单PI过调制压缩机电机算法研究
2018-08-28肖钊宋万杰任新杰
肖钊 宋万杰 任新杰
广东美芝制冷设备有限公司 广东顺德 528333
1 引言
矢量控制算法驱动压缩机的基本算法原理[1]是通过无位置速度估算求出转子位置与运行速度,根据目标速度与期望速度通过PI调节,得到期望的D、Q轴电流;采集压缩机相电流,通过Clarke+Park变换得到反馈回来的D、Q轴电流,根据目标D、Q轴电流与反馈回来的D、Q轴电流进行PI调节,得到D,Q轴电压,最终输出6路PWM信号,控制压缩机[2]。
其中有两路电流环PI结构,常规的Idref(期望的D轴电流)设置为0,在进入弱磁后,通过控制电压矢量输出,给定相应的Idref,变相达到弱磁提速的目的。在如今电机设计反电动式这么高的情况下,过深的弱磁必定会引起压缩机效率的大大损失,而且弱磁后频率运行也不是很稳定,压缩机容易跳机。因此本文进一步分析压缩机在弱磁后不稳定的情况,通过过调制达到极限后,再进入弱磁,弱磁方法由传统的控制电压矢量输出变成单PI方式,进一步加强弱磁后的频率稳定性。
2 控制分析
2.1 矢量控制分析
永磁同步电机D、Q轴的方程为:

其中,Te为永磁同步电机的电磁转矩,Pn为永磁同步电机的极对数,φf为永磁体磁链,Iq为Q轴电流,Id为D轴电流,Lq,Ld为D,Q轴电感。R为相电阻,p为微分算子,ω为电角速度,Ud和Uq分别为D轴电压和Q轴电压。
若考虑弱磁的影响,在传统矢量控制的基础上,通过电压矢量控制得到Idref给定D轴电流。达到期望的目标转速,其控制公式为:

其中,Udc为母线电压。VSmax为端子间电压最大值,KH为弱磁系数(一般设置在0.92~0.95之间), 为电压误差量,PI为PI控制环路增益。
实际使用中往往公式(4)改写成:

2.2 弱磁控制分析
在弱磁时直接从公式(1)分析,去除微分量。可以得到:

在恒功率区域,Uq被限制在VSmax*KH的附近。D、Q轴电流不能独立通过电流环节求出,他们是互相耦合的。传统的双电流环方式毕竟会导致系统的不稳定。
为此我们提出了D轴电流环PI控制解决D、Q轴互相耦合的问题。
单D轴电流环PI控制框图是由速度环PI直接决定了D轴电流的给定,Q轴电压直接给成定值VFWC。
这样的好处有:更简单的系统;不用解耦和分析D、Q轴电流环节;D、Q轴电流环控制没有相互竞争。
但是从原来的双电流环节切入现在的单D轴电流环,其需要解决的问题有:何时从双电流环切入换成单电流环,切入瞬间的平滑处理,VFWC的给定,何时切出从单电流环变化成双电流环。
为此我们提出改进型弱磁方法,在SVPWM中计算T1+T2时刻;
SVPWM中T1,T2的计算方法:

归一化总体时时间为1(每载波周期所消化时间),这样在不进入过调制时,总有如下关系存在:

我们选取低通滤波后的值作为开启模式,这样就解决了切换时刻的问题;
公式(2)中,我们可以看出,在有恒定转矩的情况下,传统的单PI输出的Iqref(Q轴电流参考)必须为正值,如果改成单D轴电流环,其输出的Iqref(D轴电流参考)必须为负值。这样正负切换,必然会带来很大的速度环输出超调。
为此我们需要对速度环做出改良:
传统的速度环:

改良后的速度环:

同时将积分增益重置为0;
在速度环调整的同时,电流环也要调整,
限制Ud的输出,使Ud的输出波动在可控范围内,并且限制PI环的输入;这样切入瞬间就会平滑,无重大频率抖动。
在降速时,弱磁程度会降低,甚至会没有弱磁,这时需要退出单PI电流环,变成双PI电流环。我们只需要判断速度环输出的Iqref是否大于0,基本上可以判定是否退出单PI电流环,同时切换瞬间参考切入瞬间的解决方法即可。
2.3 过调制控制分析与实现
过调制其实最基本的目的是提高母线电压利用率,提高三相输出最大电压基波[3],基波的提高意味着Vsmax*KH的提高,根据公式(6)可以看出Ud,Uq允许输出更高。就可以在不弱磁的情况下,大大提高运行频率。我们在使用过程中,KH的调整就是我们过调制的控制目的。

图1 仿真SVPWM输出的归一化调制比

图2 仿真过调制端子间电压
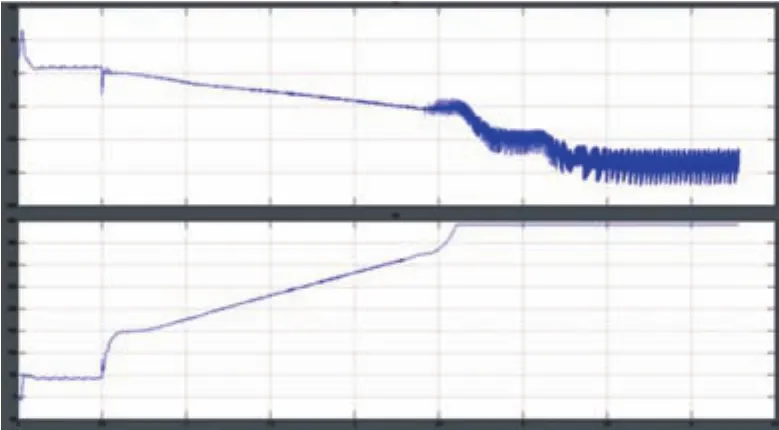
图3 仿真Ud、Uq过调制单PI波形

图4 仿真相电流波形,速度波形,与转矩波形
传统的矢量控制算法步骤必须在电流采样成功后才执行无位置运算,由于大多数压缩机驱动是单电阻采样,在过调制时刻有时会导致电流采样的失败,按照传统的做法,电流采样不成功则无位置运算,这样在过调制瞬间会导致压缩机找不到位置而运行不稳定甚至失步,所以需要改进算法运行结构:
若将电流采样、Park+Clarke变换与无位置运算并行,无论电流采样成不成功,都不会影响磁链的估算或者其他无位置估算算法的执行。这样确保在过调制阶段的位置准确性,就可以执行过调制算法。
2.4 过调制与单电流环PI的结合
虽然过调制可以提高母线电压利用率,推后弱磁频率,但是我们压缩机的频率要求至少达到120Hz以上,只靠过调制提高运行频率是往往不够的,我们还是需要弱磁提速。但是弱磁是以牺牲电机效率为前提的,过调制并没有牺牲电机效率,所以我们的控制策略为:在过调制到达极限时才进入单PI弱磁。尽量用到过调制再用单PI弱磁。
3 仿真计算
我们使用MATLAB/SIMULINK作为仿真软件进行仿真运算。
如图1所示是从开环到闭环,然后到过调制时的整体占空比图形展示,中间经历了单PI电流环与过调制的切换。
如图2所示是压缩机端子间电压波形,可以看到这时的电压波形中间已经没有载波,电压基波提高较大。
如图3所示是压缩机Ud和Uq的电压波形,在进入单PI时Uq电压被锁定,Ud随负载和转速变化而变化。
如图4所示是单PI环切入瞬间的电流波动与过调制情况,可以看出在切入过调制后转矩脉动变大了一些,但是还是在可控范围内。压缩机相电流并没有提升很大。
4 结论
本文通过对传压缩机矢量控制算法分析,提出了新的过调制单PI弱磁算法,推导了压缩机在弱磁时双电流环PI的不稳定性的问题。在使用单D轴电流环PI后解决。同时结合过调制,提高了电压利用率,减小了压缩机运行相电流,提高了压缩机的高频能效。从原理到仿真再到实际试验都验证了算法的可行性和有效性,在压缩机高频弱磁驱动算法中有良好的应用价值。
