振动主动控制系统中作动器的优化配置
2018-09-10王海涛
王海涛
摘 要:将控制理论和振动理论结合起来对振动主动控制系统中的作动器位置进行优化设计,设计过程中同时考虑了系统的振动响应特性与可控性,优化了系统的整体性能。
关键词:控制理论;振动理论;作动器
中图分类号:TB535 文献标识码:A 文章编号:1003-5168(2018)08-0045-04
Optimization of Actuators Placement in Active Vibration Control System
WANG Haitao
(Naval Equipment Motor Repair Team of Qingdao,Qingdao Shandong 266021)
Abstract: In this paper, the control theory and vibration theory were combined to optimize the actuator position of the active vibration control system. In the design process, the vibration response characteristics and controllability of the system were taken into consideration, and the overall performance of the system was optimized.
Keywords: control theory;vibration theory;actuator
1 研究背景
振动主动控制装置对环境变化的适应性强,特别是对低频振动及周期性激励有很强的控制能力,且尺寸小,重量轻[1-3]。主动隔振技术的诸多优势吸引了众多国内外专家学者对此进行研究。其中,作动器的优化配置问题一直是研究的焦点。作动器配置的结果将直接决定系统的控制效率,影响系统的可控性和鲁棒性等[4,5]。目前,对振动主动控制系统的建模主要有两种方法:一种是从系统振动传递规律出发,以相似外推为基础的传统动力学方法,如导纳法等;另一种是从系统内部关系出发,以状态空间理论为基础的现代控制方法,如最优控制法等。前者的物理意义更清晰,便于使用隔振效率、功率流传递率等经典的振动控制评估标准对系统进行设计;而后者则更加科学地描述了系统的内部结构关系,有利于运用先进控制算法和判断系统的稳定性、可控度等。两种方法各具特色,如何将其有机结合起来,使振动主动控制系统的整体性能最优,成为目前研究的重要方向。
为此,本文将主动控制理论和振动理论结合起来,对系统中的作动器进行优化配置,同时考虑了系统的振动响应特性与可控性,克服了结构系统和控制系统独立设计的片面性,优化了系统的整体性能。
2 系统模型的建立
2.1 系统的动力学模型
以图1所示的简支梁为研究对象,其长度为l,质量为m,截面抗弯模量为EI,梁置于xoy平面内,在点xa=l/2处受到沿y方向的[fx,t=Psinωt]。
其弯曲振动的运动方程为:
[??x2EIx?2yx,t?x2+m?2yx,t?x2=fx,t-ux,t] (1)
控制采用xa处的速度信号作反馈。此时,作动器产生的主动力为:
[ux,t=gya] (2)
由此可求得梁的响应为:
[yx,t=n=1∞fx,t·φxa·φxmnω2n+jωgφxc-mnω2] (3)
速度导纳为:
[Hik=jωn=1∞φxi·φxkmnω2n+jωgφxc-mnω2] (4)
式中,[xi]表示激励力的位置,[xk]表示响应点的位置。如果[xk=xi],则式(4)表示的是点导纳;如果[xk≠xi],则式(4)表示传递导纳。[xc]表示作动器在梁上的位置,[mn]为梁的模态质量:
[mn=0lmφnxdx] (5)
其中,[φnx]是两端简支梁的第n阶振型函数:
[φnx=sinnπlx] (6)
[ωn]表示梁的第n阶固有频率:
[ωn=nπl2EIρA] (7)
2.2 系统的状态空间模型
状态空间法建立在系统时域描述基础上,即从系统的微分方程出发,获得其数学描述形式,再求得系统的状态空间描述。
如图1所示的简支梁系统运動微分方程可表示为:
[MWt+CWt+KWt=DFt+VUt] (8)
其中,[M]为质量矩阵,[C]为阻尼矩阵,[K]为刚度矩阵,[D]为扰动力矩阵,[V]为控制力矩阵,[Wt]、[Wt]、[Wt]分别为系统的加速度向量、速度向量和位移向量,[Ft]为扰动力向量,[Ut]为控制力向量。其表达式分别为:
[M=m1 0 0 0 00 m2 0 0 00 0 m3 0 00 0 0 … 00 0 0 0 mn] (9)
[C=m1dω21 0 0 … 0 0 m2dω22 0 … 0 0 0 m3dω23 … 0 … … … … 0 0 0 0 … mndω2n] (10)
[K=m1dω21 0 0 … 0 0 m2dω22 0 … 0 0 0 m3dω23 … 0 … … … … 0 0 0 0 … mndω2n] (11)
[D=V=φ1 0 0 … 00 φ2 0 0 00 0 φ3 0 00 0 0 … 00 0 0 0 φn] (12)
[Wt=x1 x2 x3 … xnT] (13)
[Ft=f f f …f] (14)
[Ut=u u u … u] (15)
取状态变量:[Xt=Wt,WtT],则可得系统的状态空间描述为:
[Xt=AXt+BUt+LFt] (16)
其中,A为系统矩阵,B为控制矩阵,L为扰动矩阵,其表达式分别为:
[A=I 0-M-1C -M-1K] (17)
[B=0M-1V] (18)
[L=0M-1D] (19)
3 优化准则及目标函数
在振动控制设计中,最关心的是通过振动控制使振动量级能获得多大程度的衰减。从能量角度研究振动控制问题并非自功率流方法始,但作为一种综合的系统动态特性评估指标,功率流观点的提出对柔性结构的振动控制具有重要意义。因此,本文利用传递到基础上的功率流为评价系统振动控制效果的指标,其可表示为:
[J1=12Ref2·Hii=ωP22n=1∝φxi·φxkmnω2n+jωgφxc-mnω2] (20)
近年来,有许多研究人员从控制理论出发,提出了各种不同的致动器优化配置准则,Sylvaine等提出了一种基于能量的方法[5],采用该方法可以很自然地研究整个动态模型的可控性和可观性。利用这种方法,结合前一节的状态方程,可以得到一个关于格兰姆矩阵特征值的准则:
[Wc=0∝eAτBBTeAττdτ] (21)
可控性概念实际上表达的是系统控制所需的代价,具体到振动控制对象而言,就是控制结构各阶模态所消耗的能量大小。我们可以从结构各阶模态的可控度入手,进而估算出系统的可控度,由模态可控度的定义可求得系统的模态可控度为:
[ρn=4φ8nxcm2nω6nsin2ωnT1-cosωnT2] (22)
其中,T为采样周期。
要使整个系统具有最大的可控度,则要求每阶模态下的系统具有最大可控度,即必须使每个[ρi]最大。然而,在作动器位置的选择上,各阶模态之间并不一致,某一阶模态的最佳作动器位置对另一阶模态可能并非最佳。因此,选择如式(23)所示的目标函数:
[J2=n=1∝wnρn] (23)
其中,[wn]为权因子,反映了各阶模态在系统响应中所占的比重,表示为:
[wn=1ω2n-ω2] (24)
从上述两个目标函数的意义不难看出,前者体现了系统控制的价值,后者则衡量了系统控制的代价。因此,本文将把两者有机结合起来,对作动器位置进行优化,体现系统控制评估体系的完整性。
4 算例
在前文的基础之上,本节将针对具体的情况进行数值分析,为此特设主要参数如下:[m=200kg],[l=2.0m],[EI=1.0×104Pa]。对于作动器的优化问题描述如下。
①目标函数:
[minJ1maxJ2] (25)
②設计变量为:
[x=g xcT] (26)
③约束条件:
[g∈-2 000,2 000], [xc∈0,2] (27)
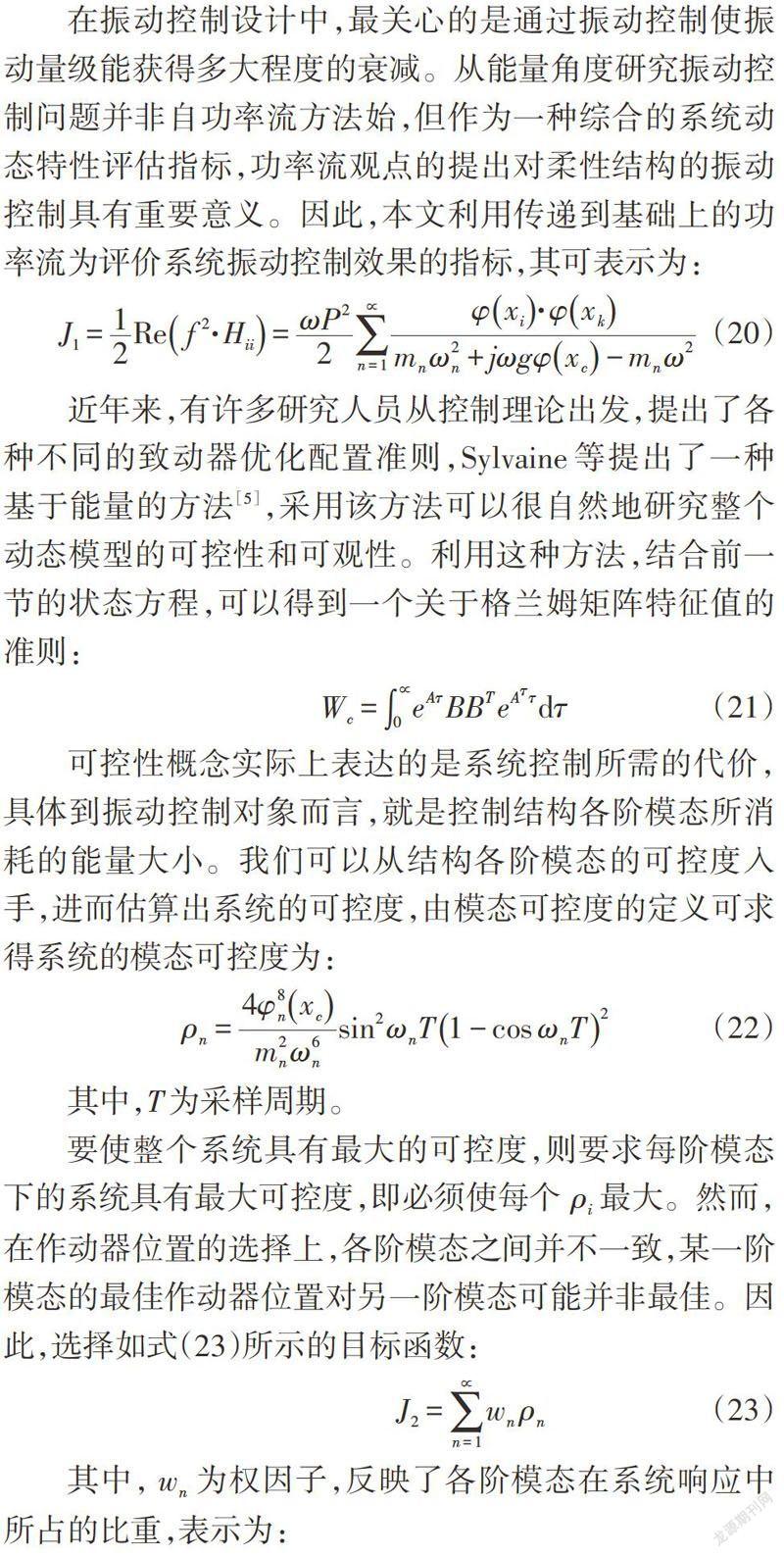
观察目标函数可以发现,在系统其他结构参数一定的情况下,系统可控度J1只与设计变量[xc]有关而与控制反馈系数g无关。因此,整个优化过程可分两个独立步骤,即先求得作动器最佳布置位置,使系统的可控度最大,再求系统的最优控制反馈系数,使传递到系统的功率流最小。
图2和图3分别反映了激励频率为78Hz和269Hz时[xc]与J1的关系。从图中可以看出,作动器的位置对系统的可控度具有很大影响,在[xc=0.5]和[xc=1.0]时分别对应两种激励频率下系统的最大可控度。
图4和图5对比了激励频率为78Hz和269Hz时g与J2的关系。经观察可以得到以下两个结论:一是反馈系数的绝对值越大,输入系统的功率流越小,即振动控制的效果越好;二是在相同的振动控制效果下,系统可控度越大则控制反馈系数越小,即控制所需的能量越小。
5 结论
本文将主动控制理论和振动理论相结合,同时考虑了系统可控性最大化与系统的振动响应最小化这两个目标函数,通过具体算例研究了作动器位置的优化配置问题,得出了以下结论。
①作动器的位置对系统的可控度具有较大影响,其设计的好坏直接影响系统的控制效率和控制所消耗的能量。
②适当增大系统控制反馈系数可以提高系统振动控制的效果,但同时所消耗的能量也会增大。
③本文所采用的方法可以同时兼顾系统的控制代价和控制效果,对振动主动控制系统的工程应用和理论研究都具有重要意义。
参考文献:
[1]魏燕定,李少雄,吕存养.声呐安装平台减隔振主被动控制研究[C]//全国振动理论及应用学术会议暨中国振动工程学会成立20周年庆祝大会.2007.
[2]朱石坚,何琳.舰船水声隐身技术(二)[J].噪声与振动控制,2002(3):17-19.
[3]C.H.汉森,S.D.斯奈德.噪声和振动的主动控制[M].北京:科学出版社,2002.
[4]李俊宝,刘华.自适应桁架结构振动控制中主动构件的最优配置[J].航空学报,1996(6):755-759.
[5]Leleu S, Abou-Kandil H, Bonnassieux Y. Piezoelectric actuators and sensors location for active control of flexible structures[J]. IEEE Transactions on Instrumentation & Measurement,2001(6):1577-1582.
