四轮独驱电动车横摆力矩与主动转向协调控制
2018-08-28雷永强马高峰
李 刚,雷永强,马高峰
1 引言
汽车横摆力矩控制能够使车辆在轮胎侧向力达到临界状态下稳定安全地行驶,而主动转向控制则能够保证车辆在轮胎处于线性区域内的操纵稳定性,但当轮胎侧向力处于临界状态时将失去控制作用。横摆力矩和主动转向二者在控制方面又存在耦合区。如何规避相互之间的干扰冲突,并发挥各自的主动控制优势,已成为汽车工程领域和科研人员研究的热点[1]。文献[2-4]应用预测控制理论进行了主动转向和横摆力矩集成控制算法研究。文献[5-7]应用滑模变结构控制理论进行了主动转向与横摆力矩集成控制算法的设计。文献[8-9]将最优控制理论应用到主动前轮转向与直接横摆力矩集成控制研究中。集成控制包括集中控制与协调控制两种[10],上述主动转向与横摆力矩集成控制属于集中控制。这些控制方法均提高了汽车操纵稳定性,但是预测控制需要更新优化,实时性相对较差;而滑模变结构控制容易出现执行器的较大波动;最优控制的不同工况下的加权矩阵难以确定,如果确定不好,也达不到“最优”。模糊控制由于鲁棒性好、控制实时性方面的优势[11],在实际控制系统中得到了广泛的应用。给出了整车横摆力矩与主动转向协调控制原理,应用模糊控制理论设计了横摆力矩模糊控制器、主动转向模糊控制器,根据仿真实验结果设计了协调控制器,并通过CarSim与Matlab/Simulink联合仿真实验对控制方法进行了验证。
2 协调控制原理
控制系统参考模型根据车辆实际车速和驾驶员方向盘转角计算出期望的横摆角速度和期望的质心侧偏角用于整车控制,其协调控制原理,如图1所示。参考模型采用单轨线性二自由度车辆模型[12],期望横摆角速度直接由参考模型输出,为了提高车辆抗侧滑能力期望质心侧偏角定义为零度。横摆力矩控制器、主动转向控制器根据期望值和车辆实际响应值的偏差计算出相应的横摆力矩和主动方向盘转角。
协调控制器根据实际车速和方向盘转角计算出横摆力矩控制器权重系数和主动转向控制器权重系数,并与横摆力矩控制器输出的附加横摆力矩和主动转向控制器输出的主动方向盘转角相乘得到附加横摆力矩和附加方向盘转角。驱动力分配器根据驾驶员目标驱动力矩与附加横摆力矩,采用规则分配方法对四轮驱动力矩进行分配,而附加方向盘转角直接由控制器内部叠加作用到方向盘上。为了提高整车协调控制的鲁棒性,使汽车能够适应各种工况,基于模糊控制理论来设计横摆力矩控制器和主动转向控制器。

图1 协调控制原理Fig.1 Coordinated Control Principle
3 控制器设计
3.1 横摆力矩控制器设计
基于Mamdani模糊推理设计横摆力矩模糊控制器,采用重心法对模糊控制器输出量进行反模糊化计算。模糊控制器输入量为期望与实际横摆角速度偏差、期望与实际的质心侧偏角偏差,论域为[-1,1]。模糊语言设计为{正大、正中、正小、零、负小、负中、负大},对应符号表达为{PBI、PMI、PSM、ZER、NSM、NMI、NBI}。横摆力矩控制器的模糊语言设计为{正大、正中、正小、零、负小、负中、负大},对应符号表达为{PBI、PMI、PSM、ZER、NSM、NMI、NBI}。输入量、输出量的隶属度函数,如图2所示。

图2 输入量三角隶属度函数和输出量三角隶属度函数Fig.2 Input and Ouput Membership Functions
质心侧偏角、横摆角速度对车辆稳定性有着重要影响,横摆力矩模糊控制器的控制规则通过大量仿真实验进行不断调整,最终规则表,如表1所示。

表1 模糊控制器规则表Tab.1 Fuzzy Control Rules
3.2 主动转向控制器设计
基于Mamdani模糊推理设计主动转向模糊控制器,采用重心法对模糊控制器输出量进行反模糊化计算从而求得模糊控制器输出变量。模糊控制器输入变量为期望与实际的质心侧偏角之差、期望与实际横摆角速度之差,论域为[-1,1]。主动转向控制器的输出为方向盘转角,相应的模糊语言为{正最大、正大、正中、正小、零、负小、负中、负大、负最大},对应符号表达为{PVB、PBI、PMI、PSM、ZER、NSM、NMI、NBI、NVB}。输入量、输出量的隶属度函数,如图3所示。

图3 输入量三角隶属度函数和输出量三角隶属度函数Fig.3 Input and Ouput Membership Functions
质心侧偏角、横摆角速度对车辆稳定性有着重要影响,主动转向模糊控制器的控制规则通过大量仿真实验进行不断调整,最终规则表,如表2所示。
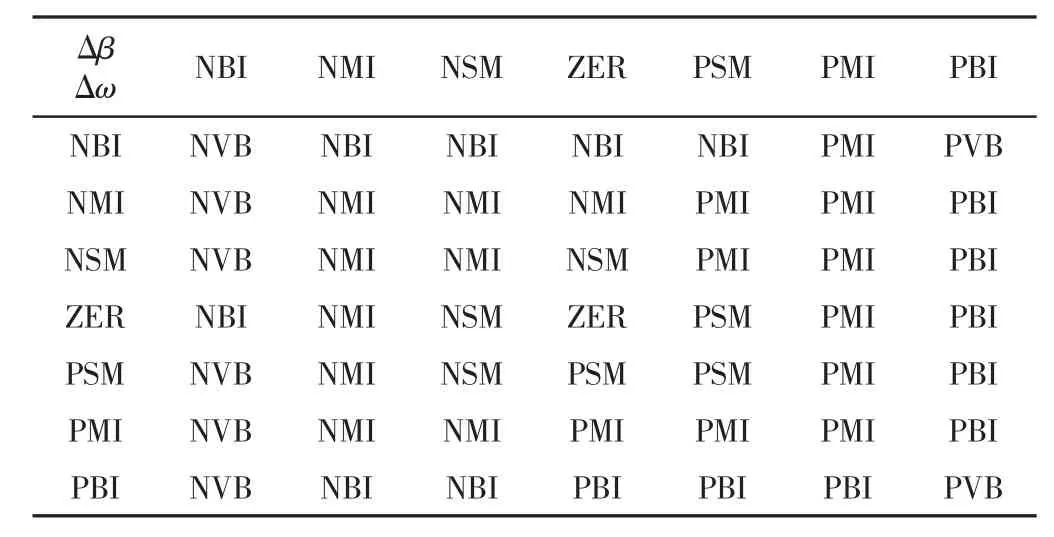
表2 模糊控制器规则表Tab.2 Fuzzy Control Rules
3.3 驱动力分配器设计
驱动力分配器根据横摆力矩、方向盘转角符号和大小对四轮驱动力进行分配,其规则,如表3所示。规定附加横摆力矩(ΔM)向左为正,方向盘转角(δ)向左为正。
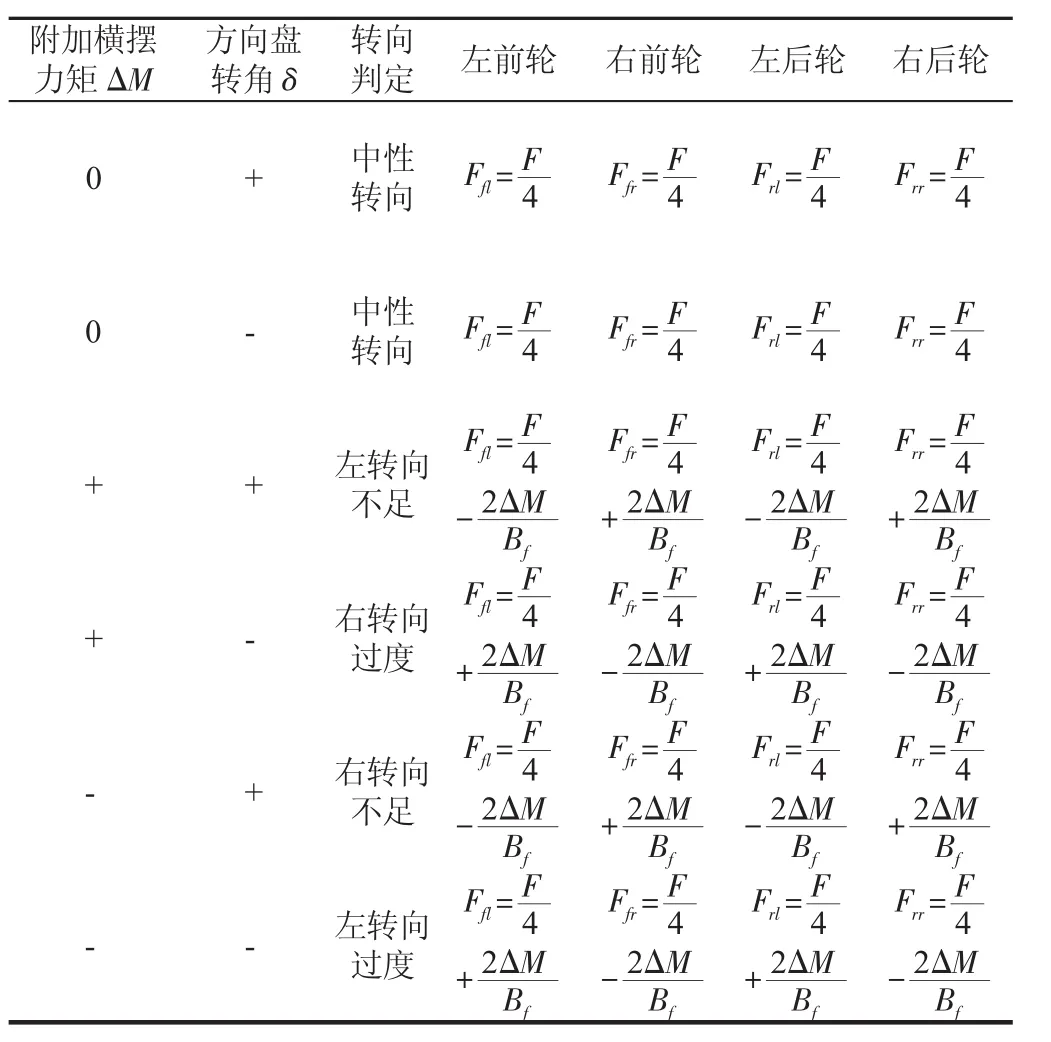
表3 驱动力分配规则表Tab.3 Driving Force Distribution Rule Table
3.4 协调控制器
协调控制器给出不同方向盘转角输入、不同车速下的横摆力矩控制器权重系数和主动转向控制器权重系数,通过大量仿真实验得到三维脉谱图,权重系数分配图,如图4所示。由汽车当前车速和方向盘转角,能够实时计算得到对应的权重系数。协调控制主要面向汽车稳定性控制,在低速下汽车不易出现失稳,因此权重系数的车速设定在(40~100)km/h范围内,方向盘转角设定在(0~150)°范围内。由权重系数三维脉谱图可知:较高车速和较大方向盘转角情况下,横摆力矩控制器权重系数要明显大于主动转向控制器权重系数,说明高速、大转角下车辆侧向力易达到饱和状态,横摆力矩控制在此种情况下更为有效;在中低速车速和较小转角工况下,主动转向控制器权重系数相对较大,说明此时轮胎工作在线性区域内,主动转向的控制效果较为明显。协调控制器根据实时方向盘转角和车速,给出使汽车稳定性最优的横摆力矩控制器权重系数和主动转向控制器权重系数。

图4 横摆力矩控制器和主动转向控制器权重系数分配图Fig.4 Yaw Moment Controller and Active Steering Controller Weight Coefficient Distribution Graph
4 仿真实验验证
基于CarSim与Matlab/Simulink联合仿真实验对控制方法进行验证。车辆模型选择CarSim中的B级车,整车质量1110kg,质心距前后轴距离分别为1.04m和1.56m,质心高度0.54m,前后车轮半径均为0.33m,前后轮距分别为1.481m和1.479m。应用Matlab/Simulink编写控制程序。仿真实验工况:车速80km/h的紧急双移线试验工况,路面附着系数为0.8。无控制、单一横摆力矩控制、单一主动转向控制和协调控制下的车辆横摆角速度、质心侧偏角、附加方向盘转角和四轮驱动力矩仿真实验曲线,如图5所示。

图5 实验数据曲线Fig.5 Experimental Data Curves
由图5(a)横摆角速度对比曲线可知:无控制情况下,车辆出现了较大横摆角速度,相对于期望横摆角速度值偏离最大,车辆容易出现失稳状态,由于在紧急转向工况下,主动转向控制轮胎侧向力容易出现饱和,因此横摆力矩控制效果要优于主动转向控制,而协调控制能够对横摆力矩控制器权重系数和主动转向控制器权重系数进行合理分配,能够实现横摆力矩和主动转向的优化组合,相比之下控制效果最好,控制后得横摆角速度值跟踪期望值最好。由图5(b)质心侧偏角对比曲线可知:在无控制下质心侧偏角相比之下变化最大,因此车辆稳定性最差;由主动转向控制曲线和横摆力矩控制曲线知主动转向控制下质心侧偏角相比无控制变化较小,车辆稳定性较好;协调控制后质心侧偏角最小,相比于单一控制和无控制更好地提高了车辆行驶稳定性。由图5(c)可知:协调控制下的附加方向盘转角小于主动转向控制下的附加方向盘转角,协调控制相对于单一主动转向控制能够有效防止轮胎侧向力达到饱和,提高了车辆侧向行驶稳定性。图5(d)、(e)分别为协调控制下的四轮驱动力矩和单一横摆力矩下的四轮驱动力矩,协调控制下的四轮驱动力矩要小于横摆力矩控制下的四轮驱动力矩,能够有效防止纵向力达到饱和而出现失去转向能力的现象。
5 结论
(1)给出了整车横摆力矩和主动转向协调控制原理,基于模糊控制理论设计了横摆力矩控制器、主动转向控制器,根据不同车速和方向盘转角的仿真实验结果设计了协调控制器,采用规则驱动力分配方法对四轮驱动力进行合理分配,最终实现横摆力矩控制和主动转向控制的协调控制,提高了四轮独驱电动车行驶稳定性。(2)基于CarSim与Matlab/Simulink联合仿真实验,选择紧急双移线工况对协调控制方法进行仿真实验验证,实验表明协调控制相对于单一横摆力矩控制、主动转向控制能够更好地提高四轮独驱电动车操纵稳定性。