一种基于模糊自适应的速度反馈主动抑振方法
2018-08-30刘惟肖贾振元姜雨丰鲁继文张家昆
刘惟肖,贾振元,刘 昱,刘 巍,姜雨丰,鲁继文,张家昆
(大连理工大学 机械工程学院,辽宁 大连 116023)
风洞模型试验是航空飞行器设计、制造与定型的重要环节,准确稳定的风洞模型试验数据可为航空飞行器空气动力学特性研究提供重要的试验基础[1]。为了准确获取处于设计阶段的飞行器的气动特性,往往需要利用缩比的飞行器模型在风洞中进行气动载荷的测量试验。而随着新一代飞行器性能需求的提升,需要飞行器具有大攻角的飞行机动能力,这对风洞试验技术提出了较高的要求[2]。飞行器模型通常采用对流场影响最小的连接在模型尾部的悬臂梁类细长支杆来实现固定。这种结构是一个典型的质量集中分布在自由端的悬臂梁类结构,通常具有较低的动态刚度,因此在风洞内的亚声速或者跨声速气流的激励下容易在俯仰方向的一阶模态频率下出现大幅振动[3]。振动不仅会影响测力天平正常工作,甚至会对试验安全产生威胁。增加被动吸振器是一种选择[4-5],但被动吸振器的应用效果还受限于由于其无法跟踪因为试验环境(马赫数、攻角)的改变而引起的结构模态频率的变化。
为了解决空间外形限制和振动抑制效果之间的矛盾,研究人员在振动的主动控制方法上做了大量的工作。ViGYAN Inc的S. Balakrishna等与NASA Langley Research Center的W. A. Kilgore、M. J. Acheson等设计了2种分别位于支杆前部和尾部的主动减振器,并在National Transonic Facility通过NASA的Common Research Model,验证了减振器的效果[6-8]。南京航空航天大学的邵敏强等设计了一种安装于模型内部空腔的电磁作动器减振结构,并通过设计补偿器补偿由于滤波器引起的信号延时,提高了速度反馈控制在振动抑制工程应用上的效果[9]。沈星等设计了一种支杆尾部截断式压电作动器主动减振结构,采用了PD控制器,并在低速风洞下验证了振动控制的效果[10]。该系统与方法对低速、定攻角飞行器模型的振动有较好的抑振作用。
为了使控制方法能够根据振动状态进行自适应的调节,本文将模糊逻辑速度反馈控制应用于振动主动控制领域。首先提出了结构振动状态的评价指标,然后设计了一种模糊自适应变增益速度反馈控制方法。为了验证控制器的效果,将其应用在了一种基于内嵌式压电陶瓷作动器的尾部支撑式模型振动主动抑制结构中,结合试验与传统的定增益速度反馈控制器在同样工况下的试验效果进行了对比。
1 振动主动控制系统
1.1 控制系统结构与原理
针对上述振动抑制需求,提出了一套基于压电陶瓷作动器的主动振动抑制系统方案。该系统的工作原理是采用加速度传感器测量模型振动状况,通过控制器决策得到压电陶瓷作动器控制信号,经电压放大器放大驱动压电陶瓷输出控制力,形成闭环系统,实现振动的快速、稳定控制。尾撑式风洞模型支杆系统振动主动控制系统的原理图如图1所示。
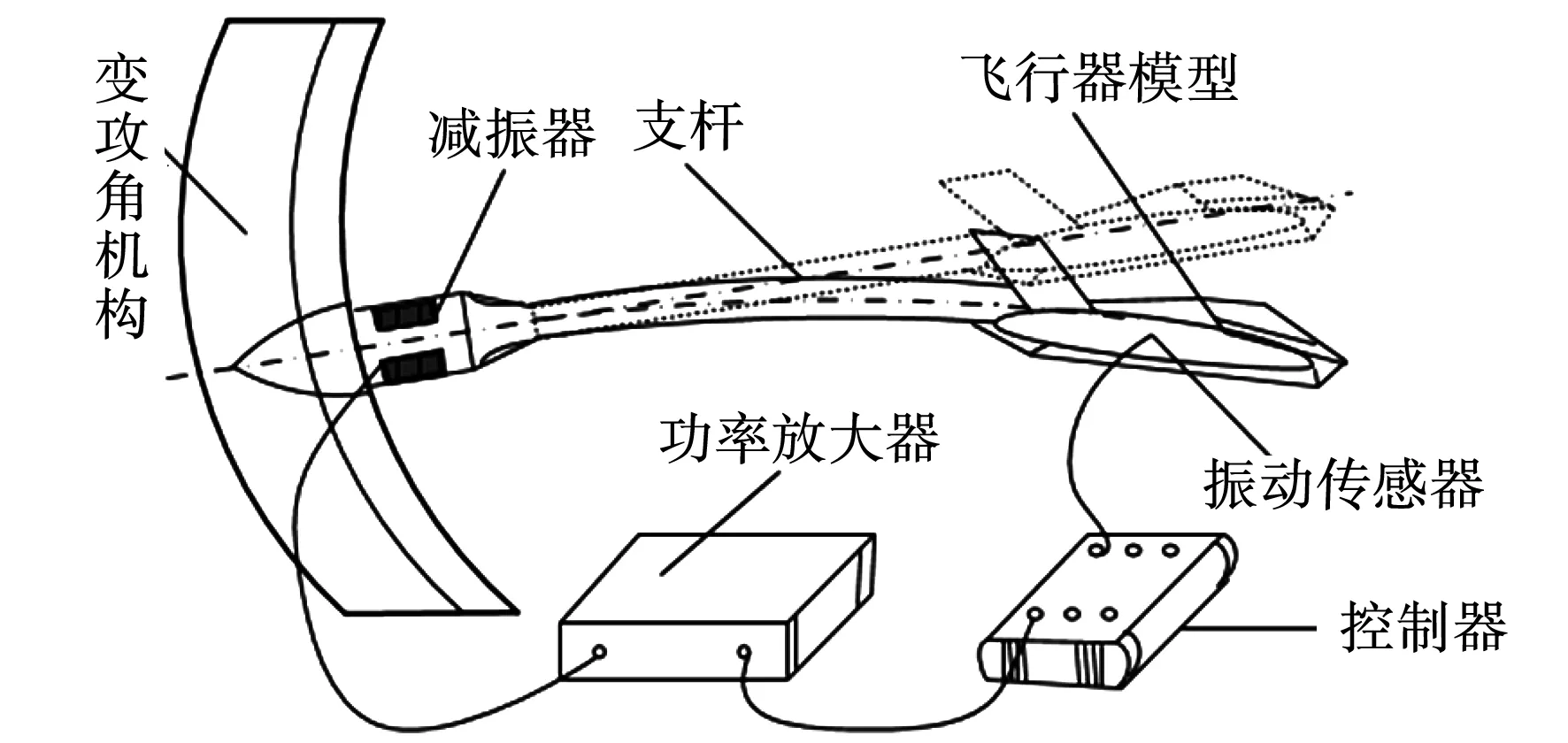
图1 飞行器模型振动主动控制系统原理图
1.2 悬臂梁内嵌式减振器结构
为了实现风洞试验过程中飞行器模型气动参数的高精度测量,通常将模型固定在尾撑支杆上,以减小对飞行器模型附近流场的影响。为了测量气流作用在飞行器模型上产生的气动载荷,需要在支杆与模型之间安装多自由度测力天平。细长支杆与天平组成的支撑系统具有低刚度特性,与模型形成了一个质量-弹簧系统,在动态气流的激励下容易产生振动。为了减少支杆的气动外形对力测量的影响,本文采用了一种内嵌于支杆尾部的减振器结构形式,具体结构如图2所示。
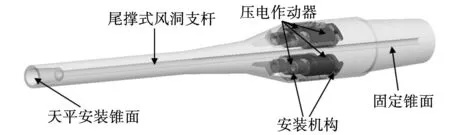
图2 基于压电陶瓷作动器的内嵌式主动减振器结构
2 减振器控制算法设计
2.1 控制算法整体方案
在飞行器的变攻角测力试验过程中,飞行器模型在不同攻角下所受到的静态载荷与动态载荷变化较大,并且在跨声速试验范围内气动载荷激励具有较强的随机性。传统的速度反馈控制器需要针对不同的试验状态分别整定适合的参数,难适用于亚、跨声速风洞变攻角试验,因此需要设计主动振动抑制控制方法对跨声速、变攻角试验时产生的风洞环境变化具有一定自适应能力。在风洞试验中,模型的加速度信号瞬时随机性较强,在大范围内变化剧烈,虽然能够作为良好的反馈信号,但不适合直接作为表征一段时间内系统状态的参考量;而振动均方根值在一段时间内变化较为平稳,可以为控制器的自适应设计提供较好的参考。因此,本文针对风洞变攻角试验的系统与激励特点,提出了一种参考系统一段时间内的振动均方根与均方根变化率,并通过模糊控制实时对速度反馈控制器的增益进行修正与调节的控制方法。总体的控制方案如图3所示。
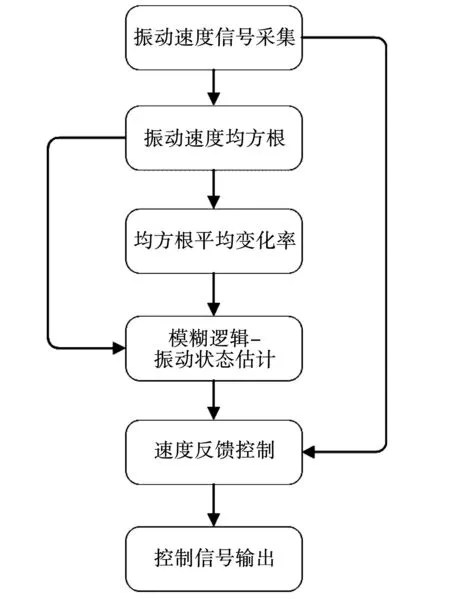
图3 控制算法整体方案
2.2 振动强度评价
本文提出采用如下2种状态参考量评价飞行器支杆系统的振动特性:1)振动速度在一段时间内的均方根值;2)一段时间内的振动速度均方根值的平均变化率。振动参考量实时解算原理图如图4所示。

图4 振动参考量实时解算原理图
通过实时采集到的振动速度-时间信号对系统在一段时间内的振动速度的均方根值进行计算,计算结果作为模糊控制器的输入参考值。为了实现这一算子,需要定义计算时间的长度,定义为均方根算子的时间常数T1,然后对在时刻(t-T1,t)内的振动速度信号进行积分,再求取该时间段长度并开方。振动速度均方根参考值e1(t) 可由式1进行实时求解。
(1)
式中,t是进行实施运算的时刻;v(t)是t时刻振动速度值。
振动强度评价的第2个参考值是振动速度均方根的平均变化率e2(t) 。为求取平均变化率本文引入了变化率算子的时间常数T2,然后通过式2对系统振动速度均方根值在(t-T2,t)时间段内的平均变化率进行实时解算。
(2)
式中,e1(t)和e1(t-T2)分别是t和t-T2时刻实时解算出的振动速度均方根参考量。
2.3 模糊指导式速度反馈控制器设计
通过上述2种指标对系统的振动状态进行实时分析。系统的2种振动状态指标(振动均方根值与均方根平均变化率)分别从振动强度状态与振动变化趋势预测2个角度对系统与风洞激励环境的变化进行评估。进一步利用上述方法获得系统振动状态,设计了一种通过模糊逻辑进行增益调节的速度反馈控制器,其结构如图5所示。该控制器引入了双输入单输出(DISO)模糊逻辑。调整后的速度控制器通过反馈加速度信号进行决策,输出控制信号驱动压电作动器,对系统的振动进行主动控制。
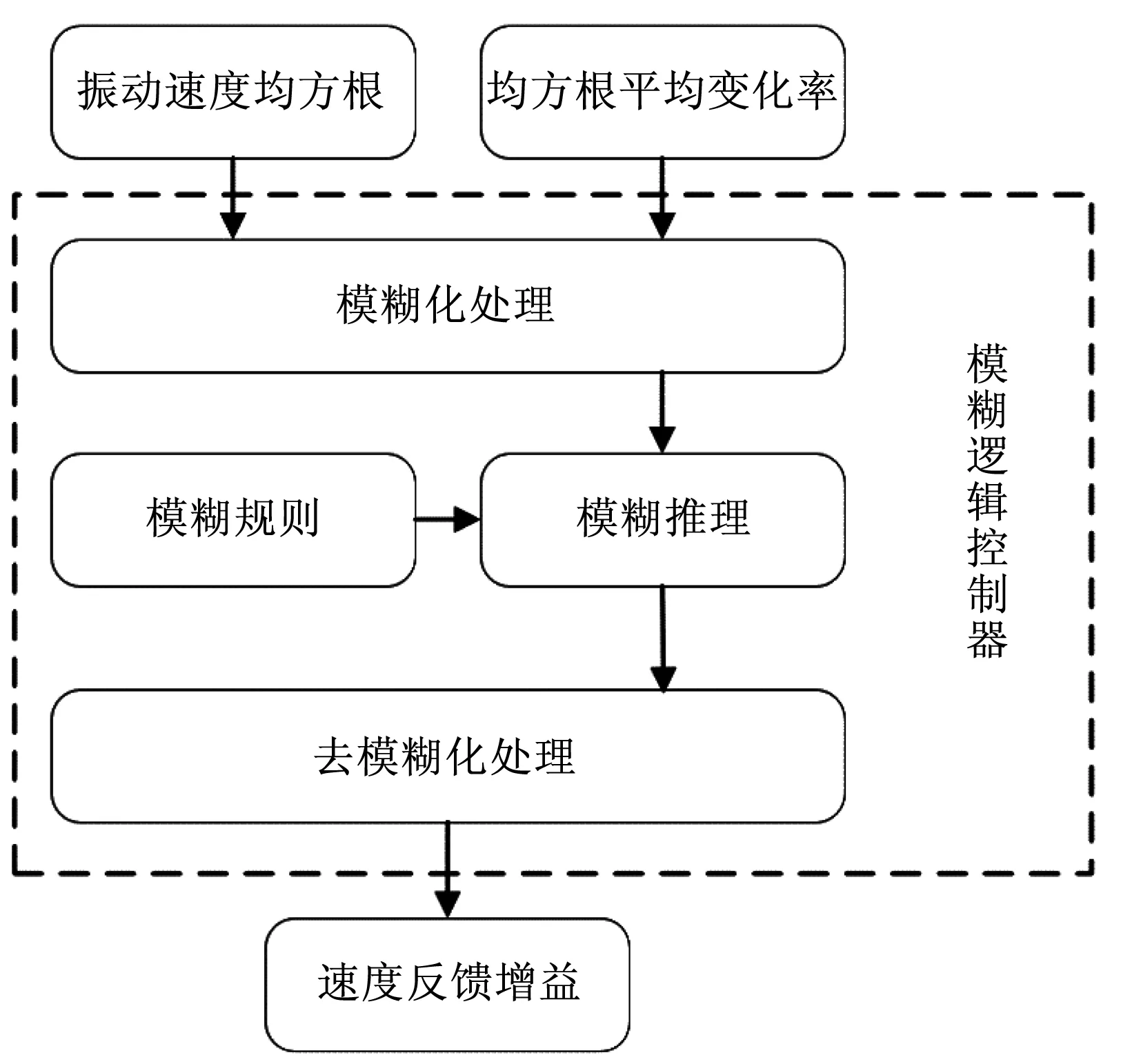
图5 模糊逻辑控制器结构图
模糊控制器输入的语言变量为系统的振动速度均方根参考量e1(t)与均方根平均变化率参考量e2(t),输出语言变量为速度反馈增益。根据实际试验振动状况,确定振动速度均方根的论域为E1:e1∈[0,3];均方根平均变化率的论域为E2:e2∈[-1,4];输出速度反馈增益的论域为K:k∈[50,200]。在模糊控制器的输入输出论域上均定义5个模糊集合,采用模糊集合线性分布的三角形隶属函数。
根据试验经验设计对应全部可能的模糊关系的模糊规则(见表1)。通过构建的这种模糊规则能够实现输入与输出之间的非线性映射。

表1 模糊规则表
确定输入量所激活的模糊规则并求取其前提部分的激活度。利用最小T范数算子分别对被激活的模糊规则前提部分模糊关系所对应的激活度进行求解。模糊关系及其激活度如下式所示:

(3)

(4)
由于输入精确值为已知量,那么输出模糊集合的激活度为未知的精确输出值k的函数。其中,μK(k)为精确输出值的隶属度。

(5)
式中,x为被激活的模糊规则中的一条;r为被激活的模糊规则的数目。
将振动速度信号作为反馈信号,经过自适应调整后的速度反馈控制器,得出输出到减振器的控制信号。控制器的决策得到的输出控制电压为:
(6)
3 地面验证试验
3.1 试验设备与系统
本文采用应用于风洞模型的内嵌式主动振动抑制系统对提出的模糊指导式速度反馈控制器进行了试验。主动控制系统地面试验平台如图6所示。在地面试验中,使用单轴的加速度传感器对振动加速度进行测量,并在积分后进行滤波处理,以实时获取速度反馈信号。为了验证控制方法的稳定性与效能,分别对系统进行了锤击试验与激振试验。
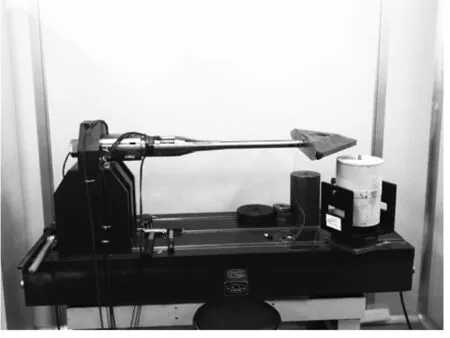
图6 风洞模型振动主动控制系统地面试验平台
3.2 锤击试验
首先利用风洞模型振动主动控制支杆对系统进行锤击试验,分别对比了在控制器关闭、定增益速度反馈控制(小增益k=100和大增益k=120),以及模糊指导自适应速度反馈控制(增益变化范围为50~200)下,系统对锤击激励的响应。使用锤击法获得的模型-支杆系统在俯仰方向上的响应分别如图7~图9所示。

图7 无控制下系统锤击响应
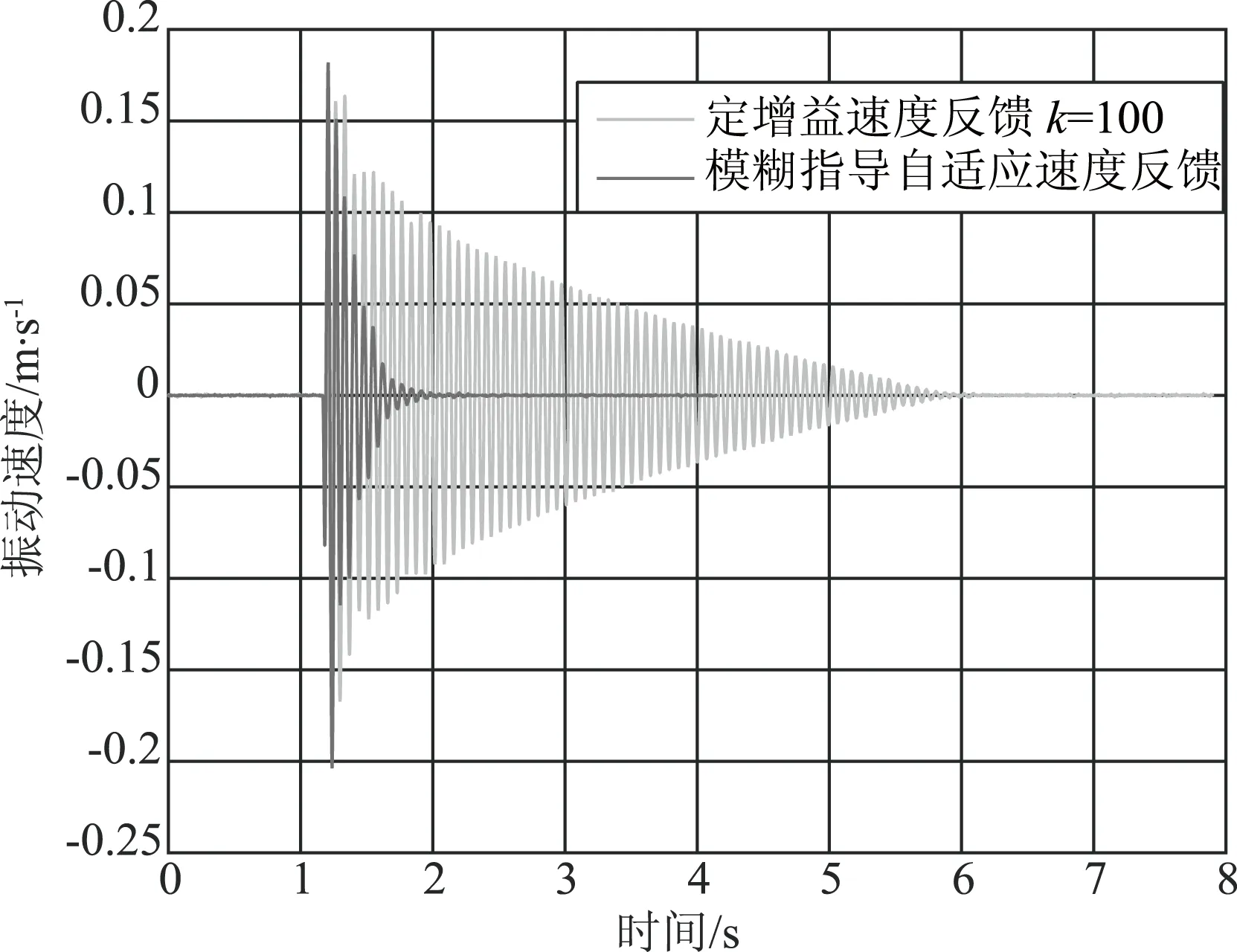
图8 k=100定增益与模糊指导自适应速度反馈控制下锤击响应对比

图9 k=120定增益速度反馈控制自激振动现象
由图7~图9可知,在无主动控制的情况下振动衰减十分缓慢,在锤击9.5 s后仍有速度振幅>0.25 m/s的振动。而在同样的试验条件下,小定增益速度反馈系统在锤击结束4.6 s后稳定,大定增益速度反馈系统产生了自激振动,速度振幅为0.35 m/s。而本文提出的模糊自适应速度反馈控制方法同时使得控制器具有大增益收敛速度快和小增益稳定性强的优点,系统的振动在锤击结束后0.8 s内稳定。
3.3 激振试验
在同样的控制参数下对系统进行了正弦信号加载激振试验。激振频率为系统在俯仰方向上的一阶固有频率14.04 Hz,得到系统在2种控制方法下的响应曲线如图10所示。在定增益控制中,剩余振幅比为36.3%,稳定时间为1 s;而在本文提出的模糊指导自适应速度反馈控制下,剩余振幅比为18.2%,稳定时间为0.8 s。

图10 激振试验系统响应
试验结果表明,本文所提出的模糊指导自适应速度反馈控制相较于传统的定增益速度反馈控制具有更好的环境适应性,在提高了系统抑振器工作效率的同时,保证了控制的稳定性;因此,该控制算法及主动减振设备在风洞环境下运行具有较高的可行性。
4 结语
本文设计了基于压电作动器的风洞模型支杆振动主动抑制系统,并提出模糊逻辑的速度反馈控制方法,能够根据振动强度与振动变化的趋势对反馈增益进行实时调节,从而实现了对风洞支杆俯仰方向低频大幅振动的抑制。使用锤击法和激振法对抑振器进行了地面试验研究,该方法避免了由于速度反馈引起的系统出现正阻尼所产生的自激振动现象,在保留了高增益速度反馈响应迅速这一优点的同时,提高了控制与系统的稳定性。在激振试验中,本文提出的新控制方法使得系统振动速度幅值降为原来的18.2%,是传统定增益速度反馈控制剩余振幅的50%。该试验与方法对于未来的进一步风洞试验研究具有较高的参考意义,有助于提高系统在风洞复杂激励环境下的工作效率与稳定性。
