捷联惯导外场条件下系统级标定技术仿真方法
2018-09-03冯连鸣国琳娜王立文张秦南洪建英
阮 卫, 冯连鸣, 国琳娜, 王立文, 张秦南, 洪建英
捷联惯导外场条件下系统级标定技术仿真方法
阮 卫1,2, 冯连鸣1, 国琳娜1, 王立文1, 张秦南1, 洪建英1
(1. 中国船舶重工集团公司 第705研究所, 陕西 西安, 710077; 2. 水下信息与控制国防重点实验室, 陕西 西安, 710077)
为解决实验室标定存在成本高, 工作量大的问题, 文中提出了一种外场条件下、免拆卸的系统级标定技术数值仿真方法, 通过Matlab构建轨迹发生器、惯性测量组合(IMU)模块、惯导解算模块以及滤波器模块, 编排多位置实验对IMU误差进行标定。仿真结果表明, 通过合理的位置设计, 能有效激励IMU误差, 从而对IMU误差进行标定。文中工作可为水下航行器导航定位研究提供参考。
水下航行器; 捷联惯导; 轨迹发生器; 系统级标定
0 引言
捷联惯性导航系统中, 惯性测量组合(inert- ial measurement unit, IMU)误差是影响导航精度的重要因素之一, 在IMU出厂前, 必须对惯性器件进行标定以满足精度要求[1]。然而, 由于种种原因, 随着时间的推移, 惯性测量组合中电子元器件的老化、所处各种环境的变化[2], 必然会引起惯性器件误差参数发生变化, 从而导致IMU指标超差(性能指标低于出厂指标), 无法满足对准和导航的精度要求。因此必须定期对IMU的误差进行标定。
传统实验室标定方法严重依赖高精度转台, 工作量大、成本高, 而且使用和维护不便。因此, 有必要研究IMU外场标定技术。近年来,国内外学者对此进行了相关研究, 高伟等[3]提出载体“S”型机动以及增加姿态信息为外部观测量等外场标定方案; Li等[4]以速度误差和角速率误差作为外部观测量, 通过估计出每个位置等效天向和北向的陀螺漂移以及天向加计零偏, 用最小二乘法实现误差估计; 赵晓伟等[5]提出了一种基于载车四位置转位的免拆卸标定方法; 杨晓霞等[6]根据线性时变系统的可观性判别理论, 设计组合运动, 完成动态标定。但外场实际情况下, 可用基准信息较少且机动方式有限。
文中在上述文献的基础上, 通过设计完整的系统级标定技术仿真系统, 仅以水平速度误差作为系统观测量, 对载体进行简单多位置实验编排以激励IMU误差, 同时结合分段定常系统(piece- wise constant system, PWCS)可观测分析理论对系统进行可观性分析。
1 惯性测量组合模块仿真
文中导航坐标系(系)采用东北天()坐标系, 机体系(系)选右前上。轨迹发生器可以设置载体的不同机动形式, 再通过惯导基本方程进行解算, 得到陀螺和加速度的比力及其相应的增量, 以模拟惯性测量组合的输出。
1.1 轨迹发生器

1) 加速
欧拉角不变, 仅存在纵轴向速度变化, 描述为

2) 滚转
纵轴方向速度不变, 俯仰角和方位角不变, 仅存在横滚角变化, 描述为

3) 俯仰(抬头或低头)
纵轴方向速度不变, 横滚角和方位角不变, 仅存在俯仰角变化, 描述为

4) 方位转弯
纵轴方向速度保持不变, 俯仰角和横滚角不变, 仅方位角变化, 描述为

1.2 IMU模块
通过设置载体的机动形式, 可以进一步通过式(5)~式(13)的计算得到每一时刻的陀螺仪和加速度计的值, 从而模拟IMU数据。
1.2.1 陀螺仪数据仿真
地球坐标系相对惯性坐标系的旋转角速率[8]

导航坐标系相对地球坐标系的旋转角速率

机体坐标系相对导航坐标系的旋转角速率

根据式(5)~式(7)可计算陀螺仪理想数据输出

在式(8)的基础上加入陀螺仪常值漂移和随机噪声, 可模拟实际带有误差的陀螺仪输出

1.2.2 加速度计数据仿真
已知捷联惯性导航系统速度更新方式为

由式(10)可以反推计算得


多位置实验仿真中只考虑陀螺仪常值漂移和加速度计常值零偏的影响, 只对陀螺仪常值漂移和加速度计常值零偏进行标定。
1.2.3 IMU模块Simulink仿真
图1中, 轨迹发生器[9]的输出是载体的欧拉角变化率和机体系的加速度, 表征了载体的机动动作。在Simulink设计中, 以clock模块为系统的时钟, 根据时钟变化在运动轨迹模块内设置欧拉角变化率和机体系的加速度, 以实现载体的机动, 再通过惯性器件仿真器进行解算, 模拟IMU仿真数据。
2 捷联惯导解算模块与卡尔曼滤波器
2.1 捷联惯导更新算法
1) 姿态更新算法(四元素法)
2) 速度更新算法(见式(10))
3) 位置更新算法

图1 IMU模块

2.2 卡尔曼滤波器
2.2.1 系统状态方程

捷联惯导系统相关误差为





2.2.2 系统量测方程
外场条件下仅选取速度误差作为观测量, 系统量测方程

2.3 PWCS可观测性分析
系统状态的可观测性反映了系统状态变量的可估计性。在连续多位置条件下, 捷联惯导是一个时变的系统, 可采用PWCS对时变系统进行可观性分析。设离散的线性时变系统



对系统齐次方程式, 由初值表示的系统输出


3 仿真结果与分析


图2 三位置实验方案示意图
此次仿真总的时间为720 s, 其中20 s是转动时间。图3与图4 为带有实际误差的IMU数据仿真, 图5与图6为捷联惯导解算模块解算的实际速度与姿态角, 图7的(a)和(b)为陀螺仪常值漂移与加速度计常值零偏估计值与真实值, 图7(c)为失准角真实值与估计值。

图3 陀螺仪仿真数据输出曲线

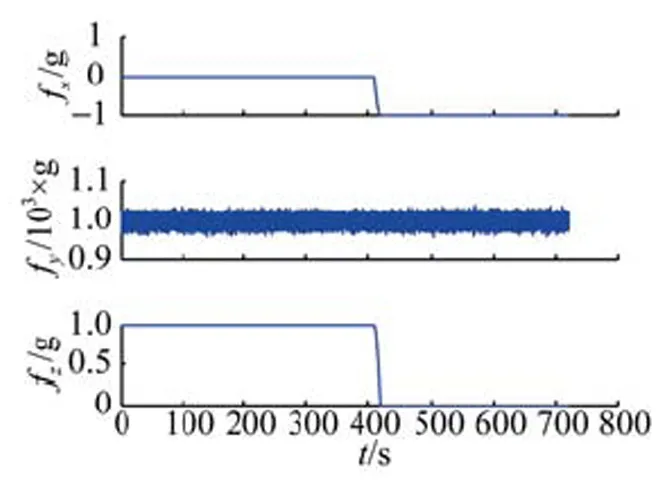
图4 加速度计仿真数据输出曲线
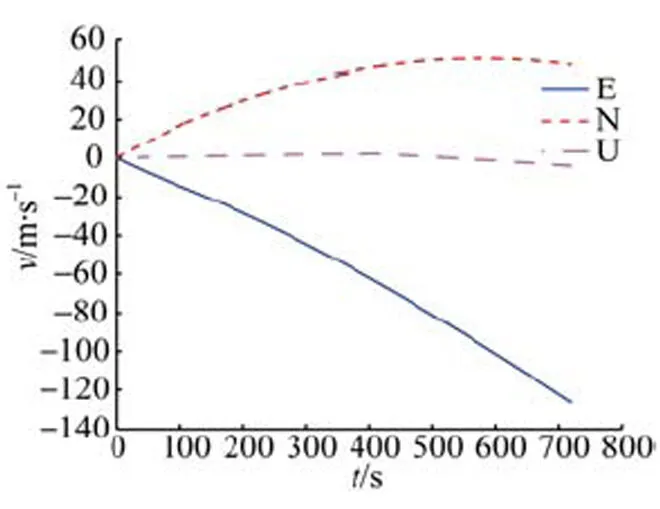
图5 导航速度解算值曲线

图6 姿态角解算值曲线

图7 陀螺仪常值漂移、加速度计常值零偏及失准角的估计值曲线

表1 陀螺仪常值漂移估计值与真实值对比
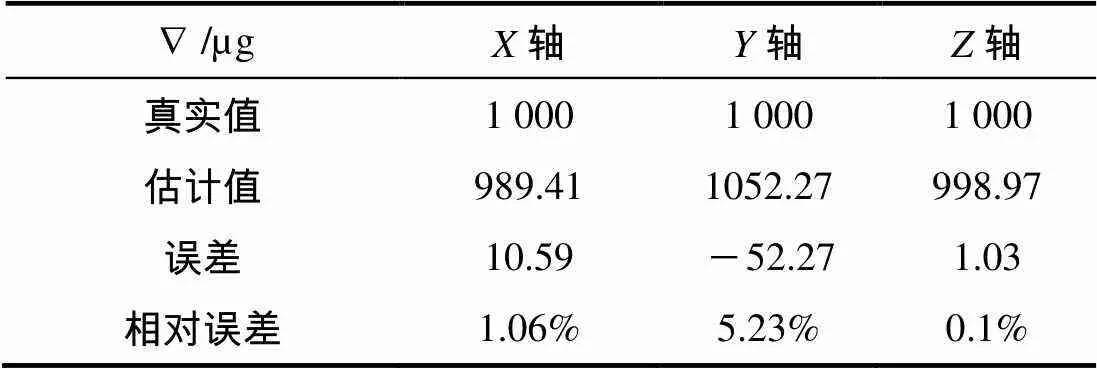
表2 加速度计常值零偏估计值与真实值对比
4 结束语
针对外场标定机动方式有限, 可用基准信息较少, 文中设计了一种系统级标定仿真系统, 可对外场条件下载体的机动形式进行仿真分析, 以研究有效激励IMU误差的方式。在实际工程中可根据不同的实际情况, 进行方案设计, 该方法可为水下航行器外场标定提供参考。下一步工作将结合实验进行验证。
[1] 党雅娟, 鲁浩, 庞秀枝. 空空导弹捷联惯导系统空中标定技术研究[J]. 计测技术, 2010, 30(4): 23-26.Dang Ya-juan, Lu Hao, Pang Xiu-zhi. Research on Infli- ght Calibration Method of SINS on Air-to-air Missile[J]. Metrology & Measurement Technology, 2010, 30(4): 23-26.
[2] 吴平, 雷虎民, 邵磊, 等. 一种车载筒弹惯导装置不开箱标定方法[J]. 导航与控制, 2010, 15(1): 17-22. Wu Ping, Lei Hu-min, Shao Lei, et al. Calibration without Opening Box for Vechicle Silo Missile’s Inertia Instrument[J]. Journal of Chinese Inertial Technology, 2010, 15 (1): 17-22.
[3] 高伟, 叶攀, 许伟通. 捷联惯导系统现场标定方法[J]. 计算机测量与控制, 2016, 24(7): 17-22.Gao Wei, Ye Pan, Xu Wei-tong. Field Calibration Meth- od for Strapdown Inertial Navigation System[J]. Compu- ter Measurement & Control, 2016, 24(7): 17-22.
[4] Li Z, Yang Z W, Zhang W. A Method of Field Calibration For Vehicle-based SINS[C]//2016 13th International Con- ference on Ubiquitous Robots and Ambient Intelligence (URAI). Xi’an: IEEE, 2016.
[5] 赵晓伟, 孙谦, 李宏, 等. 一种车载激光捷联惯组免拆卸标定方法[J]. 导航与控制, 2016, 15(1): 301-303. Zhao Xiao-wei, Sun Qian, Li Hong, et al. A Free Disa- ssembly Calibration Method for Strapdown Inertial Nav- igation System Based on the Vehicle[J]. Navigation and Control, 2016, 15(1): 301-303.
[6] 杨晓霞, 孟浩然, 王帅. 激光陀螺捷联惯导系统的外场动态标定方法[J]. 中国惯性技术学报, 2011, 19(4): 393- 398.Yang Xiao-xia, Meng Hao-ran, Wang Shuai. Calibration Method for Laser Gyro SINS Under Outer Field Dynamic Conditions[J]. Journal of Chinese Inertial Technology, 2011, 19(4): 393-398.
[7] 严恭敏. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2017.
[8] Guo Y J, Zhang Y S, Li C Y. Design of Trajectory Gener- ator of Triaxial Swing Based on Inertial Sensors[C]// 2015 12th IEEE International Conference on Electronic Measurement & Instruments(ICEMI). Qingdao: IEEE, 2015.
[9] 石小稳, 秦永元. 基于Matlab/Simulink捷联惯导系统快速设计[J]. 系统仿真学报, 2009, 21(12): 3484-3488. Shi Xiao-wen, Qin Yong-yuan. Rapid Design of Strap- down Inertial Navigation System Based on Matlab/Sim- ulink[J]. Journal of System Simulation, 2009, 21(12): 3484-3488.
[10] 王新龙. 捷联式惯导系统动、静基座初始对准[M]. 西安: 西北工业大学出版社, 2013.
(责任编辑: 杨力军)
Simulation Method of Systematic Calibration Technology for Strap-Down Inertial Navigation under Outer Field Condition
RUAN Wei1,2, FENG Lian-ming1, GUO Lin-na1, WANG Li-wen1, ZHANG Qin-nan1, HONG Jian-ying1
(1. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi’an 710077, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi’an 710077, China)
To solve the problem of high cost and heavy workload for calibration in laboratory, a numerical simulation method of disassembly-free and systematic calibration technology under outer field condition is proposed. The trajectory generator, the module of inertial measurement unit(IMU), the inertial navigation solution module and the filter module are built by using Matlab, and the IMU errors are calibrated by arranging multi-position test. Simulation results show that the IMU errors can be effectively excited by reasonable position design, then the IMU errors can be calibrated. This study may provide a reference for undersea vehicle navigation and positioning research.
undersea vehicle; strap-down inertial navigation; trajectory generator; systematic calibration
TJ630; U666.1; V249.3
A
2096-3920(2018)04-0330-05
10.11993/j.issn.2096-3920.2018.04.009
阮卫, 冯连鸣, 国琳娜, 等. 捷联惯导外场条件下系统级标定技术仿真方法[J]. 水下无人系统学报, 2018, 26(4): 330-334.
2018-04-03;
2018-04-19.
阮 卫(1993-), 男, 在读硕士, 研究方向为水中兵器惯性导航技术.