军用无人直升机发展展望
2018-09-10鞠成君宋永磊姬乐强
鞠成君 宋永磊 姬乐强
无人直升机以其技术特点和优势,其军事用途越来越受到重视。基于自主化、智能化、网络化程度的不断发展,提出了无人直升机未来军事应用前景,分析了无人直升机需要突破的关键技术,可为军用无人直升机的研制思路和发展目标提供建议。
信息化战争要求构建陆海空电多维一体、战略战役战术多层配置、多种手段配套的信息化武器装备体系。无人直升机平台通过搭载多种任务载荷,逐渐成为未来作战体系中重要的空中节点。
未来军事应用前景
为了加速无人直升机产业和军事用途的发展,世界主要国家都结合各自研究现状提出了相应的无人直升机发展路线和计划。
2005年,美国颁布了《无人机系统路线图》,该路线图中明确了多种类型无人直升机的发展计划。如,垂直起降战术无人机(VTUAV)计划、“深水”(IDS)计划、无人机武装旋翼机(UCAR)计划、建制无人机(OAV)计划、长航时计划、鸭式旋翼/机翼无人机(CRW)计划等;俄罗斯为了解决无人直升机发展的不足,启动了无人直升机系统(UHS)项目;法国武器装备总局制定了一项垂直起降无人机计划,用于代替临时战术无人机系统。欧洲其它国家,如瑞典、奥地利则将重心放在先进中小型无人直升机的自主研制。日本则主要研制具有长航时、多用途、微型化和超声速等特点无人直升机。韩国也制定了无人机发展计划,以求未来在世界无人机工业发展中处于领先地位。
与有人直升机相同,无人直升机在技术相对成熟后被率先应用于军事目的,如侦察、中继、测绘、电子战等。面对未来军事作战环境的复杂性,无人直升机单一作战使用方式已经不能满足未来军事作战需求,其作战样式开始向自主、协同、集群等作战方向发展。
无人直升机自主作战
随着无人直升机与人工智能结合越来越紧密,作战平台智能化水平也越来越高,无人直升机完全自主的作战样式在未来军事领域中将会占据主导地位。
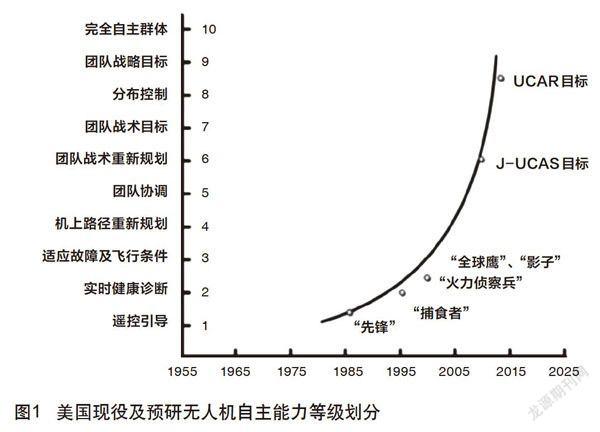
美国为实现“零伤亡”的作战预期,无人机装备部队的需求十分迫切。2000年,美国空军和海军相关作战研究室提出了“自主作战”概念。随后,美国在相继公布的无人机发展路线图中对自主作战等级进行了定义,且对现役、在研及预研的主要无人机系统设定了自主能力等级。
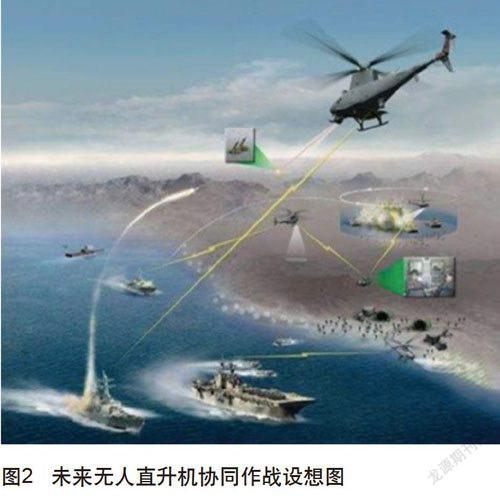
无人直升机协同作战
随着战场情势的多样化,无人直升机从独立自主作战发展为双机或者多机协同作战。采用无人直升机和有人机、岸基、舰船,甚至无人直升机之间相结合,实行混合编组、统一行动,实现协同作战和战场节奏的无缝对接。
为解决无人机单机作战任务能力和战场环境适应性差的问题,2000年,美军提出了无人机协同作战的设想,并开展了协同作战的关键技术研究。借鉴固定翼飞机的战场使用方式,未来无人直升机的作战模式势必也将向协同作战发展。
从协同作战模式来看,无人直升机协同作战主要分为无人机之间协同作战、有人/无人的协同作战。其中,无人机之间的协同作战,是指通过多架无人机的配合,实现作战目标的侦察、跟踪、打击、拦截等任务,协同完成较为复杂的战术任务。
无人直升机协同作战需通过协同控制系统,对不同任务的无人机进行作战数据和战术信息进行实时有效的互通;利用协同态势感知技术,将无人机携带的不同传感器所获取的战场信息进行数据融合,形成全战场态势的综合描述;基于协同目标分配技术,实时将任务目标和任务需求分配给具有多种作战约束条件的无人直升机;采用智能决策技术,依据战场态势变化,实时开展作战任务重规划和进行战术决策。
无人直升机集群作战
基于无人直升机自主和协同能力的发展,一种全新的应用模式呼之欲出,那就是在未来无人直升机应用方面的趋势——集群。
面对功能单一化,成本低廉化的无人直升机集群个体,敌军需付出其数十上百倍的防御成本,这使得无人直升机集群在未来战场中具有显著的成本优势和非常高的效费交换比。未来战场中,作战单元数量相比作战单元能力更具优势,将昂贵的多任务综合化作战系统分解为低廉的小作战单元,以完美的“群狼”战术形成规模优势,且不以某个或某几个单元的损失而降低任务完成能力。最终,实现复杂战场环境下的协同搜索、协同干扰、集群对抗和集群攻击等作战任务,并获取战场胜利。
关键技术
从技术和应用的角度来看,自主化、智能化和网络化是未来无人直升机发展的3大方向。然而,目前无人直升机的主要缺点是缺少对突发事件的应变能力,只能执行预定的任务,功能单一,且智能化程度较低。未来需要利用系统工程、网络化、智能化和五性综合设计等手段,突破无人直升机总体设计的多项关键技术,如飞行控制技术、测控技术、平台设计技术、动力技术、任务载荷技术等,以便充分发挥不受载人条件限制的任务适应性能力,从而可更好的满足未来军事作战的使用需求。尤其是随着无人直升机飞行控制技术、测控技术等关键技术的突破,使无人直升机具备较高的自主飞行能力。
飞行控制技术
飞行控制技术逐步实现智能感知和自适应,即不但具备按预定航路飞行、自动起降、自动返航能力,还要具备实时故障诊断、动态航路规划、自主目标选择及威胁规避等智能决策控制能力,并朝着集群自主控制方向发展。飞行控制技术的突破可以从以下几个主要方面考虑:
(1)从传感器、飞行控制计算机、执行机构以及飞行控制软件等多个方面着手,采用余度技术,实现高可靠性的无人直升机飞行控制;
(2)针对固有的通道耦合和多输入多输出的特性,采用多变量控制技术,实现无人直升机全包线飞行控制;
(3)基于故障检测和辨识,采用主动容错控制技术,充分利用控制系统的功能冗余来进行飞行控制律的重构,提高无人直升机对故障的适应能力;
(4)针对超视距或远程不确定的飞行环境,采用智能感知和识别,实时自主航线规划等自主飞行和控制技术,提高无人直升机的飞行环境的适应能力和对环境动态变化的快速响应能力,增强无人直升机的生存能力,提高任务成功率。
测控技术
测控技术应朝着通用化、高速化和网络化方向发展。指挥控制技术朝着开发性、互用性和公共性方向发展。测控技术的突破可以从以下几个主要方面考虑:
(1)针对无人直升机远程、贴地飞行通信需求,采用小型化卫通、空中/地面平台中继等技术,使无人直升机具有测控远程通信、卫星通信能力,实现无人直升机远程跨战区、贴地飞行测控能力;
(2)针对多机编队、多机联合作战、多站交接控制的需求,采用无线通信网络技术及目标任务分配与规划技术,实现多架无人直升机、多个地面控制站之间数据传输与信息共享,采用多目标任务分配与规划技术,实现无人直升机多机联合执行作战任务能力;
(3)采用目标识别与锁定、远程低延时机动遥控、攻击决策与毁伤评估等技术,实现无人直升机地面站远程作战测控和指挥能力,以满足无人直升机远程作战需求。
其他技术
在突破飞控测控两大关键技术的基础上,无人直升机技术发展还需开展平台设计技术、动力技术、任务载荷技术等方面進行进一步的深入研究。
(1)平台设计技术由“以平台为中心”向“以任务为中心”转变,并充分考虑作战使用的特殊要求,大量采用新材料和新技术,平台性能不断提升。
(2)动力技术朝着发动机功重比更高,耗油率更降低,可靠性更高,使用维护成本更低发展。
(3)任务载荷技术朝着高精度化、小型化、综合化、数字化方向发展。
展望
无人直升机作为未来“无人化”作战的利器,已经引起各国重视。目前,为满足未来军事化系统化作战和未来战场“零伤亡”的需求,世界研制无人直升机的主要国家都已制定了相应的发展路线,大力发展具备作战时效强、战场干扰、战场迷惑、低成本获取高收益等功能特点的无人直升机。最终,无人直升机自主作战、协同作战和集群作战必将主导未来战场。未来,随着无人直升机系统总体设计、飞控技术和测控技术等关键技术的突破,特别是无人直升机集群技术的逐渐成熟,以及计算机技术和网络技术在无人直升机上的广泛应用,无人直升机定会发挥其独特的魅力,在多用途、自主化、智能化和网络化等道路上越走越远,在军事应用领域得到更为广泛的应用空间。
