基于事后RTK的广域无线传感网络节点低功耗高精度定位模块设计
2018-08-31万育彰张晓明熊继军晁正正闫佳晖
万育彰,张晓明,熊继军,陈 雷,晁正正,闫佳晖
(中北大学 仪器科学与动态测试教育部重点实验室, 太原 030051)
广域无线传感网络应用于侵彻武器的爆炸场采集、道路探伤、地震监测等广域探测工程[1],通过获取相应的物理场探测或监测目标与网络节点的相对位置,结合网络的几何布局,确定目标物的实际位置以及进行环境监测,因此无线传感测试网络节点是广域目标探测、定位的“基准点”,只有传感节点实现高精度定位才能保证目标物位置的有效性和精度[2]。传统的道路探伤、侵彻武器炸点定位等广域物理场采集、监测工作中,传感测量网络需要多个数据控制中心,每个数据控制中心连接上百个传感测试节点进行有线连接,节点按照网络布局方案安装,节点位置通过人工测量确定(设定某个点或地标为基点,使用全站仪等地质测量仪器确定各节点与基点的位置关系)[3],这样工作耗时长,节点位置精度浮动大,而且当测量范围大、测量地形复杂时,部分无线传感测试网络节点无法使用直接目测或手动测量的方法来确定节点位置,因此考虑使用卫星定位方式为传感测试节点提供位置信息,广域无线传感网络需要高精度探测如裂纹、震源、炸点等目标位置,其节点的定位精度需要达到毫米级,而普通卫星定位精度为米级,无法满足节点定位需求,RTK定位能够实现毫米级定位,但传统RTK要求节点实时接收并处理基站发出的观测数据,这需要节点的无线传输通讯模块在节点定位过程中持续工作数小时甚至几天,且布网范围较大导致无线传输模块的功率高,即使使用短波传输,其功耗也在十瓦级,一般达到几十瓦以上,大功耗对应的高耗电使得因为执行监测任务而需要长时间工作的无线传感网络节点由于电量问题无法实现小体积,另一方面,传统事后RTK无法为传感节点提供同步时钟,从而采集的物理场数据无法具备时间有效性,并且传统的事后RTK定位速度慢[4],而根据本文设计,较快地获取高精度节点位置信息,有利于进一步降低定位模块的功耗。
针对上述问题,考虑到无线传感网络节点的定位属于静态高精度定位,节点采集的物理信息需要时钟统一,定位精度要求达到毫米级并对功耗要求尽可能低的特点,本文提出在事后RTK的基础上,使用定位模块输出的PPS秒脉冲进行时钟同步,使定位模块工作10~15 min,将观测数据和星历文件保存到存储设备,任务结束后将数据传输至数据控制中心,进行RTK定位解算[5],从而获取高精度节点位置与时间零点,通过卡尔曼滤波算法提高定位速度,从而确保使用较短时间输出的观测数据即可完成高精度定位,达到降低节点功耗的目的,同时还能保证节点的定位精度达到毫米级。
1 RTK定位原理与优势
1.1 普通GNSS定位方法
普通GNSS定位使用的是码测量法,使用单个GNSS接收机即能实现定位,但定位精度为米级[6],这种方法是通过GNSS接收机对接收到的C/A码与接收机产生的复现码进行相关运算,得到信号从卫星发射到达接收机的时间,结合无线电波的传播速度就得到了接收机与该卫星的距离[7],但由于距离的测量受到时钟差、电离层、对流层等干扰,码测量得到的距离与实际距离有偏差,将计算得出的距离称为伪距,其表达式为:
ρ=r+c(tu-δt)=c(Tu-Ts)
(1)
当接收机能与四个卫星(未知量除接收机的位置变量xd、yd、zd坐标外还有时钟差)建立稳定通信后,即可通过如式(2)所示伪距与位置的关系式构建的方程组,求解出接收机的坐标以及接收机与卫星的时钟差[8]。
(2)
即伪距的测量精度决定了码测量法的定位精度[9],但由于码测量法得到的伪距测量值与实际值有较大差距,码测量法的定位误差往往会达到3~5 m[10],不能满足大地测量中测量节点高精度定位的要求。
1.2 RTK定位原理
RTK定位为载波相位差分定位法,需要使用两个GNSS接收机,在待定位节点处和基站处安装GNSS定位模块,两处同时输出原始观测数据和星历文件,将基站与节点的GNSS定位模块输出的观测数据中的载波相位进行差分,结合基站的位置信息,通过相位差分得到基线向量,这样得到的向量终点即为节点位置。这种定位模式示意图如图1[11]。
通过计算节点处卫星接收机与基站处接收机的观测数据中载波相位的差值进而求出基线向量,当A为基站,B为节点,AB两处接收机同时观测j,k卫星时符合关系式为[11-12]:

(3)

l=λ(n0-Δφ)
(4)
若卫星信号从卫星上发射时载波相位为φ0,到达接收机的载波相位为φ1,则式(4)中n0为(φ1-φ0)的整周期数,Δφ为(φ1-φ0)结果中不足一周期的小数部分,Δφ可以由接收机中的载波跟踪环准确测得,但n0不能直接测得,只能通过间接办法进行估计,因此也称之为整周模糊度,由此可以看出,RTK测量精度的关键在于整周模糊度估计值与实际值的误差[12],当整周模糊度确定后,载波相位测量法测距精度与所测信号波长有关,波长越小,测距精度越高,且不超过波长[13]。因此从信号本身的精度上看,相位测量法的精度就优于码测量法,同时作为差分测量法,基站处的GNSS接收机还能为节点接收机提供误差补偿信息,如多普勒频移、电离层延迟等数据[13],通过事后对基站接收的载波相位与节点接受的载波相位进行差分,得到基站与节点构成的基线向量,并使用已知位置的基站作为向量起点,补偿了误差,使得其影响被削弱到最小。载波相位测量法的精度在误差源影响较小情况下,其定位精度为载波波长的1/100,以GPS载波信号为例,其卫星信号民用的常用频点为L1—1 575.42 MHz以及L2—1 228 MHz[14],无线电波以光速在真空介质中传播,根据式(5)计算,可得出GPS卫星信号载波波长为0.19 m,因此一般情况下定位精度能达到0.001 9 m即实现毫米级定位。
λ=c/f
(5)
因此RTK的定位精度可以达到毫米级,满足广域测量网络节点的定位精度要求[15]。
2 无线传感测量网络构成
广域无线传感网络主要由数据控制中心、无线通信中继站、GNSS基站以及传感节点等构成[16]。其中数据控制中心控制网络各节点的工作状态以及对节点所采集数据的处理,节点负责其安装区域的物理信息采集,GNSS基站为节点RTK定位提供基点信息,而无线通信中继站则保证了系统大范围测量时,数据控制中心与各节点能够成功通讯,具体结构如图2所示。
因此节点作为整个系统的“感知单元”,其信息获取的准确性决定了系统能够准确完成监测任务。无线传感测试节点硬件构成框图如图3。
通过传感模块采集指定的物理场,GNSS定位模块为节点提供位置信息以及为传感网络各节点提供统一时钟,并将这物理场采集数据和位置数据处理后存入存储模块,定位模块工作10 min后进入待机模式,仅提供同步时钟,从而在保证传统事后RTK所具备的高精度和较实时RTK低功耗基础上,进一步降低了功耗还保证了传感网络各节点采集的物理场数据实现时间同步,而无线通讯模块用于接收数据控制中心的控制指令,只在测试开始和结束时工作。节点的模块构成中,MCU处理、供电、信号调理、信号采集等模块不是本文重点,不在此进行详细描述,重点展开对实现事后RTK相关的硬件电路模块,即GNSS模块和存储模块的详细说明。
2.1 GNSS模块硬件设计
GNSS定位模块是实现事后RTK并在其基础上为传感网络各节点提供统一时钟的硬件模块,因此需要选择一款能够输出观测数据和星历文件(事后RTK使用)和高精度PPS秒脉冲的卫星信号接收芯片作为模块核心,经过查找相关芯片选择符合上述要求的Ublox NEO_M8T作为模块的GNSS接收芯片,该芯片需要稳定的5 V电压供电,因此模块硬件电路还需包含5 V稳压芯片以及相关外围的阻容,构成RC滤波网络,以保证供电电压的稳定,再配合必需的卫星信号接收天线接口及卫星信号输入线,这样就构成了如图4所示的测试节点定位模块结构框图。
定位模块通过串口进行数据的输出与输入,输入的内容主要是控制指令,用于配置NEO_M8T的相关工作状态以及部分附加功能的开启或关闭,在进行配置时,考虑到数据可存储性以及后期处理的便捷,将模块输出数据(观测数据和星历文件)格式配置为十六进制的UBX文件,由于传统的事后RTK仅作为一项较实时RTK低功耗的高精度定位技术使用,而没用充分使用其具有授时功能的PPS秒脉冲,尤其在物理场采集或监测工程中,物理场随时间变化,传感网络各节点时钟统一十分必要,因此,在事后RTK基础上利用芯片能输出高精度PPS秒脉冲,其时钟精度≤20 ns,将其配置供节点内物理场采集模块的高精度ADC使用的8 MHz时钟信号,并将PPS秒脉冲输出引脚与ADC的时钟输入引脚相连,在读取模块输出的时间信息,即可实现各传感节点采集数据时间同步,而前面配置的UBX格式的观测数据和星历文件则通过串口保存到存储设备中。天线接口选用常见的MCX接口,特征阻抗为50 Ω,因此在进行PCB设计时需要注意卫星信号线的阻抗匹配问题。
2.2 存储模块硬件设计
当定位模块设计完成并能够工作后,定位模块即可通过串口输出RTK所需的数据信息,这些数据通过串口存储模块保存至TF卡等存储设备中,事后将存储的数据导入电脑进行RTK处理,串口存储模块原理框图如图5。
通过定位模块和串口存储模块的硬件设计,将串口存储模块的串口与定位模块的串口对应线相连,即可实现将定位模块输出的RTK所需数据存储至存储设备中的功能。
2.3 低功耗定位方案设计
无线传感网络节点体积小,且由电池独立供电,因此在长达数小时甚至几天的物理场采集或目标区域物理场监测等任务中,低功耗尤为重要。即便是在实时RTK基础上通过减少无线链路通讯时间降低了功耗的事后RTK在如此长时间工作情况下,功耗仍然太高,这也是目前主流的物理场测量工程中,传感网络节点不使用卫星定位的主要原因。因此针对工程特征,传感网络节点在安装完毕后静止,属于静态定位,因此一旦获取其高精度位置结果后,定位模块可以进入待机状态,不在解算卫星信号以降低功耗,即通过控制定位模块的工作时间来实现降低节点的平均功耗,具体方案流程如图6所示。
在工程开始时,首先进行模块自检,由于希望尽可能地减少使用无线通讯的时间,因此使定位模块在正常工作状态运行,并通过无线通讯模块接收1~2 min由定位模块输出的数据,通过查看数据帧是否完整有效,判断定位模块是否工作正常,在确定定位模块正常工作后,模块输出数据存入存储卡中并保持工作状态15 min(经过测试15 min输出的数据可得到高精度定位结果),随后定位模块进入待机状态,仅为随后进行物理场采集工作的传感网络各节点的传感采集模块提供统一的时钟信号即可,由此,在长达数小时甚至数天的物理场采集、监测任务中,传感网络各节点的定位模块的正常工作时间仅不到20 min,因此大大降低了由定位模块产生的耗电,即在事后RTK的基础上进一步降低了功耗。
3 定位实验及数据处理
3.1 定位实验
为验证事后RTK定位精度以及功耗,展开了室外GNSS定位实验,首先将基站与节点的天线固定在不同位置的支架上,并在实验开始前,测量了基站与节点的距离为6.85 m,为后期验证定位精度提供对照,随后基站与节点的接收机同时上电,接收卫星信号并将星历文件和观测数据存入存储卡中,工作16 min后下电,分别读取基站与节点的存储卡,并对其中数据进行处理得到最终的定位结果,实验现场如图7。
3.2 数据处理
接收机输出的数据处理是将模块输出的UBX数据分离并转换为RTK定位所用的RENIX文件最终通过RENIX文件得到位置信息,其具体流程如图8所示。
为方便数据处理,将接收机输出数据格式设置为十六进制的UBX协议,并根据RTK解算,需要接收机提供原始观测数据以及星历文件,配置模块仅输出UBX协议下的AID-ALM、RXM-SFRBX以及RXM-RAWX三种数据帧,其中第一项为星历文件,第二项为导航数据子帧,第三项为观测数据,这三类信息对应的数据在定位作业过程中不断输出,并通过串口存储模块存储到SD卡中,数据输出的频率可设置为1~10 Hz,考虑到数据输出频率高有利于提高定位精度,将数据输出频率设置为10 Hz。在定位作业结束后,读取存储卡中存储的数据文件—UBX文件,将UBX文件导入到RTKLIB中,即可得到单个模块的RENIX格式的O文件和N文件,其中O文件为观测文件,主要内容为该模块观测到的卫星信号的载波相位、C/A码伪距、多普勒频率以及信噪比等内容。N文件为导航文件,用于提供该模块观测到的卫星的轨道参数,结合时间即可确定卫星此时的具体位置,同时由于卫星轨道变化缓慢,因此还能对该时间点以后的一段时间内卫星位置进行预测,通过模块输出的UBX数据文件处理后生成的O文件和N文件内容如图9(a)、(b)所示。
因此结合O文件和N文件内容即可获取接收机与卫星的距离以及对应卫星的位置,从而根据式(2)所示定位原理即可求出接收机的大致位置,同时通过结合Kalman滤波提高定位精度,其具体流程如图10所示。
图10流程中最后求得的固定解即为精确定位结果,而之前的浮点解即表现为一段漂浮的定位散点结果。
通过对固定解进行数据分析求出,普通定位下X轴标准差为1.304 m,Y轴标准差:1.391 3 m,Z轴标准差:1.987 3 m,显然普通定位精度达不到传感测试网络节点的定位精度要求。进而探究RTK定位精度,RTK需要节点与基站两处接收机的观测文件,以及两者中任意一个接收机输出的导航文件,从而通过载波相位差分得到基线向量,再给出基站的位置,基线向量起点为基站位置,即可求出终点,即节点的精确位置,通过数据分析得出,RTK定位结果中,X轴标准差:0.002 7 m,Y轴标准差:0.005 1 m,Z轴标准差:0.003 5 m,均到达毫米级定位误差,满足监测网络对网络中节点的定位精度要求。定位结果散点图如图11所示,将两种定位方法的数据分析结果如表1。
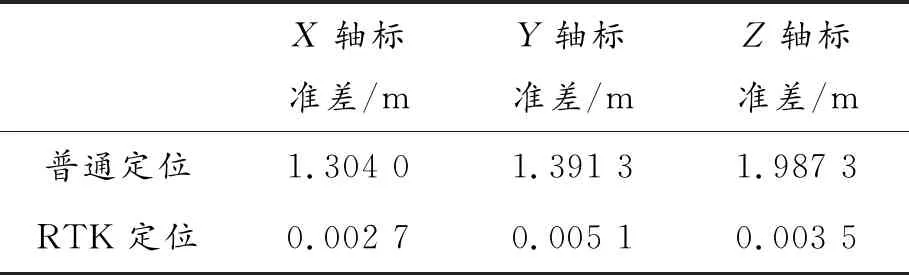
表1 两种定位方法定位精度
同时对PPS同步时钟信号进行了测试,结果如图12,由图12中可以看出,时钟精度可达纳秒级。
由于传统WGS84坐标系给出的定位结果为经纬高,不方便数据分析,因此在ECEF坐标系下给出定位结果并以此进行数据分析,而后转换为以基站位置为原点的基站坐标系形式给出,计算基站与节点距离,求RTK定位结果的均值并得出RTK解算下节点与基站距离为6.853 5 m,与实验前测量的基站与节点实际距离相差3.5 mm,验证了事后RTK定位结果精度可达到毫米级,同时,单个节点的定位模块仅使用一根无源GPS天线,并通过统计事后RTK硬件所使用的各个芯片的功耗得出,事后RTK硬件功耗为132 mW,而市面上RTK产品的功耗普遍在5~30 W之间,即事后RTK定位在保证高精度定位结果的前提下实现了低功耗。
4 结论
1) 本文给出了RTK定位符合节点定位精度要求,但同时存在功耗大、无法实现网络节点时钟同步的问题。
2) 在硬件系统设计及定位方案上创新,使用定位模块输出的秒脉冲,使各节点采集数据实现时间同步。
3) 通过加入卡尔曼滤波提高定位速度,以及运行一段时间定位模块,当数据足够获取高精度位置信息后使定位模块待机,从而在传统事后RTK基础上实现高精度定位并有效降低功耗。
4) 通过定位实验结果验证了事后RTK能实现毫米级定位,满足野外物探以及大地测量对测试网络节点的定位精度要求,且时钟同步精度也达到要求,并且硬件系统功耗低达132 mW。
5) 这一创新使较小体积的电池能保证节点系统工作数小时,节点在小体积基础上能够顺利完成物理场的采集、监测任务。
