基于动磁测量与磁偶极子模型的鱼雷近场定位技术
2018-09-03许政,李伟,秦楠,马琪
许 政, 李 伟, 秦 楠, 马 琪
基于动磁测量与磁偶极子模型的鱼雷近场定位技术
许 政, 李 伟, 秦 楠, 马 琪
(海军潜艇学院, 山东 青岛, 266100)
为了丰富鱼雷近场定位方法, 文中基于动磁测量技术(DMMT)与磁偶极子反演定位模型, 提出了一种新的鱼雷近场定位技术, 并构建了相应测量系统。通过陆上试验, 验证了该技术可实现动磁源的近场准确定位, 且测量系统具有较高的精度和稳定性。该技术可为鱼雷靶场建设中的末弹道与脱靶量测量、过靶相对态势判断等研究提供参考。
鱼雷; 磁偶极子; 动磁测量; 近场定位
0 引言
近年来各国海军在水中兵器领域有了新的发展, 高命中精度鱼雷及大航程巡航鱼雷等水中兵器得到迅速发展, 对潜艇及水面舰艇的航行安全造成了新的威胁。因此, 鱼雷装备需向大航程、远射距、强自适应性与高命中精度方向发展。一般情况下, 判断子弹和导弹等空中飞行目标是否命中靶标, 可以利用光学手段、多普勒效应仪来测量脱靶量[1-3], 分析其末弹道。由于针对鱼雷末弹道及脱靶量的现有测量方法仍有不足, 这就给新武器的研发带来困难。
目前鱼雷主要通过水声手段定位, 具体方法有超短基线测量系统、短基线测量系统和长基线测量系统, 不同态势下利用不同的测量系统可以达到比较高的精度[4-6]。这些系统对于水下目标的探测更多的被用于目标航行的前、中段, 属于远场定位方法。在近场定位情况下, 例如在鱼雷射击训练中, 判断鱼雷是否过靶, 以及过靶末弹道轨迹等信息的获取, 水声测量系统很难满足其要求。这是因为靶标附近声场环境复杂, 噪音与混响严重, 对水声定位精度造成强烈干扰。除此之外, 水声定位系统建设成本昂贵, 维护与保养也不甚方便。
水下目标潜艇、鱼雷、无人水下航行器(un- manned undersea vehicle, UUV)等都有固有磁场, 即使航行前被消磁, 随着航行时间的增加, 也会被地磁场磁化, 这为水下目标的探测、近场定位、轨迹测定及与平台之间的态势判断提供了新的思路。文中提出了一种新的鱼雷近场定位技术, 并构建了相应测量系统。鱼雷水下辐射磁场较近, 这为鱼雷近场高精度定位提供了基础。因为只有鱼雷辐射场进入磁测阵列才可被检测到, 避免误检测; 同时, 无需安装收发器、换能器与接收器, 利用鱼雷自身磁场即可实现被动测量, 降低了系统构建的成本, 便于维护与升级。利用滤波与特定频率响应等方法可以将鱼雷磁场从环境磁场中分离出来, 配合电磁干扰抑制与电磁兼容方法, 为动磁源定位提供了保障。文中方法丰富了水下近场定位领域的研究, 并与水声定位系统优势互补, 在某些水声方法不能满足测量要求的环境下可发挥重要作用, 为鱼雷靶场建设中的末弹道与脱靶量测量、过靶相对态势判断等研究提供参考。
1 磁偶极子定位模型
由于接收到的目标磁场具有固定的频率, 可以很好地与周围的环境磁场干扰区分, 滤波和降噪后, 可大幅度降低环境干扰, 使目标磁场信号更为凸显。首先采用带通滤波提取出目标的交变磁场信息, 然后运用同频同相的线性解调方法将交变磁场信息转换为类似于静态磁场的幅度变化曲线, 再采用磁偶极子模型反演出目标的位置信息和运动状态[7-8]。





若令

则磁偶极矩0产生的磁场强度可以表示为
记为
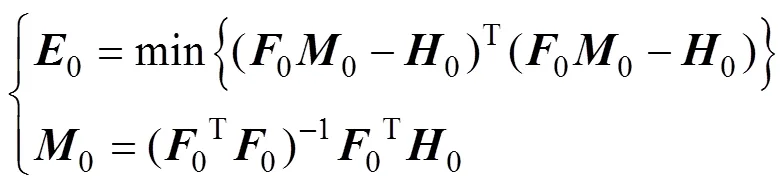
目标的磁定位问题就是求解下面非线性无约束方程组的最优化问题
2 鱼雷近场定位技术与测量系统
如式(7)所示, 要实现鱼雷的近场定位, 必须获得磁偶极子辐射场内动磁源三分量磁场强度向量, 即0, 再以式(6)提出的无约束非线性优化方程为依据可实现动磁源定位。
获取多点三分量磁场强度向量0需构建相应的磁测系统, 磁测系统原理示意图见图2, 若阵列附近水下有异常磁场信号, 这些信号被传感器采集, 数据采集卡内置辐射磁场气液跨介质传播时磁导率的转换过程限于篇幅不展开, 再通过滤波与降噪, 对磁场数据进行预处理, 由控制器局域网络(controller area network, CAN)卡收集数据与计算机通信, 计算机通过CANTest测试软件选择通道并控制数据的读入与处理, 以实现鱼雷的近场定位与末弹道测量。
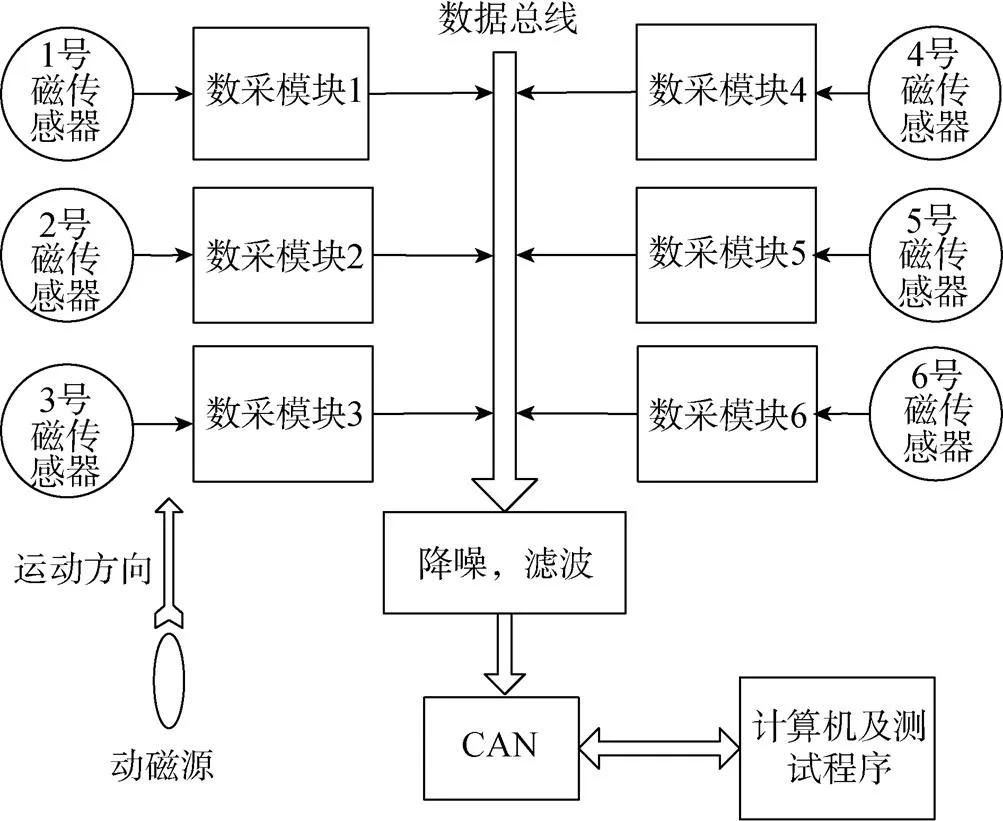
图2 磁测系统原理示意图
2.1 测量系统硬件设计
系统所需的硬件包括三分量感应式磁传感器; 数据采集卡; CAN卡; 稳压电源, 电能来自于220 V, 50 Hz的工频交流电, 用5 V, 1 A的稳压直流电源实现电能转换, 为磁传感器供电。CAN总线有2个通道: 0通道和1通道, 分别与并行的两路数据采集模块、磁传感器相连接, 进行数据的采集和传输; 另一端通过USB-CAN接口与电脑连接, 通过CAN通信方式通信, CANTest软件对数据进行接收、存储、显示和处理。
2.2 测量系统软件开发
测量系统用到的软件是CANtest软件, 是基于Labwindows /CVI 平台开发的信号测试软件。CVI(C programming language virtual instrument)平台把C语言平台与数据采集分析和显示的测控专业工具有机的结合起来, 为检测系统、自动测试环境、数据采集系统、过程监控系统等应用软件的开发提供了一个理想的开发环境[10]。
测试软件可以实现如下功能: 选择数据输入通道, 向CAN发送指令控制数据流的流入、寄存与存储; 利用指示灯的强弱指示各个传感器磁强; 将不同传感器采集到的磁强曲线绘制出来, 及时地观察磁场波形的时域变化。
2.3 基于动磁测量的鱼雷近场定位方法
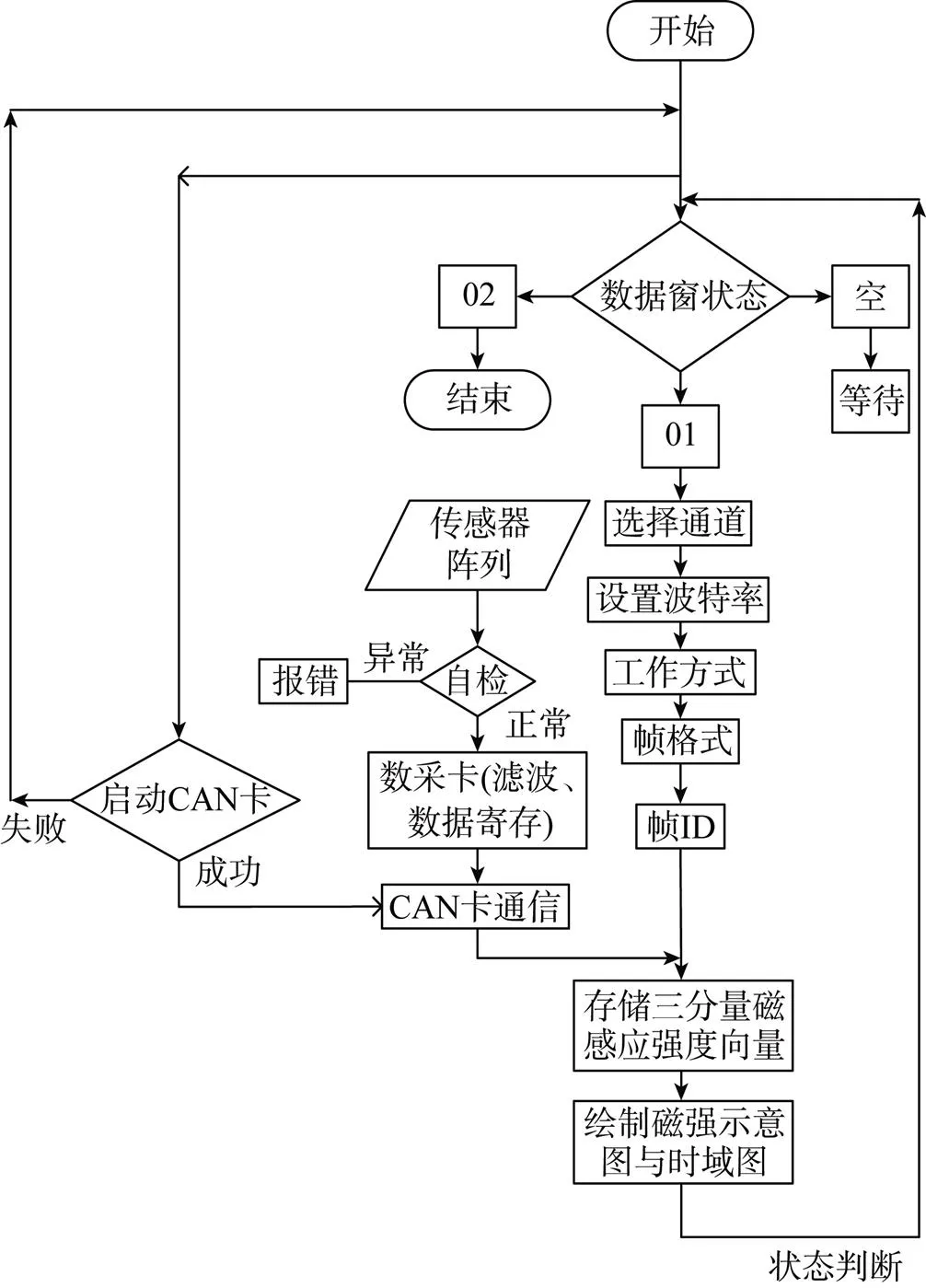
图3 CANTest程序流程图
3 动磁测量系统性能验证试验
选择试验环境时, 由于目前湖海试验条件不足, 故采用陆上试验的方式测试系统性能, 这也是水下系统常用的测试方法之一, 只要满足相应条件, 同样可获得有价值的信息。试验时, 应尽量减弱周围电气设备工频50 Hz及倍频程的电磁干扰; 动磁测量过程中, 为尽量模拟鱼雷水下运动状态, 应使动磁源平稳运动, 选择平坦、宽阔的地面测试, 避免振动造成的电磁干扰, 可对载体作相应的减振处理。
3.1 动磁测量方案
用磁性辐射棒作为动磁源, 波形发生器为其提供信号, 可产生不同类型的波形, 分别用于验证系统的频率响应、滤波、降噪与整波、定位准确性与系统稳定性等性能。建立如图4所示的坐标系, 试验方法如下。
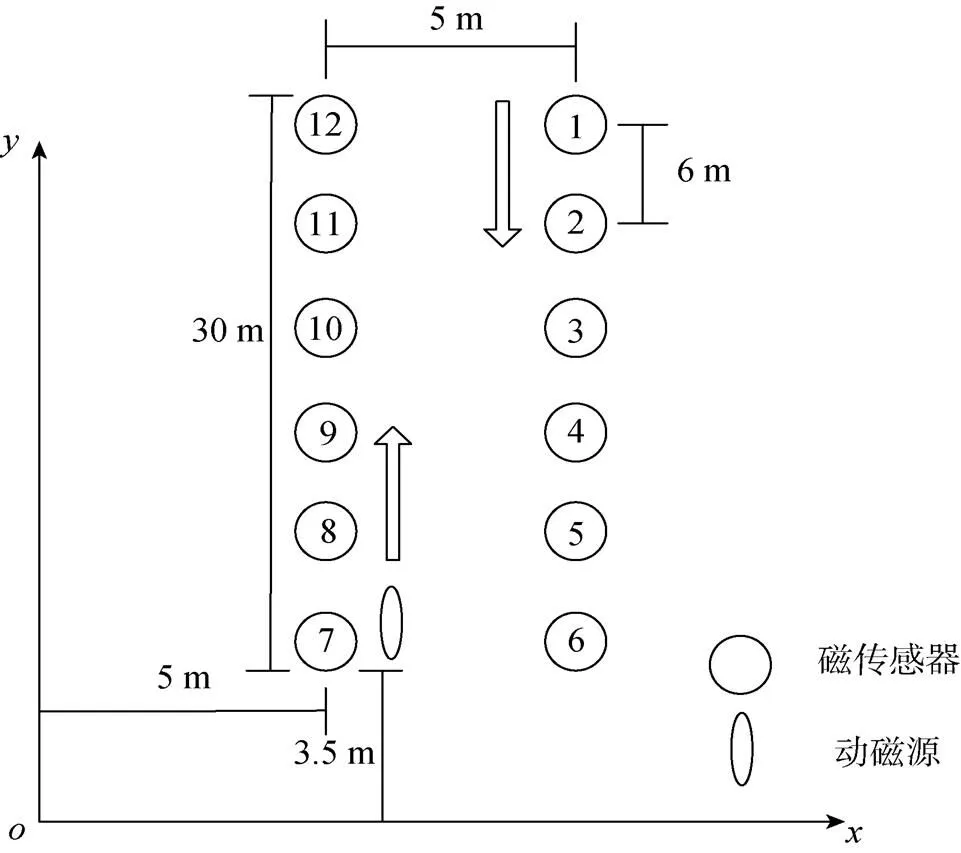
图4 磁测阵列布置示意图
1) 布置运动磁场测量设备。采用12组传感器和数采模块按照图4所示的阵列布置, 调试系统确定已启动CAN卡, 设置相应参数, 保证各传感器工作正常。
2) 用控制变量的方法, 波形发生器产生不同频率的信号, 测试系统对不同频率的响应, 以验证最佳频率响应频段。该频段是系统事先设定的, 应为UUV产生的磁场频段。辐射功率一定时, 探究测试距离与磁强的关系, 有助于获得系统测量精度、测量范围等指标, 观察系统降噪与整波前后波形变化, 验证整波效果。
3)用减振处理过的小车作为磁源载体, 接通信号发生器, 同时小车沿图4箭头指示的路径运动, 计算机对采集到的数据进行存储、显示及分析。
4) 动磁源抵达终止位置, 向数据窗口输入数字02, 指示其停止采集。关闭波形触发系统, 整理采集的数据, 一次航行器运动信号采集过程结束。
3.2 动磁源辐射频率对磁感应强度的影响
图5为动磁源辐射频率对磁感应强度的影响。首先进行系统基础性能测试, 采用正弦波, 幅值为16 V, 频率450 Hz, 占空比为50%, 偏置为0, 功放倍数为2倍。测得不同辐射频率对应的磁感应强度不同。图5中, 取数个时刻点, 磁感应强度对频率的响应如表1所示, 在=1.7 s之前为背景噪音,=1.7 s开始测试。

图5 辐射频率对磁感应强度的影响

表1 不同时刻磁感应强度对频率的响应
据此可得同一功率下, 在频率取某个特定值时, 磁感应强度可以达到最大值, 试验后得到=450 Hz时, 磁强测得最大值为25.4 nT。
为了将鱼雷的磁信号与周围的干扰信号区分开, 在信号预处理时, 频率低于400 Hz与高于500 Hz的信号会很快被过滤。这有利于在众多干扰信号中, 迅速寻的到目标磁信号。
3.3 磁感应强度对测试距离的响应
采用正弦波, 电压20 V,=450 Hz, 其他条件与之前相同, 用4号传感器测试测试磁感应强度与距离的关系。如图6所示, 取数个时刻点, 磁感应强度对测试距离的响应如表2所示。

图6 测试距离对磁感应强度的影响

表2 不同时刻磁感应强度对测试距离的响应
由式(2)所示, 磁强与辐射源磁矩成正比, 与距离的三次方成反比。无电磁干扰环境下, 背景辐射噪声幅值约为0.2~0.5 nT, 由式(7)和单个传感器测到的0对动磁源进行定位时发现, 不易将低于0.5 nT的信号与背景噪声区分, 信号预处理时会被过滤; 单轴信号低于1.2 nT时, 定位后距离差异低于0.1 m, 为简便运算, 将其视为同一个定位点。因此, 若设置1.2 nT为该系统的测量分辨率, 再依据图6与表2获得的测试数据, 可得要使该系统的定位精度达0.1 m, 系统的定位距离应保持在10~12 m以内。
3.4 小波降噪
加带通滤波模块后, 虽可以迅速寻到目标磁信号, 但测得的信号噪音干扰较大, 波形不平整, 不便于读数与观察, 如图7所示。
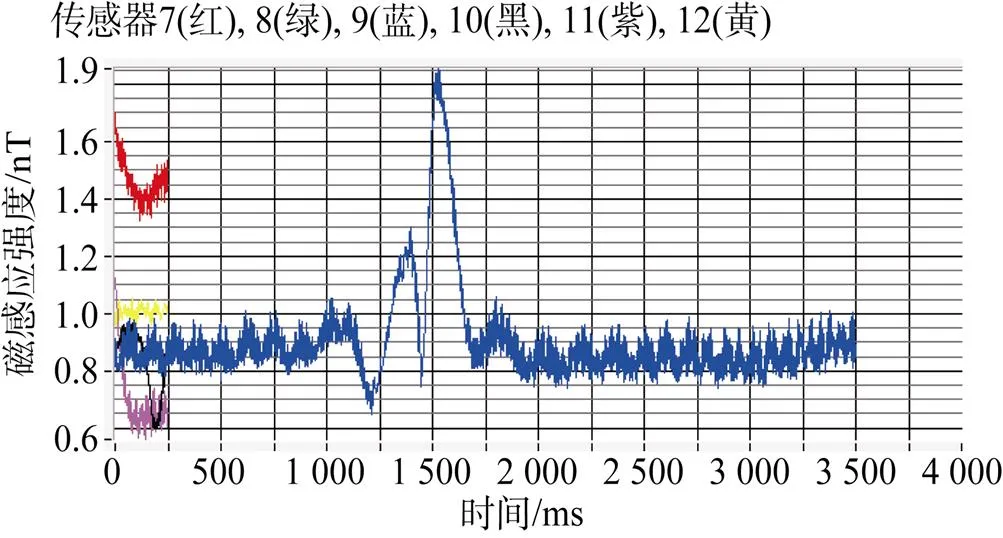
图7 降噪之前磁感应强度波形
拟采用小波降噪的方法对图像进行处理。其步骤如下。




5) 由以上各式求出新阈值
对各层各高频系数进行小波软阈值处理得到新的小波系数

在数采卡内添加降噪模块后, 其波形显示如图8所示, 可以获得较为理想的效果。图中曲线出现2个峰, 是动磁源N极与S极分别经过传感器附近的缘故。

图8 降噪之后的磁感应强度波形
3.5 动磁源定位试验
采用正弦波, 幅值为20 V, 频率450 Hz, 占空比为50%, 偏置为0, 功放放大倍数为2倍。
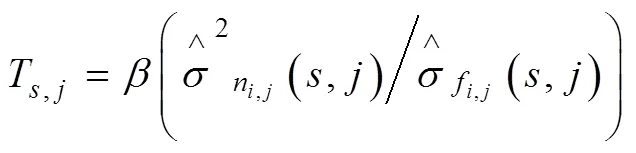
动磁源按如图4所示的路径运动, 缓速(约为3 m/s)均匀通过磁测阵列采集的数据如图9所示, 快速(约为6 m/s)均匀通过磁测阵列采集的数据如图10所示。
这样设置可检验系统对不同速度动磁源的响应, 测定系统灵敏性、稳定性、测量精度等信息。磁感应强度峰值最高可以达到30.49~30.73 nT, 曲线的爬升和回落比较迅速, 可判断磁场测量具有较高的灵敏度。
在图11和图12中, 为方便与实际位置比较, 选取0~14这15个时刻点的三分量磁强值作为输入, 光滑实线是算法定位后辐射源运动轨迹, 是15个定位点连起的折线; 而在0~14时刻, 实际测量位置点用“*”标注, 光滑的虚线是辐射源实测点连起的折线。定位误差结果由表3和表4所示。图11和图12中的坐标满足图4所建的坐标系。
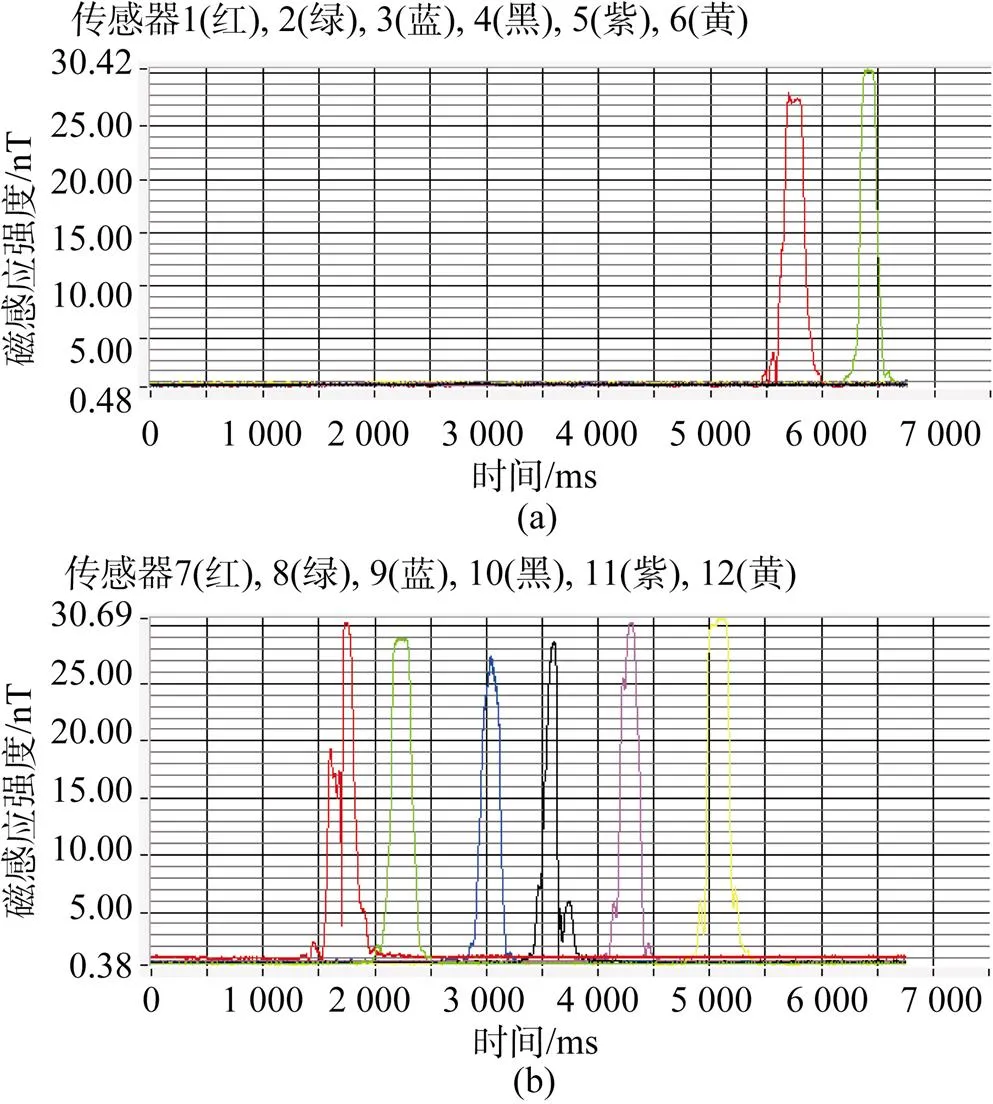
图9 动磁源缓速均匀通过磁测阵列磁感应强度波形图
图10 动磁源快速均匀通过磁测阵列磁感应强度波形图
缓速通过时, 最小的定位误差为0.38%, 最大定位误差为2.07%, 平均误差为0.94%。快速通过时,最小的定位误差0.53%,最大的定位误差为2.32%, 平均误差为1.13%。所有定位误差都低于2.5%, 故该系统具有较高的定位精度。缓速通过的平均定位误差要低于快速通过的平均定位误差, 可得随着动磁源运动速度的增加, 定位精度会略有所降低。这主要是因为随着速度增加, 磁源载体的振动增加, 产生了更多的振动磁场干扰。鱼雷等目标在水下航行时, 这种情况会有所减缓, 这是因为鱼雷姿态控制比较好, 速度虽高, 却不会产生更多振动磁噪音, 故该系统同样适用于近场定位鱼雷。
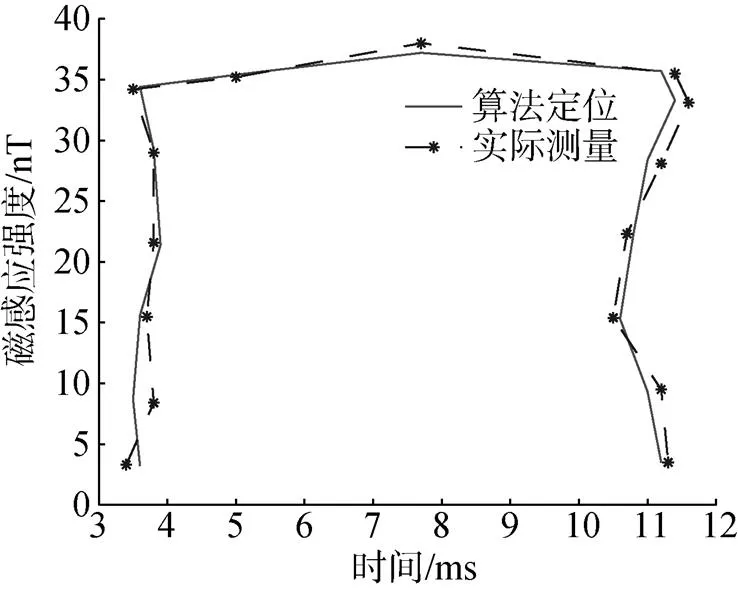
图11 磁源缓速通过算法定位与实际测量轨迹比较
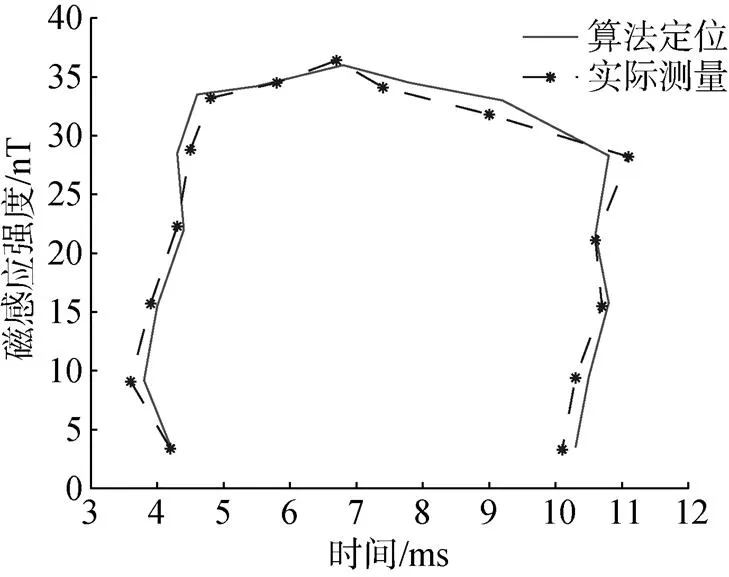
图12 磁源快速通过算法定位与实际测量轨迹比较

表3 辐射源缓速通过磁测阵列的相对定位误差
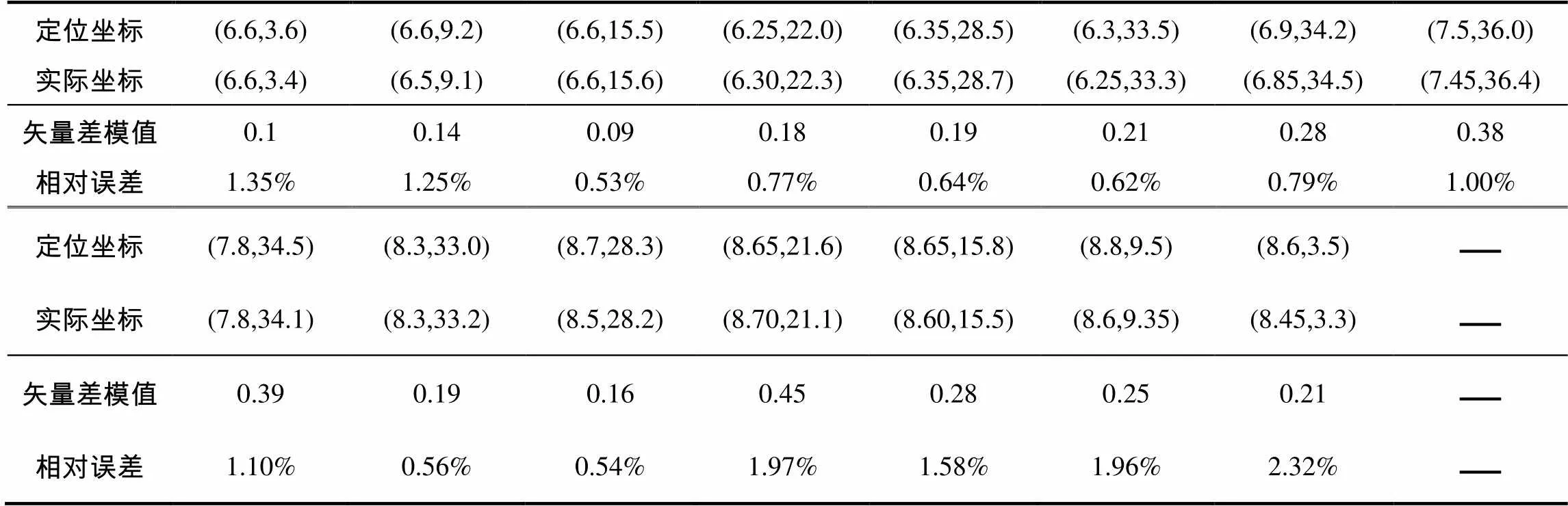
表4 辐射源快速通过磁测阵列的相对定位误差
4 结束语

[1] 房秉毅, 王剑, 吴嗣亮. 基于距离跟踪的矢量脱靶量测量方法[J]. 弹道学报, 2007, 19(6): 29-33. Fang Bing-yi, Wang Gang, Wu Si-liang. Vector Miss Distance Measurement Based on Range-only Tracking[J]. Journal of Ballistics, 2007, 19(6): 29-33.
[2] 刘松海, 洗观福, 孙向前. 鱼雷攻潜末弹道测量中的抗多途专家系统[J]. 舰船科学技术, 2012, 34(3): 111-114.Liu Song-hai, Xi Guan-fu, Sun Xiang-qian. Anti-multi- path Expert System for Terminal Trajectory Measurement of Torpedo[J]. Ship Science and Technology, 2012, 34(3): 111-114.
[3] 李志宇, 吴嗣亮, 魏国华. 脱靶量测量中体目标效应的分析[J]. 弹道学报, 2007, 19(9): 57-61.Li Zhi-yu, Wu Si-long, Wei Guo-hua. Analysis of the Effect of Body Target on Miss Distance Measurement[J]. Journal of Ballistics, 2007, 19(9): 57- 61.
[4] 田春和, 秦建. 基于长基线水声定位系统水下定位技术初步应用研究[J]. 水道港口, 2015, 36(6): 268-271.Tian Chuan-he, Qin Jian. Applied Research of Long Baseline Acoustic Positioning System Based on Underwater Positioning Technique[J]. Journal of Waterway and Har- bor, 2015, 36(6): 268-271.
[5] 高国青, 叶湘滨, 乔纯捷. 水下声定位系统原理与误差分析[J]. 四川兵工学报, 2016, 31(6): 95-98.
[6] 吴永亭, 周兴华, 杨龙. 水下声学定位系统及其应用[J]. 海洋测绘, 2003, 23(7): 18-21.Wu Yong-ting, Zhou Xing-hua, Yang Long. Underwater Acoustic Positioning System and its Application[J]. Hydrographic Surveying and Charting, 2003, 23(7): 18-21.
[7] 吴旭东, 侯文生, 郑小林. 磁偶极子的定位模型及实验验证[J]. 仪器仪表学报, 2008, 29(2): 326-329. Wu Xu-dong, Hou Wen-sheng, Zheng Xiao-lin. Discussion of Magnetic Dipole Model and Its Location Detecting Application[J]. Chinese Journal of Scientific Instrument, 2008, 29(2): 326-329.
[8] 唐露新, 张淏. 交变磁场测量的研究进展[J]. 测控技术, 2013, 32(4): 1-4.Tang Lu-xin, Zhang Hao. Research Progress of Alternating Magnetic Field Measurement[J]. Measurement & Co- ntrol Technology, 2013, 32(4): 1-4.
[9] 任来平, 赵俊生, 侯世喜. 磁偶极子磁场空间分布模式[J]. 海洋测绘, 2002, 22 (3): 18-21. Ren Lai-ping, Zhao Jun-sheng, Hou Shi-xi. The Distribu- tion Model of Magnetic Dipole in Magnetic Field[J]. Hydrographic Surveying and Charting, 2002, 22(3): 18-21.
[10] 王坷, 贺向东, 齐鑫. LabWindows/CVI在导引头地面测控设备中的应用[J]. 计算机测量与控制, 2017, 25(1): 91-93. Wang Ke, He Xiang-dong, Qi Xin. Applicaion of Lab Wi- ndows/CVI in Ground Measurement and Control Equip- ment of Seeker[J]. Computer Measurement & Control, 2017, 25(1): 91-93.
(责任编辑: 杨力军)
Torpedo Near-Field Positioning Technique Based on Dynamic Magnetic Measurement and Magnetic Dipole Inversion Model
XU Zheng, LI Wei, QIN Nan, MA Qi
(Naval Submarine Academy, Qingdao 266100, China)
To enrich torpedo near-field positioning method, a new torpedo near-field positioning technique is proposed based on dynamic magnetic measurement technique(DMMT) and magnetic dipole inversion positioning model, and corresponding measurement system is constructed. The results of onshore test show that this technique can realize accurate location of the moving magnetic source in near field, and the measurement system has high accuracy and stability. This technique may provide a reference for the research of end-trajectory and miss distance measurement in torpedo shooting range construction and relative situation judgment of pass target.
torpedo; magnetic dipole; dynamic magnetic measurement(DMMT); near-field positioning
许政, 李伟, 秦楠, 等. 基于动磁测量与磁偶极子模型的鱼雷近场定位技术[J]. 水下无人系统学报, 2018, 26(4): 316-323.
TJ630.6; TB22
A
2096-3920(2018)04-0316-08
10.11993/j.issn.2096-3920.2018.04.007
2018-03-30;
2018-05-21.
国防科技预先研究课题资助(3020605030103).
许 政(1993-), 男, 在读硕士, 研究方向为潜用武器作战使用及保障.