无人机多目标协同飞行精度研究
2018-09-10马文良
马文良

无人机多目标飞行在执行复杂任务的性能和效率上比单架次高出许多,因此无人机多目标飞行已经成为无人机应用研究的热点问题。本文对影响无人机多目标协同飞行精度因素进行了分析,提出了利用协同点计算的辅助计算方法,对提高无人机多目标飞行协同精度起到辅助决策作用。
随着现代战场环境及作战任务越发复杂,对无人机执行任务的要求也越来越高,仅仅依靠单架无人机完成任务的缺陷已经十分明显,而对于无人机多目标飞行的需求正不断上升。无人机多目标飞行,即多架无人机为适应任务要求而进行的某种队形排列和任务分配的组织模式。和单架无人机相比,无人机多目标飞行可以将任务的执行效率大大提高,更好的满足任务需求,但在实际飞行中,无人机多目标协同飞行将受到某些因素的影响,进而协同飞行精度也随之受到影响。本文基于对影响无人机多目标协同飞行精度的因素进行分析,提出协同飞行辅助计算方法,在实际飞行中可及时对无人机进行适当调整,进而满足任务要求。
影响无人机多目标协同飞行精度的因素及分析
根据任务要求,无人机多目标飞行将会受到某些约束条件的限制,例如要求无人机之间保持固定距离、到达目标点的时间控制在一定范围内等,而影响无人机完成任务的因素有许多,其中主要包括环境因素、起飞时间间隔、转弯速度、飞行高度及无人机型号等。
环境因素
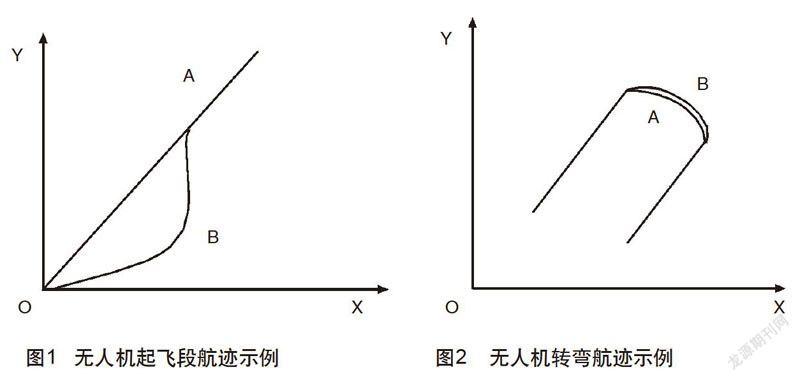
本文考虑的环境因素主要是风速及风向。无人机起飞对起飞地点的风速风向是有一定要求的,因此在起飞时要根据起飞地点的风速风向选择发射方向,这样就有可能产生无人机起飞段偏离预定航线的情况,与仿真计算产生了时间差,如果无人机选择在不同的地点起飞,在起飞段产生的时间差就更难估计,需要在起飞后进行及时调整,进而满足任务要求。如图1所示,直线A为无人机设计航线,在实际飞行中,受起飞地点的风速风向影响,无人机无法直接进入航线,只能以实际航线B飞行,如此就产生了时间差,需要在后续飞行过程中进行适当调整。
起飞时间间隔
在执行多目标飞行任务时,需要每架无人机按照预先设定的时间间隔起飞,然而在实际操作中,可能会受到人为因素、环境因素、无人机个体差异等影响,两架无人机之间的起飞时间间隔很难保证为预定的时间间隔,将会产生时间差,需要无人机在后续飞行过程中进行适当调整,尽快消除时间差的影响,满足任务要求。
转弯速度
无人机在空中飞行会受到空中风的影响,使得无人机在转弯时速度无法按照预定速度进行转弯,造成无人机转弯半径发生变化,实际飞行航线偏離预定航线,飞行时间会随之发生变化,如图2所示,预定航线为A,无人机受到影响转弯半径变大,实际航线为B,实际航线与预定航线产生偏差,飞行时间随之发生变化,进而影响无人机协同飞行。此外,无人机在转弯时姿态将发生较大变化,不宜对其进行调整,需要在无人机完成转弯且姿态平稳后进行及时调整。
飞行高度
随着无人机飞行高度的增加,其受到的升力、阻力及发动机效率将会发生较大变化,同时,不同高度空中风的速度与方向也会不同,使得实际飞行情况与理论航线及仿真计算结果有较大差距,因此,需要在实际飞行中需要及时观察无人机飞行速度,针对速度差距及时进行修正,进而满足多目标协同飞行要求。
无人机型号
依据任务要求,将对无人机协同飞行的型号进行要求,对要求不同型号无人机协同飞行时,在以上4点需要考虑外,还需要特别考虑不同型号无人机速度差异及速度调整难度的情况。在任务规划时针对无人机型号不同需认真考虑航线规划、起飞顺序、起飞间隔时间及在飞行过程中遇到突发情况对哪型无人机进行何种调整等。
无人机多目标协同飞行辅助计算方法
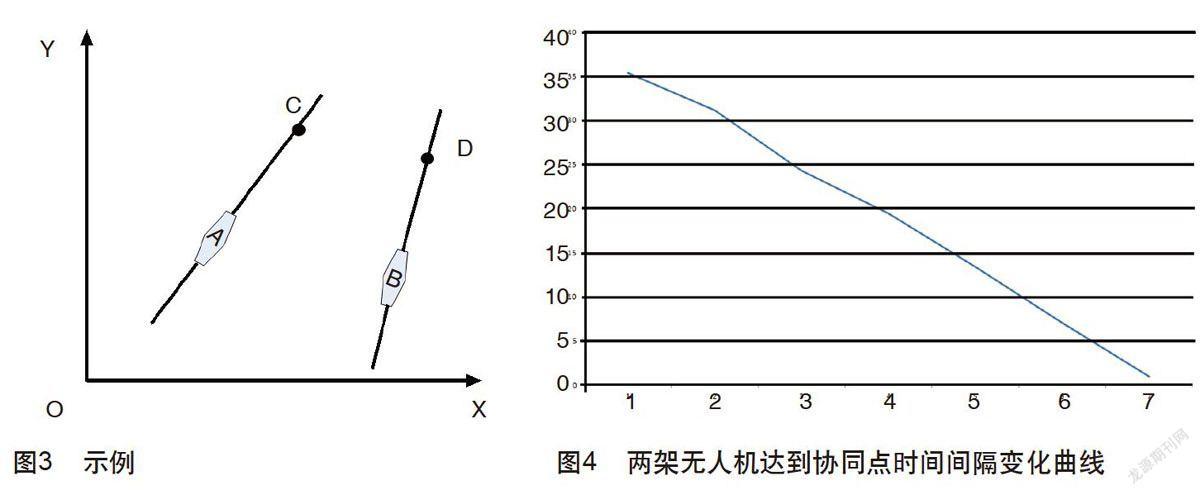
假设某任务要求无人机A与无人机B同时到达各自航线的C点与D点(如图3所示),在实际飞行过程中,无人机A与无人机B由于受到上述因素的影响,无法按照模拟仿真的情况进行协同飞行,这样就需要在无人机飞行过程中采取有效计算,有针对性的进行某些调整,进而消除无人机A与无人机B不协同的实际情况。
针对示例中提出的无人机受影响无法保持协同飞行的情况,采取在无人机到达目标点前增加协同点的办法,计算无人机到达协同点的时间差,对无人机速度进行调整,具体步骤如下:
(1)利用公式(1)计算无人机当前点与协同点之间的距离;
D=R*arccos[cos(βl)*(cosβ2)*
cos(αl-α2)+sin(βl)*sin(β2)]
(1)
其中,R为地球半径,(αl,β1)为无人机当前点坐标,(α2,β2)为协同点坐标。
(2)根据第一步中计算得到的距离及无人机航速分别计算两架无人机到达协同点的时间;
t=D/V
(2)
其中,V为无人机航速。
(3)计算两架无人机到达协同点的时间差,判断无人机到达协同点的先后顺序;
(4)根据无人机控制特点,对无人机速度进行调整;
(5)重复(1)一(4)的计算工作,直到满足协同飞行要求。
如图3所示,利用上述计算步骤,假设无人机A当前坐标为(123.01°,35.94°),无人机B当前坐标为(123.26°,35.88°),两架无人机当前速度为lOOm/s,协同点坐标为(123.41°,36.37°),要求无人机A与无人机B到达协同点的时间间隔小于1s。利用上述计算步骤进行仿真计算,假设无人机A速度保持不变,对无人机B进行速度调整,仿真结果如图4所示,最终两架无人机达到协同点的时间间隔为0.96s,满足要求。
增加协同点的方法可以判断无人机协同飞行情况,通过计算对无人机进行适当调整,将有效提高无人机多目标协同飞行精度,满足任务要求。
总结
本文对无人机多目标协同飞行进行了研究,对影响无人机多目标协同飞行精度的因素进行了分析,提出了利用协同点实时计算的辅助方法,可以判断无人机协同飞行情况,及时对无人机采取合理调整,使无人机协同飞行精度提高,圆满完成无人机多目标协同飞行任务。
