边坡变形可监测性指标计算方法研究与实验分析
2018-08-30唐夏丽花向红康环环吴伟
唐夏丽,花向红,康环环,吴伟
(1.武汉大学测绘学院,湖北 武汉 430079; 2.武汉大学灾害监测和防治研究中心,湖北 武汉 430079)
1 引 言
因我国现代化经济建设的需要,工程建设开发项目不断增加,在矿山、水利、市政、铁路等领域涉及大量的边坡问题。据媒体统计,我国的山体滑坡和泥石流灾害年均接近上万,其中更有特、重大灾难,平均每年有近800人死亡或失踪,直接经济损失超过40亿。边坡的稳定程度不仅关系到工程自身的安全,同时也会对边坡工程周边环境产生非常严重的影响,造成施工进度的延迟和导致工程建设经济损失,更甚至于威胁到周边居民的人身安全[1]。边坡变形监测是边坡研究工作中的一项重要内容,边坡地质条件复杂,掌握边坡变化规律,及时地采取防灾措施,尽可能减少其造成的灾害损失,一直是国内外学者和国家关注的焦点问题[2~4]。
传统的地质变形监测方法,如经纬仪,水准仪,测距仪或全站仪等测量技术,存在自动化程度及效率低、耗时多、投入大量的人力物力等缺陷,已无法满足现代测量的要求。目前在变形监测领域广泛应用的是GPS和测量机器人[5]。GPS和测量机器人对地质滑坡与变形情况的自动化、全方位变形监测发挥了巨大作用,操作简便、效益增加,而且精度更高、速度更快。但这些方法只是测量相关点,主要是离散单点监测,测点数量小,及时性差。对于斜坡的完整属性需要收集大量的映射点和没有设置监测点区域的变形分析都难以实现,不能完全反映监测对象的变形,表现出一定的局限性。三维激光扫描技术的出现突破了传统的单点测量方法,能有效提取点、线、面和体的基本映射数据,实现完整的“真实拷贝”,完成了坡体的快速数字化,高精度、全面、快速实时和非接触式获取边坡实体的三维信息,避免了烦琐的数据采集工作,已有很多学者对其在边坡变形领域的应用做了实践性研究[6~8]。因此,本文以某一边坡为例,设置实验方案利用三维激光扫描仪对其实施连续的数据采集。根据测距、测角及光斑误差确定点位误差椭球,进而推导出实际点云误差空间大小,然后确定激光点位误差真实限差,最后,利用激光点位误差真实限差求出变形可监测性指标。根据理论推导的变形可监测性指标计算公式计算实验边坡可监测性指标的大小,并用这种方法和基于KNNS的边坡变形信息提取算法来分析三维激光扫描探测到的边坡微小变形,实现边坡变形的完整监测。
2 研究区域和实验方案
为了研究三维激光扫描技术对边坡变形监测的有效性,选择某边坡作为研究对象,利用Riegl VZ-400地面三维激光扫描仪对其边坡进行扫描。为了后续边坡变形监测,在远离边坡变形的稳定区域布置了4个球型标靶作为控制点,如图1所示。标靶位置固定,并在布设控制点的地方做标记以利于实现边坡的重复监测。
2016年10月10日,首次对滑坡进行数据采集,当天天气晴朗、视野良好,现场无植被遮挡现象。在测站1架设仪器获取第一期边坡的点云数据。第一期点云数据采集完成后,仪器及控制点保持不动,立即对边坡进行重复扫描,获得第二期边坡点云数据。2016年10月14日,三维激光扫描仪架设在测站2,在前期已经做了标记的位置上重新架设控制点,4个球型标靶架设位置与第一期相同,通过扫描获得第三期边坡点云数据。经过将近两个月后,2016年12月1日,以同样的方法,获取第四期边坡点云数据。2016年12月3日获取第五期边坡点云数据。
3 边坡变形可监测性指标的确定
3.1 可监测性指标的计算方法
利用三维激光扫描进行边坡变形监测,首要的工作是确定边坡变形可监测性指标(Deformation Monitorable Indicators,DMI)。其基本思想是通过测距、测角及光斑误差确定的点云误差公式和方差-协方差矩阵推算不考虑重叠区域的单个误差椭球体积,进而推出考虑重叠区域的单个误差椭球体积计算公式,最后由已知的点云误差椭球体积计算激光点位在X、Y、Z轴上的标准偏差,从而根据激光点位误差真实限差确定变形可监测性指标的大小。具体推导过程如下:
从三维激光扫描仪工作原理可知影响点位精度的主要因素有测距、测角和光斑误差,由误差传播规律,可得激光测距和角度测量的方差-协方差矩阵为:
(1)
(2)


(3)

光斑误差影响的方差-协方差矩阵为:
(4)

ax、ay、az,bx、by、bz为激光光斑长轴和短轴在水平和垂直方向的分量[11]。
假设激光点位服从正态分布,则根据测距、测角误差和光斑影响可确定点云误差分布公式:
(5)
式中SX为点误差矩阵,SX=DX+DX-facula。
根据矩阵正交理论,可以转化为标准误差椭球形式[12],式(5)可写为:
式中:比例因子p是由给定的概率决定;e1,e2和e3是点误差矩阵SX的特征值。
在进行数据采集过程中由于扫描间隔的设置,相邻的误差椭球可能存在交集,导致实际点误差椭球变化,因此需要计算相邻点位误差椭球之间重叠区域误差空间体积。假设椭球在Z方向上存在交集,若扫描的点云具有k行和j列,则在Z轴方向上存在的椭圆体相交区域的数量是k(j-1),则可以获得误差椭球体重叠的总量:
(7)
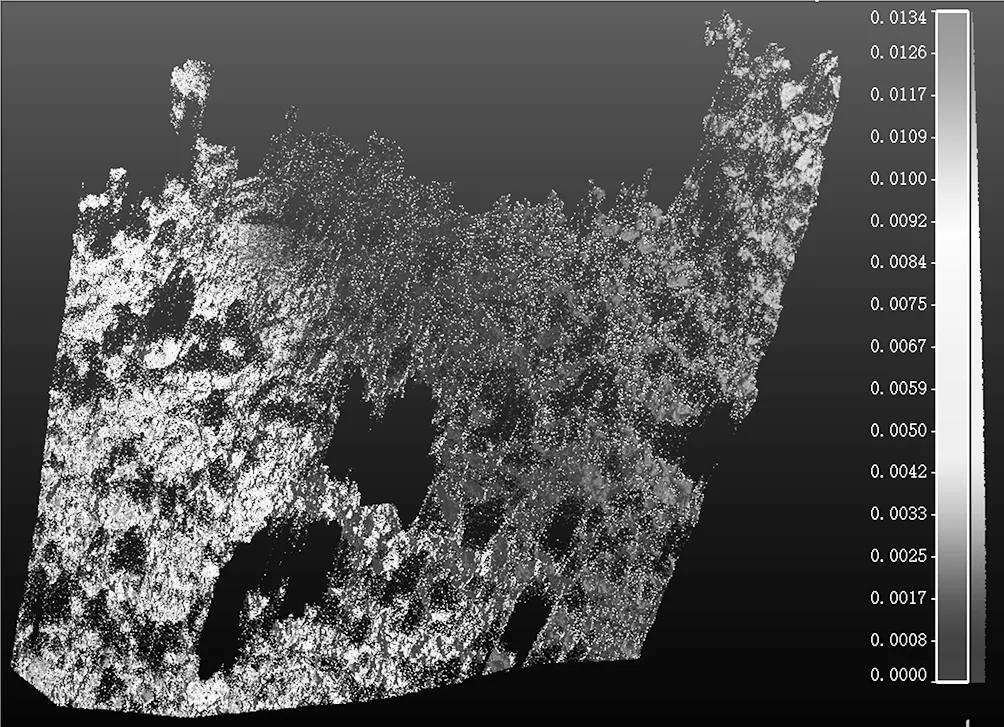
式中a,b,c是椭圆半轴长,且根据三维椭球的标准形式a=pe1,b=pe2,c=pe3,比例因子p越大,扫描点误差落在误差椭圆内的可能性越大;根据参考文献[12],当p=2时相应的误差椭球产生的概率是73.85%,此时误差椭球基本包含大部分误差信息,如果该值太大,则局部位移可能会被掩盖,即p取2。d为扫描间隔,0 在没有重叠的情况下误差椭球总体积为: (8) 则实际点云误差椭球体积为: Vactual=Vall-Vtotall (9) 设相邻误差椭球没有交集情况下单个误差椭球体积为v,即为点位误差椭球,代表每个点位的平均误差,根据点云总点数可得点位误差椭球体积为: (10) 在考虑相交时,实际点位误差椭球体积为: (11) (12) (13) 联合式(10)、式(13)可得: (14) (15) 最后确定点位误差真实限差为: (15) 根据误差极限的性质,可以得到变形可检测性的大小为: (16) 其中p取2。 三维激光扫描仪采集的原始数据包括与测量目标无关的背景物体、浮尘、植被、噪声点等点云数据,这些数据会影响后续的形变提取工作。因此,首先进行点云数据预处理,删除无关点云和噪声点。然后,提取第一期扫描点云以及第二期扫描点云标靶球中心点坐标,利用四参数-ICP配准算法将第二期点云数据转换到第一期点云数据坐标系下,从而进行数据分析。考虑到第一、二期扫描,扫描仪未动,而且时间较短,可认为两次扫描边坡无变形,有差异主要由测量误差引起。如图2所示,给出了两期对比变化结果图。 图2 第二期与第一期数据对比结果图(俯视) 由图2可知:两期的变化量从0到 0.013 4 m不等,最大变化值 0.013 4 m小于 0.014 1 m但很接近,所以本次重复扫描产生的变化为误差引起,并非边坡发生的变形,从而验证了变形可监测指标确定方法的可行性和正确性。 A.Abell′an利用K最近邻搜索算法(K-Nearest Neighbor Search,KNNS)进行离散点云的变形提取,计算两期点云数据的差值,指出当K值取24(5×5NN)的时候,计算精度最高[13]。本文利用基于KNNS的边坡变形信息提取算法,进行三、四、五期边坡变形提取。 对第三期数据进行去噪及配准等处理,与第一期数据进行比较,其结果如图3所示。 图3 第三期与第一期对比结果图(俯视) 由图3可以看出:两期差异数值变化范围为 0 m~0.014 0 m,监测到的最大变化值小于 0.014 1 m,说明边坡没有发生变形。 以同样的方式,对第四期数据进行去噪和配准等处理,与第一期数据进行比较,其结果如图4所示。 图4 第四期与第一期对比结果图(俯视) 从图4中可以看出:两期对比数值变化比较大,从 0 m~0.247 0 m,且 0.247 0 m远大于 0.014 1 m,边坡发生变形,最大变形值为 0.247 0 m。 第四期与第一期边坡点位的形变情况 表1 由表1可以看出:点A01、A02、A11均位于图4中颜色单一的蓝色区域内,变化量很小,均未超过 1.41 m,在误差范围内,认为这三点没有发生变形;点A03、A08、A09这三点所在位置均为浅青色及青色部分,变化量已超过误差范围,但变形不是很大,考虑误差的影响,变形范围为 0.030 8 m~0.044 9 m、0.061 3 m~0.075 4 m、0.069 5 m~0.083 6 m;点A05和A10在图中的位置为橙黄色区域,变形大小约为0.170 8 m~0.184 9 m、0.110 5 m~0.124 6 m,这些点所在的位置发生了较大的变形;点A04、A06和A07变化量最大,这些点附近极易发生形变。结果说明经过两个月的时间后,边坡遭受雨水冲刷及边坡的土壤组成或外界破坏等原因导致了不同区域发生了不同程度的变形,考虑到误差的影响,最大变形范围为 0.232 9 m~0.247 0 m,最大变形量在坡顶等危险区域极可能发生。同时,本文利用颜色差异可以反映边坡的变形情况,蓝色区域可以认为是无变形;浅青色及青色说明存在变形但为小变形;橙黄色及黄色至红色部分为边坡的危险区域,颜色变化越明显,变形越大,结合表1中的数值标记可对边坡进行有效的灾害预警。图4中用圆圈标记出来的颜色变化最明显的区域即为第四期边坡发生变形的四个主要位置。 以同样的方式,对第五期数据进行处理,与第一期数据进行比较,其结果如图5所示。 从图5的颜色变化可以明显发现主要变形区域,如图5中4个红色圆圈所示,且对比图4与图5可看出主要变形位置没有改变,尽管第五期与第四期时间上只差3天,但变形区域明显扩大,而且数值结果增大了,说明边坡一直在发生变形。 图5 第五期与第一期对比结果图(俯视) 本文通过理论公式计算变形可检测性指标大小,采用重复扫描的方式对其可靠性进行实地验证,同时对采集的多期数据利用K最近邻搜索算法(KNNS)进行点云的变形提取,实现高精度的边坡点位变形和区域变形信息提取,为边坡的监测预警提供了有效的技术支撑。实验表明:本文提出的三维激光扫描进行边坡监测方法是可行的。









3.2 可监测性指标的实验验证

4 边坡变形信息提取和结果分析
4.1 第三期边坡变形结果分析

4.2 第四期边坡变形结果分析



4.3 第五期边坡变形结果分析

5 结 论
