扫描仪的视场限制,不能在一个测站对所有点云数据进行扫描,只能多个测站进行扫描,然后把每个测站的点云数据进行配准[1]。本文从三维激光扫描技术的三种点云数据的采集方式出发,通过试验分析,探讨不同点云点数据采集方式下的点云数据采集速度、配准精度,为点云数据的后续处理提供参考。
1 研究方案
1.1 研究场地选取
本次研究场地是某校园内的一栋建筑,该建筑形状规则,易于选取特征点和特征边,且建筑物周围比较空旷,利于架设扫描仪和布设控制网。
1.2 仪器设备的选取
本次研究采用HDS ScanStation 2三维激光扫描仪对建筑物进行点云数据采集,HDS ScanStation 2三维激光扫描仪扫描视场为360°×270°,具有测站定向功能,数据采集和配准软件为Cyclone,标靶为球形标靶。另外,还配有索佳250X全站仪及棱镜、钢尺等工具。
2 点云数据采集
本次试验的数据采集根据研究目的分三次进行扫描,每次扫描为三个测站,每站既扫描裙楼部分又扫描主楼部分,扫描分辨率设置为1cm,并且三次扫描的范围一致。
2.1 基于特征点的扫描
基于特征点的扫描是把扫描仪架设在建筑物周围通过获取的影像来确定每个测站扫描的范围,设置分辨率进行扫描,并在下一测站扫描过程中对前一测站的扫描区域进行1/3的重叠。这种方式外业数据采集速度较快,扫描仪安置要求不高,但根据建筑物上的特征点进行数据配准时要求每站扫描过程都要有一定的点云数据重叠且配准精度稍差。
2.2 基于标靶的扫描
基于标靶的扫描是根据两个测站间共同的标靶来进行数据配准,需要在相邻两站的扫描过程中对同一组标靶进行扫描。在扫描过程中,首先要确定每个测站的扫描范围,然后在相邻两个测站间设置三个球形标靶,并保证两个测站都能扫描到设置的球形标靶,然后对三个球形标靶进行扫描,球形标靶扫描的分辨率为2mm,以提高标靶拟合精度。扫描完标靶之后再对建筑进行扫描,下一个测站也是先扫描前一测站的三个标靶,然后再对建筑物进行扫描。这种方式的外业数据采集速度稍慢,但精度较高。
2.3 基于测站控制点的扫描
基于测站控制点的扫描是依据控制点作为约束条件进行数据配准的,该方式分两步进行。第一步,用全站仪对布设控制点进行水平角度、垂直角度和边长测量,然后进行近似平差得到控制点三维坐标;第二步,在控制点上架设扫描仪,对中、整平,然后在后视点上架设标靶,量取扫描仪和标靶高度,在操作软件上输入测站点数据和后视点数据,使用扫描仪的定向功能完成测站定向,设定扫描范围并获取数据。这种方式外业数据采集速度最慢。
3 点云数据配准
3.1 基于特征点的点云数据配准
三维激光扫描仪通过这种方式进行点云数据采集时,获得的点云数据全部处于每个测站坐标系中,基于特征点的点云数据配准则是根据不同测站间重叠部分的同名点来进行,通过同名点来求解不同测站坐标系间的转换参数,完成不同测站间的坐标转换。首先,把两个相邻测站的点云数据导入配准窗口,在两个配准窗口选择3~4个同名点,然后通过软件进行配准计算,得到配准后的点云数据,并显示配准精度。这种配准方式配准速度慢,所选取的同名点也并非是真正意义上的同名点,会影响配准精度。
3.2 基于标靶的点云数据配准
基于标靶的点云数据获取每个测站的点云数据也处于每个测站坐标系中。如果要进行配准,就需要选取相邻两个测站区域中共同的三个标靶,通过标靶中心点作为同名点来求解转换参数,完成坐标转换。首先,运用软件对两个相邻测站的三个标靶进行拟合,通过拟合获得标靶中心,并在两个测站对同一个标靶进行相同的编号,然后通过软件进行不同测站点云数据坐标转换,得到配准后的点云数据。这种配准方式内业数据配准速度较慢,但所选取的同名点相对于手动选取的同名点来说自动化程度高。
3.3 基于测站控制点的点云数据配准
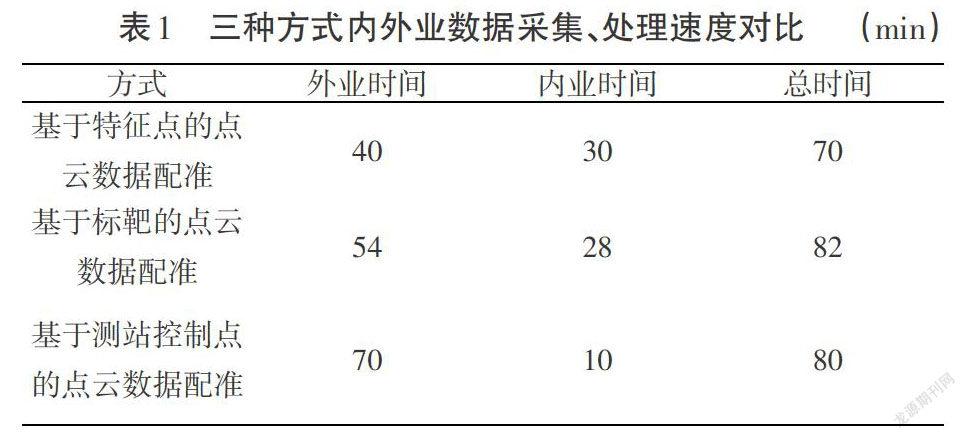
由于该方式已经在建筑物周围布设了控制网,因此,在扫描前已经对扫描仪进行测站定向,每个测站获取的点云数据在扫描过程中已经统一到所布设的控制网坐标系中,所以,其点云配准的实质就是在Cyclone软件中把各个测站的点云数据进行统一的过程。这种方式内业数据配准速度最快,精度相对较高。三种方式内外业数据采集、处理速度对比结果见表1。
4 点云数据配准精度分析
通过Cyclone软件多次对三种方式获取的点云数据进行配准试验。三个测站软件配准后的精度显示,基于特征点的点云数据配准精度分别为11mm和10mm;基于标靶的点云数据配准精度分别为3mm和4mm;基于测站控制点的点云数据配准精度分别为3mm和3mm。
本次试验还选取了建筑物的特征边来进行对比分析,特征边的选择主要是建筑物的窗户、墙边等,共选取了四条特征边,其中两条位于第一测站和第二测站间,另外两条位于第二测站和第三测站间。首先,用钢尺、全站仪多次测量获得特征边的长度,然后通过软件量取三种方式下这些特征边的长度,并与钢尺、全站仪测量的长度进行对比,对比结果见表2。
通过数据对比分析可以得到,基于特征点的点云数据获取,外业时间最短,内业数据处理时间长且精度差;基于标靶的点云数据获取,外业时间稍慢,内业数据处理时间长,但精度高;基于测站控制点的点云数据获取,外业最慢,但是内业数据处理速度最快,精度高。
5 结论
本次试验选取特征建筑物为试验对象,运用三种数据采集、配准方式,从外业数据采集速度、点云数据配准精度等方面进行对比分析。通过分析数据得出三种方式在内外业上各自的优缺点,为今后的工作提供可参考、可选择的数据采集、配准方式。
参考文献:
[1]贾东峰,程效军,刘燕萍,等.地面三维激光扫描仪定向法[J].工程勘察,2014(10):60-65.
