新型多臂式输电线巡检机器人机构参数设计
2018-08-28陶广宏房立金徐鑫霖
陶广宏,房立金,徐鑫霖
1 引言
输电线巡检机器人研究始于20世纪80年代,1988年日本东京电力公司最早研制出了具有初步越障能力的光纤复合架空地线巡检机器人[1]。后续很多国内外学者对输电线巡检机器人开展了研究并发表了大量研究成果,提出了多种形式的巡检机器人机构,基本可分为双臂结构、三臂结构和多臂结构三大类。双臂结构典型的有日本HiBot公司研制的Expliner[2],某水电研究院推出的名为LineScout[3]的巡检机器人样机,文献[4]设计的双臂回转式机器人,以及文献[5-6]分别提出的双臂巡检机器人等。三臂结构主要包括由山东科技大学[7],文献[8-9]研究机构分别设计的巡检机器人原型机。以上双臂和三臂式机器人结构简单,存在单手臂挂线越障过程,虽然已经部分在电力部门得到了实际应用,但大多是在直线线路档内使用。多单元巡检机器人结构最早是由文献[10]于1989年提出的6臂式结构,该机器人由6个具有升降臂和行走轮的单元串联组成,单元间由转动关节连接,越障时各个手臂顺序越过障碍,但两手臂挂线状态下间距固定,越障能力受限。
输电线路需安装多种电力金具,各电力金具成为阻碍机器人正常行进的障碍,机器人必须具备跨越典型障碍的能力。双臂式机器人只需满足单个障碍位于其越障手臂工作空间内,障碍间距离大于其夹持机构尺寸,即可完成越障任务。多臂式巡检机器人同时还需要考虑多个障碍间的距离及障碍尺寸是否会导致后侧手臂与前侧手臂已跨越的障碍发生干涉的情况,即不同的障碍组合对多臂式巡检机器人机构提出更多的要求。多臂式多单元结构能很好解决机器人转向越障问题,同时不存在单手臂挂线越障情况,越障过程稳定。由于其结构相对复杂使多单元机构一直未得到充分重视,对于多臂式巡检机器人进行优化设计研究显得十分必要。提出一种新型的多臂式多单元串联的巡检机器人机构。基于500kV架空地线上典型的障碍环境及机器人越障方式,得出其对巡检机器人结构尺寸约束条件,综合考虑其整体尺寸,便携性能及防舞动性能因素,得出机构参数优化结果。最后进行工作空间分析,验证其越障可行性并给出针对典型障碍组合的越障流程。
2 输电线路障碍环境分析
机器人针对500kV架空地线的障碍环境设计。地线型号为JBL4-150铝包钢绞线。线路上典型的障碍及其尺寸,如表1所示。

表1 典型障碍(单位/mm)Tab.1 Typical Obstacles

图1 典型障碍组合Fig.1 Typical Obstacle Combination
输电线路上的障碍具有多种组合方式,其中接续管对蠕动式越障机器人影响可以忽略。根据输电线路的具体安装规程,可将障碍分别归纳为的组合,如图1(a)、图1(b)所示。图中尺寸单位为mm。在实际线路环境中,悬垂金具两侧线路可能存在一定俯仰角度,耐张塔两侧线路可能同时存在俯仰角度和水平转角。不同自然环境下输电线路风振强度不一,悬垂金具或耐张塔两侧的防振锤可安装1个或2个,即图1中防振锤1、5为可能存在的障碍。
3 机器人机构设计
机器人机构,如图2所示。以手臂间两个平行四边形机构为1个单元机构,则机器人由4个单元机构串联组成,手臂及前后平行四边形机构能够独立回转。平行四边形机构采用柔索对角驱动方式,通过改变对角线长度控制其俯仰运动。
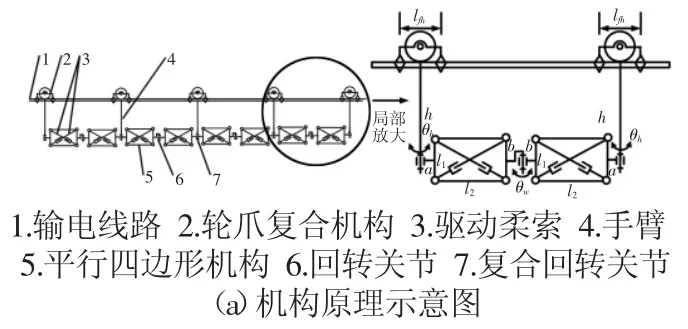

图2 机器人基本构型Fig.2 Robot Mechanism
图中:a—平行四边形机构与相邻手臂距离;b—平行四边形机构与无手臂水平回转中心距离;l2—平行四边形机构上下杆长度;l1—平行四边形机构左右杆长度;h—机器人手臂长度,即平行四边形机构竖直杆件中点至行走轮外径与手臂交点的距离;lfh—轮爪复合机构尺寸;θf—平行四边形机构俯仰角度;θw—无手臂水平回转关节角度;θh—含手臂水平回转关节角度。
4 机器人机构参数优化
根据机器人实际工作任务环境及机械结构设计需求,用α表示线路俯仰角度,给出优化设计变量及非优化已知参数,如表2所示。

表2 优化设计参数Tab.2 Optimization Parameters
4.1 机构参数约束
4.1.1 线路俯仰角度及跨越防振锤约束

图3 无障碍行进及跨越防振锤参数约束Fig.3 Parameter Constraint when Moving on the Line with no Obstacles and Crossing Damper
机器人无障碍档段行进时,应能够适应线路最大俯仰角度,即当线路俯仰角度最大时仍能保证机器人各手臂均挂线且手臂处于竖直状态,如图3(a)所示。由几何关系可得约束条件1,如式(1)所示。

当机器人遇到防振锤时,手臂由其上侧依次跨越。如图3(b)所示。要求抬升手臂后行走轮与输电线路的距离AB大于防振锤在输电线路上侧的高度AfBf。同时手臂抬升过程中应保证平行四边形机构与防振锤无干涉。即抬升单元机构的最高点与输电线路的距离MN大于防振锤的最低点与输电线路所成距离MfNf。可得约束条件2,如式(2)所示。

式中:ly—防止干涉的安全余量,取ly=50mm;根据500kV超高压输电线路地线电力金具尺寸[11],一般AfBf≤50mm,MfNf≤100mm。
4.1.2 跨越障碍组合约束
当遇到第一种典型组合障碍时,要求机器人既能够抬升手臂跨越防振锤,又能够伸出1个单元机构使手臂由输电线路下侧跨越柱面障碍。如图4(a)所示,手臂4下线时,需要手臂3蠕动前进,应保证手臂3向前蠕动时无障碍。可得约束条件3,如式(3)所示。

式中:Lsen—手臂伸出后两手臂间距离;Lsuo(α=0)—水平线路上单元机构收缩后手臂间距离;dij—障碍序列中第i个障碍与第j=i+1个障碍包络面间的距离。
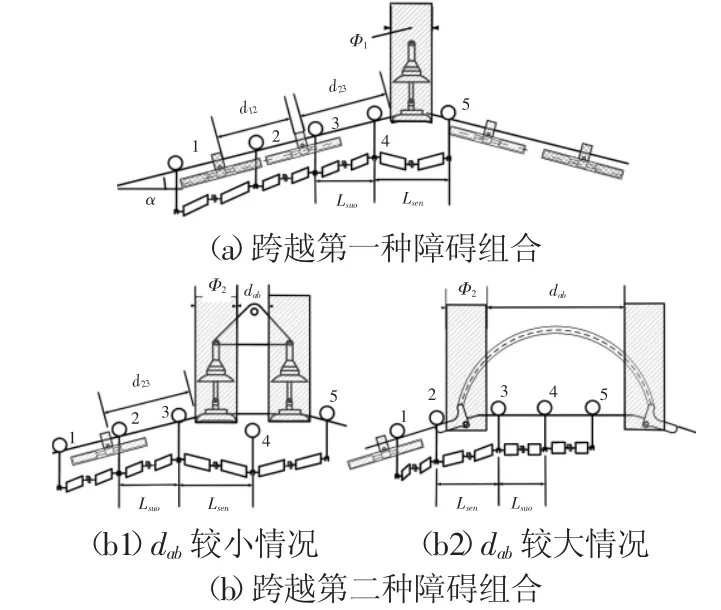
图4 跨越组合障碍Fig.4 Crossing Typical Obstacle Combination
跨越障碍组合2时可以分为两种情况:
(1)当第二种典型障碍组合柱面障碍距离较小时,如图4(b1)所示。机器人应满足两个单元机构伸出时最前侧手臂5能够运动到两柱面障碍另一侧。即单个单元机构能够抓持到dab的中点位置。同时当图中手臂3下线时手臂2应有足够的蠕动空间。应满足约束条件4,如式(4)所示。

由于障碍组合中悬垂金具的两个柱面障碍间距较小,转角塔障碍的两个柱面障碍间距较大,因此约束条件4按以下规则取值计算:当 dab<min Lsuo(α=0)+lfh时,Ф2取双悬垂金具的障碍圆柱面最大包络直径。当 min Lsuo(α=0)+lfh<dab<2min Lsuo(α=0)+lfh时,Ф2取耐张线夹的障碍圆柱面最大包络直径。
(2)当 dab尺寸较大时,如图 4(b2)所示。即 dab>2min Lsuo(α=0)+lfh时,需满足式(5)即可。

式5约束条件包含于式4,因此跨越第二种障碍组合时只需满足式(4)即可。同时由几何关系及非优化机构参数可得:

4.2 优化求解计算
4.2.1 优化目标
目标1:巡检机器人为工作在野外环境中超高压架空地线上的悬挂机构,为减小野外强风环境下的舞动幅度,应使竖直方向尺寸h+l1/2取极小值。同时输电线路在设计时地线与相线需保持一定距离,应使机器人竖直方向尺寸h+l1/2取极小值防止产生放电现象。目标函数为:min f(x)=h+l1/2
目标2:机器人在上线工作前应便于工作人员运输携带,水平方向尺寸a+b+l2应取极小值。目标函数为:min f(x)=a+b+l2
目标3:机器人为多手臂多单元设计,需要多电机驱动,应尽量减小机器人整体尺寸以减小机器人整体质量,整体尺寸a+b+l1+l2+h取极小值。目标函数为:min f(x)=a+b+l1+l2+h
4.2.2 优化求解
根据约束条件式(1)~式(4),代入非优化变量参数及表1中所示障碍尺寸,可得到优化约束条件数学表达式如下:

利用matlab中的多目标优化工具,采用fgoalattain函数,根据设计条件设定初始最优目标。

得出计算结果,如表3所示。

表3 优化结果Tab.3 Optimization Results
5 机器人机构参数分析验证
5.1 越障手臂工作空间分析
根据优化结果及非优化参数变量,利用蒙特卡洛方法,可得出机器人越障手臂末端的工作空间。防振锤障碍尺寸小,机器人尺寸明显能够满足防振锤越障要求。跨越单悬垂金具、双悬垂金具的越障执行机构工作空间,如图5(a)、图5(b)所示。跨越各障碍物包络面(最大尺寸)的目标夹持点均位于机器人越障执行机构的工作空间范围内。遇到转角塔障碍且杆塔横担尺寸较小时,要求单元机构伸出手臂能够抓持到杆塔横担中点处,输电线路与杆塔横担可能存在一定水平转角,如图5(c)所示,在dab=2(a+b+l2)的极限条件下,目标夹持点仍位于机器人越障手臂工作空间内。由图 5(a)、图 5(b)、图 5(c)可以看出机器人越障机构能够找到与障碍物不干涉的路径(这里为障碍物下侧)跨越障碍,具备跨越以上各障碍及与相似的位于该障碍包络面内其他障碍的能力。


图5 机器人工作空间Fig.5 Robot Workspace
5.2 典型障碍组合越障分析
以带有俯仰和水平转角的耐张塔障碍组合为例,越障流程,如图6所示。无障碍行进时手臂2、3、4挂线,遇到防振锤时,手臂2、3在线,手臂4伸出跨越防振锤,手臂1、5脱线调整机器人侧向平衡,如图6(a)所示。手臂4抓紧线路,手臂2、3依次蠕动至图 6(b)位置。手臂 4、3、2 依次向前蠕动至图 6(c)所示位置。手臂2、3、4抓紧线路,前侧手臂5抓紧杆塔横担中点处,如图6(d)所示。手臂4运动至障碍下侧,如图6(e)所示。手臂3、2依次蠕动至图6(f)所示位置。手臂2、3抓紧线路,手臂5运动至障碍另一侧并夹紧输电线路,手臂4运动至原手臂5位置,如图6(g)所示。手臂3、2依次脱线,重复手臂4的运动过程,手臂4下线重复手臂5运动过程,手臂5伴随向前蠕动,机器人可运动至图6(h)所示位置。手臂5、4、3依次向前蠕动,手臂1、2下线完成越障任务,如图 6(i)所示。
以上越障过程中侧向重力平衡手臂分别为:图6(a)~图6(g)中手臂 1,图 6(h)~图 6(i)中手臂 5。侧向重力平衡手臂在机器人能够满足侧向平衡条件时也可以落在输电线路上。
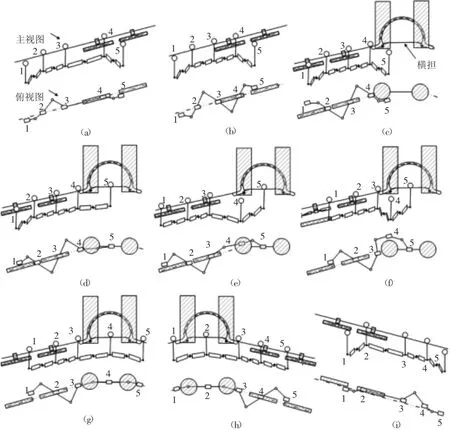
图6 机器人跨越典型障碍组合流程Fig.6 Process of Crossing Typical Obstacle Combination
由以上分析及越障流程可知机器人具备跨越500kV架空地线上典型障碍组合的能力。机器人在越障过程中至少有两手臂挂线,不存在单臂挂线及单臂行进过程,同时至少有1个手臂及单元机构可以作为机器人自平衡机构,满足机器人手臂脱线侧向偏出越障过程中的重力平衡需求,改善巡检机器人越障过程的稳定性能。机器人能够跨越带有水平转角的障碍。
6 结论
(1)提出一种新型五臂式输电线巡检机器人机构,在四边形机构中采用了柔索驱动方式。机器人具有多种挂线及越障模式,越障过程中可保证至少有两个手臂挂线,且能保证机器人侧向的重力平衡,可满足带有水平转角的越障需求。(2)与双臂机器人不同,三臂及多臂机器人在跨越组合障碍过程中存在一定的难度和复杂性。针对500kV架空地线障碍类型及障碍的组合情况,总结归纳出两种典型的障碍组合类型,并采用多目标优化算法得出了机器人机构参数的优化设计结果。