Improved Algorithms for Removing Isolated Non-Meteorological Echoes and Ground Clutters in CINRAD
2018-09-08HaiboZOUShuwenZHANGXudongLIANGandXuetingYI
Haibo ZOU, Shuwen ZHANG, Xudong LIANG, and Xueting YI
1 College of Atmosphere Sciences, Lanzhou University, Lanzhou 730000
2 State Key Laboratory of Severe Weather, Chinese Academy of Meteorological Sciences, Beijing 100081
3 Meteorological Disaster Emergency Warning Center of Jiangxi Province, Nanchang 330046
ABSTRACT Using China New Generation Weather Radar (CINRAD) level-II data, the original algorithms for removing isolated non-meteorological echoes and ground clutters in radar data, which have been applied to Weather Surveillance Radar-1988 Doppler (WSR-88D) in the USA and Severe Weather Automatic Nowcast (SWAN) system in China, are modified and improved. To remove isolated non-meteorological echoes, the new algorithm introduces a constraint parameter (Po) to distinguish whether a window of 5 × 5 points is isolated as external echoes. A statistical analysis of 150 radar scans (5 cases, with each case comprising 30 scans) under three different echo types (small-scale convection, typhoon, and large-scale synoptic system) shows that the constraint parameter Po ≤ 0.167 is suitable for removing isolated non-meteorological echoes while preserving the edge of meteorological echoes. A new parameter, NDZ,which promotes the ability of the algorithm to identify the ground clutters appearing at two adjacent elevation angles,is constructed based on the vertical continuity of reflectivity. These improved algorithms are tested for four cases(three cases of isolated non-meteorological echoes and one case of ground clutters). Based on the statistics of 232 volume scans of radar data (on a temporal resolution of 1 h) measured at Nanchang station from 0000 UTC 5 to 1600 UTC 14 March 2015, it is found that the improved algorithms not only eliminate most (over 95% under clear-sky conditions) of the isolated non-meteorological echoes and ground clutters (including those appearing at two adjacent elevation angles), but also well preserve the structure of meteorological echoes (storms).
Key words: radar, isolated non-meteorological echoes, ground clutter, quality control
1. Introduction
Doppler weather radar data have high temporal and spatial resolutions and have been widely applied in operational forecasts and research on mesoscale weather phenomena (Anagnostou and Krajewski, 1999; Alfieri et al.,2010; Pan et al., 2010; Qin et al., 2014; Liu et al., 2016),presenting significant advantages compared with other observational data (Serafin and Wilson, 2000; Zheng et al., 2004; Xiao et al., 2008). For instance, radar data can be used to generate high-resolution quantitative precipitation estimations (Fulton et al., 1998; Qi and Zhang,2017) and are often assimilated into numerical weather models for improving the prediction of convective systems (Jones et al., 2015; Ridal and Dahlbom, 2017). In radar data, however, there are not only meteorological echoes, but also non-meteorological echoes, such as ground clutters and isolated echoes that may comprise biological echoes, electronic interference, and so on(Steiner and Smith, 2002; Zhang et al., 2005). The occurrence of isolated non-meteorological echoes and ground clutters can often degrade the performance of applications of radar data in forecasting and research. Therefore,it is important to remove isolated non-meteorological echoes and ground clutters from radar data before they can be used.
Various techniques have been applied to identify and remove isolated non-meteorological echoes and ground clutters from radar data. For identifying isolated nonmeteorological echoes, Fulton et al. (1998) simply defined them as gates with reflectivity exceeding a certain threshold (18 dBZ as default) and having no more than 1 in 8 surrounding neighbors above that threshold.Bergen and Albers (1988) and Krishnapuram and Keller(1993) presented a fuzzy logic based classification scheme to identify isolated points in a picture. Their scheme has been used in meteorological fields to identify isolated non-meteorological echoes, and was incorporated into the Weather Surveillance Radar-1988 Doppler(WSR-88D) system (Zhang et al., 2004) in the USA and the Severe Weather Automatic Nowcast (SWAN) system in China (Wu et al., 2013). Specifically, the method involves computing the percentage of gates with nonmissing values in a box (window) and comparing the results with a given default threshold. If the percentage is less than the threshold, the center point (gate) of the box is regarded as an isolated echo. Although the method performs well in eliminating isolated non-meteorological echoes, it simultaneously removes the edges of meteorological echoes (Wu et al., 2013).
Many studies have also focused on methods to identify ground clutters. For example, using the notion that ground clutters are characterized by near-zero Doppler velocities, Chrisman et al. (1995) developed an automated procedure to reduce or eliminate ground clutters using the radar-observed radial velocity. Unfortunately,however, the procedure also eliminates meteorological echoes with near-zero Doppler velocities, because they exhibit characteristics similar to those of ground clutters.In a later work, Fabry and Gadoury (2009) indicated that although the peak contribution from ground clutters is centered around zero velocity, ground clutters can extend to other velocities and even exceed those of meteorological echoes if they are strong. Meanwhile, Hubbert et al. (2009a) pointed out that the actual measured velocity from ground clutters can vary somewhat from zero and the spectrum width from the clutter can be widened (theoretically, it should be narrow) due to rotational scanning. Hence, such an approach would bias the resulting reflectivity. In radar-based quantitative precipitation estimation, Fulton et al. (1998) simply defined ground clutters as gates whose reflectivity exceed a fixed threshold(65 dBZ in default). Pamment and Conway (1998) devised a scheme to detect ground clutters by combining multiple independent observational data, such as surface observations, satellite images, and so on. However, it is difficult to apply this scheme in practice because of the sparse spatial and temporal resolutions of independent observations. Steiner and Smith (2002) used a decision tree comprised of the vertical extent of echoes, the spatial variability of reflectivity, and the vertical gradient of reflectivity, to identify ground clutters. However, this method also removes boundary layer features (e.g., gust fronts) and cannot handle strong, clear-air echoes, and the ground clutters appearing at two adjacent tilts because of the small vertical gradient of reflectivity. Kessinger et al. (2003) developed a detection algorithm for ground clutters based on fuzzy logic classification (depending on the echo variation on the vertical and azimuth-radial plane), which has since been introduced in the WSR-88D system in the USA. The algorithm has worked well for anomalous propagation and most ground clutters (Liu L. P. et al., 2007; Liu S.-Y. et al., 2008).However, a disadvantage is that it cannot identify the ground clutters presented at two adjacent tilts because they can induce small vertical gradients of reflectivity.Zhang et al. (2004) improved this algorithm by introducing a reference tilt with 3–4.5-km height, instead of an upper tilt, so that it can identify ground clutters appearing at two adjacent tilts. The method has also been introduced into the WSR-88D system in the USA (Zhang et al., 2004) and the SWAN system in China (Wu et al.,2013). Nevertheless, this improved method can only be used for the gates within a certain range from the radar,as the reference tilt is limited by the radar beam height of 4.5 km.
Recently, Hubbert et al. (2009a) constructed a new parameter [called “clutter phase alignment” (CPA)],based on the received base-band complex signal [referred to as the in-phase and quadrature-phase (I and Q)components] at the signal-processing level (i.e., level-I data). It is a good indicator in the identification of ground clutters. For example, the CPA is greater than 0.90 for the vast majority of ground clutters, whereas it is less than 0.5 for most weather echoes. Subsequently, Hubbert et al. (2009b) proposed a clutter mitigation decision(CMD) algorithm (a fuzzy logic recognition algorithm)using a combination of the CPA and other measures(such as the texture of reflectivity, the spatial variability of reflectivity, and so on). The CMD algorithm is designed to run in real time on operational radars and has been implemented in the updated WSR-88D Open Radar Product Generator (Hubbert et al., 2009b). Torres and Warde (2014) introduced a clutter environment analysis using adaptive processing (CLEAN-AP) filter, which is also based on the received base-band complex signals (I and Q) and can adjust its suppression characteristics in real time to match dynamic atmospheric environments.With the operational application of more advanced dualpolarization radars, polarimetric quantities such as the cross-correlation coefficient, the standard deviation of differential propagation phase measurements, differential reflectivity, etc., have been used to classify ground clutters and shown better results (Friedrich et al., 2006;Gourley et al., 2007; Rico-Ramirez and Cluckie, 2008;Lakshmanan et al., 2014).
The China New Generation Weather Radar (CINRAD)network consists of more than 170 radars comprising S-band (SA, SB, and SC types) and C-band (CB, CC, and CD types) instruments manufactured by three companies(Xu et al., 2017). These radars are now single-polarization radars (Su et al., 2018) and their received base-band complex signals (I and Q) at the signal-processing level are not stored in operation. Therefore, although the CMD algorithm (Hubbert et al., 2009b), CLEAN-AP filter(Torres and Warde, 2014), and methods based on polarimetric quantities (Friedrich et al., 2006; Gourley et al.,2007; Rico-Ramirez and Cluckie, 2008; Lakshmanan et al., 2014) have performed well in identifying ground clutters, they cannot be used in CINRAD (i.e., level-II data of single polarization) to eliminate ground clutters.Thus, for CINRAD data, the algorithms of Kessinger et al. (2003) and Zhang et al. (2004) are still a good choice for removing isolated non-meteorological echoes and ground clutters. However, as mentioned above, these methods can also remove the edges of meteorological echoes and cannot identify the ground clutters appearing at two adjacent tilts. Thus, our main goal here is to improve these algorithms such that they can remove isolated non-meteorological echoes whilst preserving the edges of meteorological echoes, as well as identify ground clutters (especially those appearing at two adjacent tilts) on the overall azimuth–range plane.
Following this introduction, the data and processing procedures are described in Section 2. The improved algorithms for identifying isolated echoes and ground clutters are presented in Sections 3 and 4, respectively. A statistical analysis is presented in Section 5, followed by conclusions in Section 6.
2. Data and processing
Three CINRADs located in Jiangxi Province (Fig. 1a)are used to test the methods of removing isolated nonmeteorological echoes and ground clutters from radar base (i.e., level-II) data in this study. The locations of these three radars and altitude of their surroundings are shown in Fig. 1b. The radars located at Nanchang and Shangrao are S-band with type-A CINRADs (i.e., CINRAD/SA), which is a similar instrument to the WSR-88D radar. The one located at Ganzhou is an S-band with type-C CINRAD (i.e., CINRAD/SC), which is produced by 784 Factory in Chengdu, China. Up to 973 automatic rainfall observational stations around Nanchang are used to calculate the rainfall frequency from 0000 UTC 5 to 1600 UTC 14 March 2015. These data are obtained from the Meteorological Information Center of Jiangxi Province, China. The radar data are processed in polar coordinates (radar coordinates), but the corresponding displays are all in Cartesian coordinates. The method of horizontal interpolation with the nearest neighbor on the range–azimuth plane (Xiao et al., 2008) is selected to convert the radar data from polar to Cartesian coordinates with a resolution of 0.01° × 0.01°.
3. Isolated echoes
3.1 Original method

Fig. 1. Maps showing (a) East Asia and (b) the study area with the CINRAD stations in triangles and surrounding topography shaded (in m).
In the raw data observed by Doppler weather radar,there are sometimes many isolated non-meteorological echoes (i.e., noise), derived from sources such as insects,an aircraft, and so on. These isolated non-meteorological echoes obviously affect the application of radar data in estimating rainfall and monitoring weather, as well as data assimilation. Bergen and Albers (1988) and Krishnapuram and Keller (1993) presented a scheme based on fuzzy logic classification to identify isolated points in a picture, and the scheme was then applied in the quality control of radar data to remove isolated non-meteorological echoes (Zhang et al., 2004). The expression of the scheme is

where N is the number of grid points with valid reflectivity in a window (default 5 × 5, i.e., 5 radials and 5 azimuths) whose center is located at point X, andis the total number of points within the window. Whenis less than a threshold (default 0.75), the value at the center point X is regarded as an isolated echo (noise), and then replaced by a missing value. This method has been widely applied in removing reflectivity and radial velocity noises (Wang and Wan, 2006; Liu et al., 2008; Tang,2011; Yang et al., 2011). It has also been introduced into radar operational or nowcasting systems, such as WRS-88D in the USA (Zhang et al., 2004) and SWAN in China (Wu et al., 2013) .
The reflectivity measurements at 0.5° elevation observed by Nanchang CINRAD/SA radar at 2203 UTC 18 June 2016 are selected to test the method (Fig. 2a), and the results show that the method can eliminate the isolated echoes remarkably well (Fig. 2b). However, the method also partially removes the margins of meteorological echoes, such as the encircled area in Fig. 2b. Wu et al. (2013) also pointed out this shortcoming of the method. Intuitively, this deficiency is not particularly problematic in synoptic- and meso-α-scale meteorological echoes, because the area of the removed echoes is relatively small. However, in meso-β- and meso-γ-scale meteorological echoes (i.e., small-scale convective cells), the situation is quite different. Figure 3 depicts the primitive convective echoes observed by the Ganzhou CINRAD/SC radar and the convective echoes filtered by the current method. As shown in Fig. 3, the echo area is significantly reduced after the removal of isolated non-meteorological echoes based on the current method (Fig. 3b).The areas of all the convective cells (clouds A–F) are reduced by more than 30% (Table 1). Particularly, the area of cloud C decreases from 32 to 9 km2(a reduction of 72%), such that it is difficult to find in Fig. 3b.Moreover, the method can also remarkably decrease the coverage of radar echoes in nascent squall lines. This is because their shape is often long and narrow, meaning that the edge of echoes can be removed more effectively.For example, the area of the nascent squall line that occurred in northeastern Nanchang at 1003 UTC 10 June 2017 (Fig. 4a) decreases by about 30%, from 2189 to 1543 km2. In particular, west of the squall line, the echo area decreases by about 50% (Fig. 4b). It is clear that the method has a shortcoming in that, when it eliminates isolated echoes, it partially removes the margins of meteorological echoes too. This situation is quite obvious in small-scale convective cells and squall lines with a long and narrow shape, because the edges of meteorological echoes account for a large proportion of the total echo area.

Fig. 2. The 0.5°-elevation reflectivity (dBZ) field (a) before and (b) after removal of isolated echoes with the original method at 2203 UTC 18 June 2016. The black circle denotes an area for comparison.

Fig. 3. As in Fig. 2, but for Ganzhou radar at 0400 UTC 12 June 2017.

Fig. 4. As in Fig. 2, but at 1003 UTC 10 June 2017.

Table 1. The area (km2) of each convective cloud in Fig. 3
3.2 Improvements on the original method
What has caused the problem in the original method?In fact, when a window comprising 5 × 5 grid points is located at the edge of a storm, only half of all 25 grid points have valid radar reflectivity (Fig. 5a). The variable PXis about 0.5, less than the threshold (0.75).Therefore, the echo at the window’s center point is regarded as an isolated echo and will be replaced by a missing value, destroying the edge of meteorological echoes. Although decreasing the threshold to below 0.5 could probably conserve the edge, it evidently decreases the ability to remove isolated non-meteorological echoes.Thus, in the new algorithm, a constraint parameterPothat emphasizes whether an echo is isolated, is added to jointly determine (with PX) whether or not the echoes in the window are isolated. The variable Pois expressed as


Fig. 5. Schematic illustration of the method for removing isolated radar reflectivity: (a) original scheme and (b) improved scheme.
where Npt= 24 is the total number of connected peripheral grid points (i.e., the points along the dotted outmost square) around the window (Fig. 5b), andis the number of these connected peripheral grid points with valid reflectivity (i.e., those denoted by hollow circles in the storm area in Fig. 5b; Npv= 11 in this case). Based on Eq.(2), a medium or largeindicates that the echoes in the window are connected with outside echoes, while a small Po(approaching 0) reflects that the echoes in the window are disconnected with external ones. Therefore, a small Potogether with a smallindicates that all points, not only the center point, in the window should be marked as isolated echoes. Meanwhile, a smallaccompanied with a large(often occurring at the edge of echoes) or just a large (often occurring at convective cells) corresponds to real meteorological echoes.
Theoretically, when echoes in the window are disconnected with external echoes (i.e., isolated echoes),should equal to 0. In fact, however, in the area of dense isolated non-meteorological echoes (near the radar station), a few of the adjacent peripheral grid points around the window (the one in the dotted square in Fig. 5b) may have valid reflectivity, leading to> 0. But what threshold of) is effective in identifying isolated non-meteorological echoes whilst preserving the edges of meteorological echoes? A large threshold can remove the edges of meteorological echoes, whereas a small threshold cannot eliminate isolated echoes effectively. It is worth noting that the improved algorithm can be used repeatedly to eliminate isolated echoes without removing the margins of meteorological echoes, because the constraint connected with external echoes limits the removal of meteorological echo margins. Therefore, a proper threshold could possibly be found by applying the improved algorithm several times to the raw data and observing the consequences. Figure 6 shows the echoes as a result of repeatedly applying (specifically, 5 times) the improved algorithm with Po≤ 0.125 (i.e., Npv≤ 3),Po≤ 0.167 (i.e., Npv≤ 4), Po≤ 0.208 (i.e., Npv≤ 5), and≤ 0.25 (i.e., Npv≤ 6), respectively. As shown in Fig.6, some isolated echoes remain near the radar at Po≤0.125 (Fig. 6a), and some edges of meteorological echoes in cloud C have been removed at≤ 0.208 (Fig. 6c).More dramatically, when≤ 0. 25 (Fig. 6d), cloud C completely disappears, and some edges of clouds A and F have also been removed. This indicates that≤0.167 (i.e.,≤ 4) is a reasonable choice for removing isolated non-meteorological echoes as much as possible whilst preserving the edges of meteorological echoes.
Figures 2a, 3a, 4a, and 6a show that the intensity of most isolated non-meteorological echoes is less than 20 dBZ, and the echoes with reflectivity larger than 20 dBZ are considered as meteorological echoes. Therefore, the areas of echoes over 20 dBZ can imply the range of meteorological echoes. The rate of reduction of echoes over 20 dBZ is defined as
“Good evening.” The waiter said. “ Table for four?”“Yes, thank you.”“Smoking or non?”“Nonsmoking.”“Would you prefer to dine indoors or outdoors this evening?”“I guess indoors would be good.”

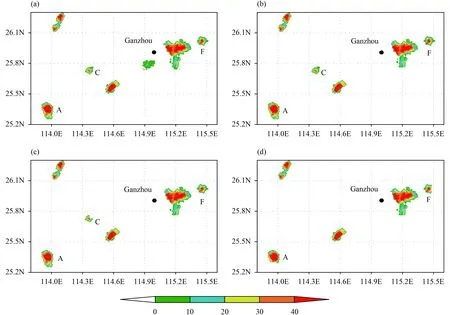
Fig. 6. The 0.5°-elevation reflectivity (dBZ) filtered 5 times by the improved method with (a) ≤ 0.125, (b) ≤ 0.167, (c) ≤ 0.208, and(d) P o ≤ 0.25 for Ganzhou CINRAD/SC radar at 0400 UTC 12 June 2017.
where Aa(Ab) is the area of echoes over 20 dBZ after(before) the radar data are processed with the improved algorithm. The rate of reduction is used to further verify the threshold of Poin the improved algorithm. Five cases are processed by using the improved algorithm with different thresholds of Po(each case has 30 radar scans) as follows: three convective storms that occurred respectively during 0300–0600 UTC 25 August 2017 (Case 1),0200–0500 UTC 15 May 2017 (Case 2), and 0400–0700 UTC 8 September 2017 (Case 3); a typhoon (Nesat)storm that occurred during 1100–1300 UTC 30 July 2017(Case 4); and a synoptic-scale storm that occurred during 0200–0500 UTC 15 May 2017 (Case 5). The corresponding statistical analysis of Pris shown in Table 2. The rate of reductionincreases with Poand is lowest in the synoptic-scale storm (Case 5) due to the large horizontal continuity of reflectivity. When Poincreases to 0.208(i.e.,= 5), Prin Cases 1–4 begins to rapidly increase,indicating that the edges of meteorological echoes have been noticeably removed. Interestingly, although Prof echoes more than 20 dBZ is small in the synoptic-scale storm (Case 5) compared to the other 4 cases, it also increases to 0.1% at≤ 0.208 from approximately 0.0%at Po< 0.208. These results indicate that the threshold of Poshould be less than 0.208 (i.e., Npv< 5). On the other hand, the larger the threshold of Po, the greater the removal of isolated non-meteorological echoes. Therefore,selecting 0.167 as the threshold of Po(i.e.,= 4) is most suitable for removing isolated non-meteorological echoes as much as possible whilst simultaneously preserving the meteorological echoes. The statistical results further suggest that≤ 0.167 is the best choice. The performance of the improved algorithm with≤ 0.167 in the reflectivity fields at 0.5° elevation for Nanchang radar at 2203 UTC 18 June 2016 (Fig. 7a) and 1003 UTC 10 June 2017 (Fig. 7b) shows that the results are largely free of isolated non-meteorological echoes whilst the edges of the meteorological echoes are almost entirely preserved (the original reflectivity fields are shown in Figs. 2a and 4a, respectively).
4. Ground clutters
Although the above improved algorithm is very useful for removing small, isolated non-meteorological echoes,it is impossible for it to eliminate ground clutters because ground clutters often occupy a relatively large area.However, ground clutters usually show worse spatialcontinuity than meteorological echoes, in both horizontal and vertical directions (especially the latter). Therefore, the difference in the spatial discontinuity between ground clutters and meteorological echoes can be used to identify and remove the ground clutters.

Table 2. Rate of reduction (P r ; %) of echoes larger than 20 dBZ in different cases with different values ofPo
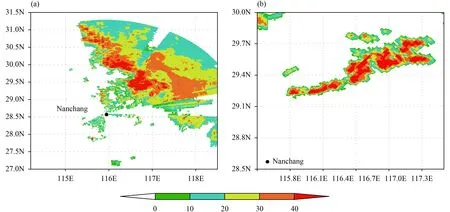
Fig. 7. The 0.5°-elevation reflectivity (dBZ) fields at Nanchang radar, processed with ≤ 0.167, at (a) 2203 UTC 18 June 2016 and (b) 1003 UTC 10 June 2017.
4.1 Original method
Meteorological echoes usually extend from the lower troposphere to the middle or upper troposphere, having a relatively deep vertical extent. Thus, the variation in reflectivity in the vertical direction is relative small (i.e.,the vertical gradient of echoes is relatively small). In contrast, ground clutters often appear at only one or two elevation angles, with an abrupt change in intensity in the vertical direction. Based on this, the vertical discontinuity of reflectivity is widely used to filter out ground clutters (Steiner and Smith, 2002; Kessinger et al., 2003;Zhang et al., 2004; Wu et al., 2013). In the WSR-88D system in the USA (Kessinger et al., 2003), the vertical gradient of reflectivity with range weighting (RGDZ) is selected as the main variable for the identification and removal of ground clutters from its single-polarization,level-II radar data. The expression of RGDZ is

where Z is the reflectivity value at the selected elevation angle, Zupis the reflectivity at the upper elevation angle,and W is a weighting function with respect to the range.When the range is less than 40 km, W = 1; W decreases linearly from 1 to 0.5 with an increase in the range from 40 to 200 km. Then, W continues to decreases linearly from 0.5 at 200 km to 0 at 300 km (Kessinger et al.,2003). A large RGDZ implies existence of ground clutters, while a small RGDZ corresponds to meteorological echoes. The inclusion of W in the RGDZ expression is to allow for the presence of a stratiform precipitation system, which at long ranges from the radar will show a large vertical gradient of reflectivity owing to the shallow extension of this type of echo. The method works well for the ordinary ground clutter, because it often only appears at one elevation angle. However, sometimes a ground clutter will appear at two adjacent elevations,e.g., in a mountainous region close to the radar site. For instance, in this study, in the mountain region with peak altitude exceeding 1100 m, oriented from northeast to southwest and located about 30 km northwest from the Shangrao radar site, ground clutters appear at two adjacent elevations (2.4° and 3.4°) (Fig. 8). The distribution of the ground clutter at the 2.4° (3.4°) elevation angle is analogous to the shape of the terrain over 700 m (1100 m). Therefore, the value of RGDZ at the elevation of 2.4°is relatively small in the area with intense echoes at the elevation of 3.4°. In such a situation, the RGDZ value cannot be utilized to properly identify and remove the ground clutter.
To address this problem, Zhang et al. (2004) designed a new parameter, VDZ, which can be expressed as


Fig. 8. The reflectivity fields at elevation angles of (a) 2.4° and (b) 3.4° at 2332 UTC 9 May 2014. Solid lines indicate the terrain contours of 700 and 1100 m.
where H is the height of the radar beam at the selected elevation angle; Zrefand Hrefare the reflectivity and height at the upper reference elevation angle, respectively. The first upper elevation with radar beam height between 3 and 4.5 km will be treated as the reference elevation (i.e.,3 km ≤ Href≤ 4.5 km). Thus, VDZ can remove ground clutters better than RGDZ under the condition of ground clutters appearing at two adjacent elevation angles. This promising performance of VDZ is the result of Zrefnot being a ground clutter (because Hrefis more than 3 km and ground clutters are often below 3 km). Similar to the situation with RGDZ, a large VDZ indicates existence of ground clutters, while a small VDZ corresponds to meteorological echoes. The VDZ parameter is applied in the WSR-88D radar operational system in the USA (Zhang et al., 2004) and the SWAN system in China (Wu et al.,2013).
Although VDZ has the advantage over RGDZ in terms of removing ground clutters, it is confined by the Hrefbeing less than 4.5 km. There are 9 elevation angles for the VCP21 mode (common mode) in the CINRAD SA/SC radar, and these elevation are 0.5°, 1.5°, 2.4°, 3.4°, 4.3°,6.0°, 9.9°, 14.6°, and 19.5°. The corresponding range ()of different elevations at the height of 4.5 km can be calculated (Zhang et al., 2005) by

where RW= 8500 km (i.e., 4/3 earth’s radius) represents the effective earth radius, and θ is the elevation angle of the radar beam. In terms of Eq. (6), R at 1.5° and 2.4° elevation is about 130 and 95 km, respectively. This means that the VDZ can only be used at ranges less than 130 km(95 km) at 0.5° (1.5°) elevation. The maximum range for a valid VDZ is even shorter at higher elevations. This constraint severely limits the applicability of the VDZ.Besides, the presence of the denominatormay also cause a smaller VDZ value in the region of ground clutter, leading to error in the removal of ground clutter.For example, supposing an instance of ground clutter with an intensity of 50 dBZ appears at about 45 km from the radar at 0.5° elevation (height of radar beam is approximately 0.5 km) and there is no effective reflectivity at its upper elevation angles. Therefore, its reference elevation and height are 4.3° and about 3.5 km, calculated by using Eq. (6), respectively. Then, the denominatoris approximately 3 km and the VDZ is approximately 16.7 (50/3) dBZ, which is less than the threshold(20 dBZ) defined in Zhang et al. (2004), ultimately resulting in a failure to identify and remove the ground clutter. A few scattered instances of high-reflectivity clutter near the radar are left in the filtered reflectivity field (Fig.8 in Zhang et al., 2004), which may also be a result of the presence of the denominator.
4.2 Improvements on the original method
The parameters RGDZ and VDZ have their own respective advantages and disadvantages. Based on their advantages, a new parameter, NDZ, can be constructed as follows:

Here, W is the same as the weighting function in Eq.(4), andis the maximum range with a valid VDZ value (130 km at 0.5° elevation). The NDZ not only preserves the advantage of VDZ, but also makes up for its shortcomings by extending the useful ranges and removing the denominator. The distribution of NDZ at 2.4° elevation is shown in Fig. 9a. We find that the area (ground clutter) with large values (> 20 dBZ) of NDZ just overlaps the terrain with height exceeding 700 m and the area with reflectivity exceeding 40 dBZ in Fig. 8a. The ground clutter in Fig. 8a is successfully identified and removed based on the NDZ parameter (Fig. 9b).
5. Statistical analysis
The removal of isolated echoes and ground clutters is performed by following two steps. First, under the condition of NDZ ≥ 20 dBZ, the ground clutter is removed from the radar base (level-II) data. Second, combining the two conditions≤ 0.75 [Eq. (1)] and≤ 0.167[Eq. (2)], the isolated non-meteorological echoes are eliminated from the radar data. The reason to place the removal of ground clutters in the first step is that this process may generate new isolated echoes.
To further evaluate the performance of the improved algorithms in removing ground clutters and isolated nonmeteorological echoes, the frequency images of original reflectivity over 20 dBZ at 0.5° evaluation, echo top (ET)height more than 3 km, precipitation more than 0.1 mm h–1, and processed (using the improved algorithm) reflectivity over 20 dBZ at 0.5° elevation, are all generated from 0000 UTC 5 to 1600 UTC 14 March 2015 (232 scans with a 1-h temporal resolution; Fig. 10). This period encompasses a series of precipitation and clear-sky echoes. The frequency image has been used previously by Steenburgh et al. (2000) to describe the echoes induced or enhanced by the Great Salt Lake in the USA. In the frequency image of the raw reflectivity over 20 dBZ(Fig. 10a), most regions are filled by points with low frequency (less than 0.15). However, several scattered points with high frequencies (larger than 0.2, and even reaching 0.5) are apparent in the surroundings of Nanchang, as well as some flaky areas with high frequencies(larger than 0.2, and even reaching 0.8) near the mountains located to the west, north, and south of Nanchang.These regions with high frequency are evidently caused by isolated echoes (possibly from the tall buildings of Nanchang city) and ground clutters, because they are more stationary compared with meteorological echoes.The ET height can reflect the development of a storm and the intensity of the associated precipitation system(Bedka et al., 2015). Normally, the ET height of meteorological echoes is more than 3 km. Therefore, the frequency image of ET height more than 3 km (Fig. 10b)can to a large extent depict the distribution of meteorological echoes. As shown in Fig. 10b, the frequencies in the whole region are less than 0.2. Particularly, in the regions where the frequencies in Fig. 10a are more than 0.2, the frequencies of ET height are less than 0.15, or even 0.1. This further verifies that the regions with high frequency in Fig. 10a are created by non-meteorological echoes. The frequency distribution of precipitation with a 1-h temporal resolution (Fig. 10c) also illustrates this viewpoint, because there are no high frequencies in the regions shown in Fig. 10a. After removing the ground clutters and isolated non-meteorological echoes using the improved algorithms, in the frequency image of reflectivity over 20 dBZ at 0.5° elevation, there is no point with a frequency more than 0.2 (Fig. 10b) and the distribution of frequencies less than 0.15 coincides with that of unprocessed frequencies (Fig. 10a). It is clear that the improved algorithms perform well in removing the isolated non-meteorological echoes and ground clutters, whilst preserving the structure of storms at the same time. The areas with the highest frequency (> 0.15) are located over the mountain region in southern Nanchang in Fig. 10d,but the areas with the highest frequency in Figs. 10b, c are not. This indicates that, although the improved algorithm for identifying ground clutters has performed well, it cannot completely remove all ground clutters.Note that in Figs. 10a, b, d, the areas with low frequency(< 0.05, and even 0.1) are mainly induced by the blocking of the radar beam at 0.5° elevation in the southeast of Nanchang.

Fig. 9. The (a) NDZ (dBZ) and (b) reflectivity (dBZ) filtered by the improved method at 2.4° elevation at 2332 UTC 9 May 2014. Solid lines indicate the terrain contours of 700 and 1100 m.

Fig. 10. The frequencies of (a) original reflectivity over 20 dBZ at 0.5° elevation of Nanchang radar, (b) ET height more than 3 km, (c) precipitation more than 0.1 mm h–1, and (d) processed (using the improved method) reflectivity over 20 dBZ at 0.5° elevation of Nanchang radar from 0000 UTC 5 to 1600 UTC 14 March 2015 (232 samples). Solid lines indicate the altitudes of 200 and 500 m. The open circles in (c) indicate the rain gauges.
The above analyses show that the high frequencies (>0.2) in Fig. 10a are mainly induced by isolated non-meteorological echoes and ground clutters (near mountain regions). Clearly, the ground clutters in the mountain regions characterized by high frequency are the important part of the observed echoes. Meanwhile, the isolated non-meteorological echoes in other regions with high frequency are also important. In order to quantitatively evaluate the performance of the improved algorithms, the ratio of removal of isolated non-meteorological echoes and ground clutters is defined as

6. Conclusions
The present study proposes improvements to two algorithms commonly used for removing isolated non-meteorological echoes and ground clutters from single-polarization, level-II radar data. In view of the shortcomings of the original methods, which can remove the edges of meteorological echoes but cannot identify ground clutters appearing at two adjacent elevation angles, the current algorithms offer improvements in these respects. To remove isolated non-meteorological echoes as much as possible whilst preserving the edges of meteorological echoes, the improved algorithm introduces a constraint parameter, Po, to determine whether a window of 5 × 5 grid points is in isolation. To identify the ground clutters appearing at two adjacent elevation angles without range limitation, the improved algorithm establishes a new vertical difference of reflectivity (NDZ) based on the parameters RGDZ and VDZ in the WSR-88D system. Correspondingly, a set of criteria are proposed for the improved algorithms to remove isolated non-meteorological echoes and ground clutters.
A statistical analysis of 5 cases (each with 30 scans,making a total of 150 scans) with different echo types (3 small-scale convection cases, 1 typhoon case, and 1 large-scale synoptic system case) demonstrates that a constraint parameter of Po≤ 0.167 is suitable for the improved algorithm to remove isolated non-meteorological echoes as much as possible whilst at the same time preserving the edges of meteorological echoes. The improved algorithms with Po≤ 0.167 and NDZ ≥ 20 dBZ are tested in 4 cases (3 for isolated non-meteorological echoes and 1 for ground clutter) and the statistics of 232 scans of radar data (temporal resolution of 1 h) measured at Nanchang from 0000 UTC 5 to 1600 UTC 14 March 2015. The results show that the improved algorithms not only remove most (> 95% under clear-sky conditions) of the isolated non-meteorological echoes and ground clutters (including that occurring at two adjacent elevation angles), but also preserve the structure of storms well.

Fig. 11. Evolution of the ratios of removed ground clutters and isolated non-meteorological echoes, along with rainfall (mm) and ET height(km), averaged in the domain (27°–30°N, 114.5°–117°E) from 0000 UTC 5 to 1600 UTC 14 March 2015.

Fig. 12. The (a) original reflectivity field and (b) processed (using the improved methods) reflectivity field at 0.5° elevation observed by Nanchang radar at 2300 UTC 10 March 2015.
Although the improved algorithms have shown promise in removing isolated non-meteorological echoes and ground clutters, certain residual non-meteorological echoes (especially for ground clutter) still exist, such as those in Figs. 10d, 11 (under clear-sky conditions, the ratios of removal of ground clutters are sometimes less than 100%). This indicates that there is still some room for the algorithms to be further improved. Particularly,other independent data, such as radar radial velocity,radar spectrum width, etc., should be introduced to jointly improve the algorithms even further.
Acknowledgments.We thank the two anonymous reviewers and the editor for their constructive comments,which have certainly helped improve the manuscript from its original version. Dr. Zhiqun Hu provided useful comments and suggestions regarding the received baseband complex signal at the signal-processing level.
杂志排行

Journal of Meteorological Research的其它文章
- Long-Term Integration of a Global Non-Hydrostatic Atmospheric Model on an Aqua Planet
- Influence of the Boreal Summer Intraseasonal Oscillation on Extreme Temperature Events in the Northern Hemisphere
- Joint Impacts of SSTA in Tropical Pacific and Indian Oceans on Variations of the WPSH
- Sensitivity Experiments on the Poleward Shift of Tropical Cyclones over the Western North Pacific under Warming Ocean Conditions
- Raindrop Size Distribution Parameters Retrieved from Guangzhou S-band Polarimetric Radar Observations
- Statistics of the Z–R Relationship for Strong Convective Weather over the Yangtze–Huaihe River Basin and Its Application to Radar Reflectivity Data Assimilation for a Heavy Rain Event