最小二乘法在微机电陀螺温度补偿中的应用
2018-09-03刘思奥耿诗涵王宇航
孙 伟,刘思奥,耿诗涵,王宇航
(辽宁工程技术大学 测绘与地理科学学院,辽宁 阜新 123000)
0 引言
工作环境温度的变化成为影响微机电(micro electro mechanical system,MEMS)陀螺仪输出精度的主要因素[1-3]。探索温度变化对MEMS输出精度的规律,建立温度变化误差模型并完成误差标定处理,成为提高MEMS陀螺仪输出精度和稳定性的主要方法[4]。围绕上述问题,国内外学者根据特定的器件和工作环境开展了相应的研究,并提出对应的解决方案[5-8]。
本文结合实验室测试环境及项目背景需求,建立MEMS陀螺仪三轴误差模型后,在-40~60 ℃大温度区间环境下探索温度变化对MEMS陀螺仪零偏输出的影响。
1 MEMS陀螺温度特性分析
MEMS陀螺仪机械结构会随着温度改变产生尺寸变化与构成材料的弹性模量变化,由于惯性器件内部材料尺寸变化对惯性器件性能影响相对较小,实验过程予以忽略;但是MEMS惯性器件材料的弹性模量变化对惯性器件性能的影响却不容忽略[9]。由于惯性器件内部构成材料弹性模量的改变会影响MEMS惯性器件构成硬度,硬度的变化会促使MEMS陀螺仪谐振频率随之改变。
弹性模量随温度变化的近似线性关系为
E(T)=E0-E0k(T-T0)
(1)
式中:E(T)、E0分别表示温度分别为T、T0环境下硅的弹性模量;且T0=300 K,k=70×10-6。而弹簧刚度系数K与弹簧模量K0之间的正比关系为
K=K0[1-k(T-T0)]
(2)
温度为T时的陀螺谐振频率ω(T)和温度构成的函数关系为

(3)
式中m为检测质量块质量。在温度T0附近的小范围内,对式(3)进行线性化处理得

(4)
由式(4)可看出,MEMS陀螺谐振频率随温度变化产生的零偏将直接影响输出角速率的准确性。分析输出数据随温度的变化趋势,建立温度误差模型并补偿MEMS陀螺仪输出误差成为提高精度的主要工作。
2 变温环境下MEMS陀螺输出最小二乘拟合
根据系统实际工作环境温度变化范围,设定-40~60 ℃变温环境下的测试环境。依据标定、补偿实验数据获取及温度补偿处理需求,依次获取以5 ℃为间隔的温度测试点对应的MEMS陀螺仪静态输出信息。考虑MEMS陀螺仪在变温环境下其零偏误差可能存在逐次启动差异,分3个时间段按相同温度测试点分别独立开展3次温度实验。每次实验重新上电,温控箱温度达到各温度测试点稳定后采集该温度下陀螺输出。
静态大温度区间离散温度实验中,由于MEMS陀螺仪受到温控箱震动等因素影响,导致输出数据点中存在产生野值的可能。为精确分析温度对于MEMS陀螺仪输出数据的影响,采用拉依达准则(3σ准则)剔除输出数据中存在的异常点[10-11],即:

4)当ρi>3σ时,剔除xi。
将剔除异常点后的MEMS陀螺仪输出角速率进行不同温度点下的均值计算,得到图1所示MEMS陀螺仪输出数据随不同温度采样点的数据变化曲线。图1中3条线分别表示3次温度实验中在各温度点的陀螺输出。不难看出,实验所用的MEMS陀螺其零偏具有较好的温度重复性。

图1 MEMS陀螺仪输出
根据MEMS陀螺仪输出的随温度变化曲线,采用最小二乘估计法估计拟合方程式(5)中的温度误差模型系数值,即
(5)

为方便表示,将式(5)改写成矩阵形式为

式中:t=[1t…tn];Pi=[pi(0)pi(1) …pi(n)]T。最小二乘拟合以残差平方和最小为原则确定模型系数,即

则解式(7)得
Pi=(TTT)-1TTωi
(8)

取n=4,根据式(8)解得各轴陀螺输出随温度变化的最小二乘拟合系数,如表1所示。拟合后的MEMS陀螺仪输出随温度变化结果如图2所示,残差值如图3所示。
结合图2和图3可知,最小二乘法能够较好地完成MEMS陀螺仪输出离散采样点数据的拟合,拟合后数据的残差范围均控制在3.462 3×10-4(°)/s以内。
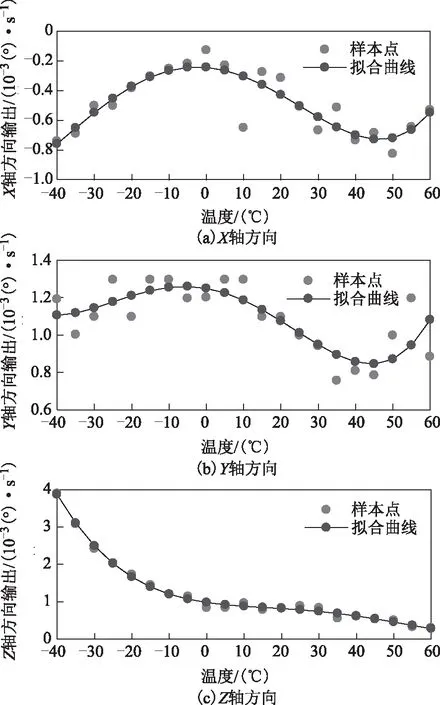
图2 MEMS陀螺仪拟合曲线

图3 陀螺仪输出数据曲线拟合残差值
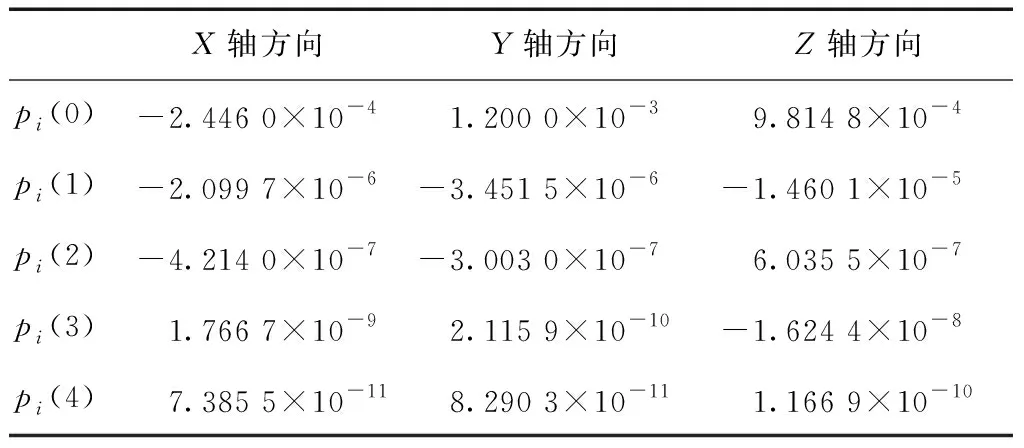
表1 最小二乘拟合系数
3 实验与结果分析
将待测试的MEMS陀螺仪置于温控箱内并设定-40~60 ℃变温测试环境,以5 ℃为温度变化间隔,分别在对应温度点采集MEMS陀螺仪输出结果(如图4所示)。为分析典型环境下的对比结果,提取温度设置分别为-40、-20、0、20、40、60 ℃条件下温度补偿模型修正前后的MEMS陀螺仪输出信息进行对比,如表2所示。
图4 高低温控试验箱
通过分析表2可看出,不同典型温度环境下温度误差模型补偿后的三轴MEMS陀螺仪输出均值较未补偿结果都有明显改善。本文提出针对MEMS陀螺仪温度误差标定补偿技术的研究结果可为进一步提高MEMS陀螺仪输出稳定性和可靠性提供参考。
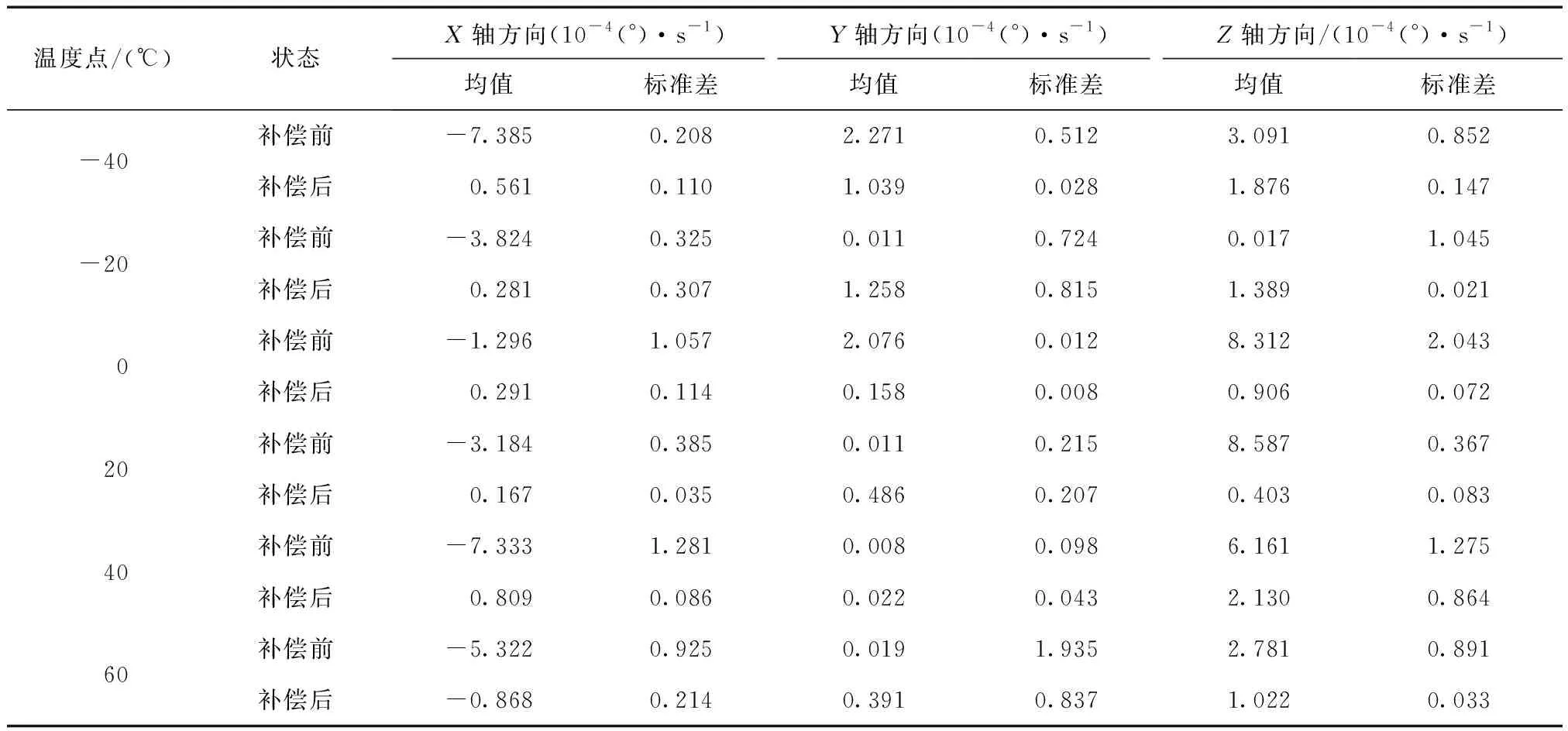
表2 MEMS陀螺大温度区间不同温度点补偿前后静态输出均值
4 结束语
本文围绕温度变化对MEMS陀螺仪输出精度的影响,提出基于最小二乘拟合的温度标定补偿方法:分析MEMS陀螺仪的温度特性并建立其数学误差模型;采集大温度变化区间里多个典型温度点下的MEMS陀螺仪输出并分别进行均值化处理后;采用最小二乘拟合方法得到典型温度点下的输出变化曲线并分析其残差值。温度补偿前后对比实验结果表明,补偿后的3个敏感轴方向上的陀螺仪输出精度有显著提高,这对于提高MEMS陀螺仪多温度区间工作状态下的输出精度和稳定性有重要作用。