载人航天器舱外在轨维修维护地面验证平台设计
2018-08-27魏传锋李兴乾
魏传锋,李兴乾,2,吕 宁,张 伟
(1.中国空间技术研究院 载人航天总体部,北京 100094;2.南京航空航天大学 航空宇航学院,南京 210016)
0 引言
空间站是有人居住的长期在轨运行的航天器,寿命要求一般在10年以上。“礼炮7号”空间站预定在轨寿命4~5年,最终实际在轨工作寿命达8年之久。“和平号”空间站是世界上第一个长久性空间站,设计寿命5年,但是通过维修维护实际在轨运行了15年。国际空间站首个舱段于1998年发射,原设计寿命15年,目前已确定延寿至2024年。国外空间站实际工作寿命的实现,离不开在轨维修维护技术的成功应用[1]。在后勤资源有保障的条件下,通过维修维护可实现空间站长期在轨运行,并在此基础上开展进一步的延寿工作。“和平号”空间站为延长在轨运行时间,站上航天员75%的工作时间用于空间站设备的在轨维修维护。国际空间站自在轨运行以来,航天员日常40%的时间用于开展各类维修维护工作,截至2016年9月,已完成384次出舱活动执行空间站舱外设备的维修维护。国际空间站组装建造期间(2006年—2010年)接收运送的维修备件总质量达32 t,其中舱内备件12 t,舱外备件20 t,占在轨运行期间物资运送总量的8%。组装完成后(2011年—2015年),共接收运送维修备件39 t,其中舱外备件约22 t,舱内备件约17 t,占物资运送总量的21%。从国外空间站的建造和运行经验来看,进行在轨维修维护是保证空间站长期在轨运行的必要手段,舱外维修维护作业在所有已完成的维修维护工作中占有很大的比重[2]。
而要保证空间环境[3]下完成在轨维修维护任务,需要从维修验证需求出发,确定地面验证的任务与功能,建立一套舱外在轨维修维护地面验证平台,在地面开展大量的试验验证[4-6]。
1 地面验证需求分析
载人航天器舱外设备工作在真空环境中,真空环境下某些材料会出现蒸发、升华,造成材料组分的变化、有机物的膨胀,进而改变材料原有的力、热等物理性能和电性能,从而导致机电类设备发生黏着和冷焊效应,造成旋转部件的磨损、粘连和卡死;航天器在冷黑环境中运行,受到周期性的太阳辐照,使舱外设备的温度发生冷热交变,也会导致材料热胀冷缩致出现机构卡滞;航天员在开展舱外维修操作时,需穿着舱外航天服,且舱外航天服手套存在内外压差,航天员的可视性、可达性、可操作性均会受到制约影响。恶劣的维修条件以及航天服约束给舱外维修活动带来很大困难,而舱外活动直接关乎航天员生命安全。同时由于空间碎片、高真空、高低温交变、舱外设备工作对环境的影响等因素,难免会在出舱活动中出现突发情况,对航天员安全和出舱任务的完成带来致命的影响。因此,有必要针对空间环境下的舱外维修操作在地面建立一套验证系统,同步进行在轨操作验证,并在发生意外情况时能快速响应,支持后续出舱活动方案的决策。
航天员执行舱外维修任务时的主要步骤如下:
1)航天员携带维修工具出舱;
2)机械臂将航天员运送至维修工作区域;
3)航天员对待维修设备进行维修或更换;
4)确认维修操作有效后,航天员返回舱内。
目前广泛使用水槽[7]和仿真手段[8-12]对上述工作项目进行验证,缺少空间环境模拟设备和航天员操作模拟设备验证手段。为验证真空、冷黑环境下,机、电、液接口的拆装性能,同时更真实模拟航天员舱外维修穿着舱外航天服受到航天服面窗的视线阻挡,以及手套内外压差对航天员操作关节活动范围、操作精度的影响,需要研制航天器舱外维修维护地面验证平台,为舱外产品提供真空、冷黑试验环境,为航天员精细维修操作提供验证条件,也可为应对后续在轨突发故障提供地面同步支持。
2 地面验证平台任务和功能分配
为支持载人航天器舱外维修验证,同时满足快速响应要求,验证系统需要集成维修操作相关的多环境因素,与不同环境单独模拟(如真空模拟、着服进水槽)相比,验证准备时间应能大幅缩短;同时验证系统应具有丰富的灵活性,能覆盖载人航天器大体量舱外维修设备涉及的各类机、电、液接口。
地面环境模拟系统应具备的功能如下:
1)模拟舱外真空、冷黑环境:为验证舱外设备耐受真空环境的维修性设计和在真空环境下的维修操作能力,使用待维修设备或试验件在真空罐中开展热真空试验。
2)模拟航天员着舱外航天服后的操作。
3)模拟航天员和维修设备间的相对位置关系:在轨维修舱外设备时,航天员固定在机械臂或舱体表面进行维修操作,需在地面模拟在轨实际操作位置,验证设备操作是否可行。地面试验模拟时,维修操作口相对于模拟设备难以移动,需通过伺服机构带动待维修设备运动,使得待维修设备相对于人的操作位置与在轨维修状态一致。
4)维修过程测量需求,包括操作力测试、维修过程摄像记录。
3 地面验证平台系统组成
通过需求分析可知,载人航天器舱外在轨维修维护地面验证平台设备结构以及配套复杂,研制技术难度大。该平台由真空模拟子系统、冷黑环境模拟子系统、热模拟子系统、照明模拟子系统、相对位置模拟伺服子系统、舱外操作手套子系统、试验支持子系统组成,如图1所示。

图1 在轨维修地面验证平台系统组成Fig.1 System configuration of ground test bed for validation of extra-vehicle repairing and maintenance
4 地面验证平台详细设计
4.1 真空模拟子系统
真空模拟子系统由粗抽机组和高真空机组组成。其除了维持容器内真空环境外,还需要提供航天员手套在地面模拟在轨维修操作试验时手套的充压环境,以模拟手套在轨维修操作时的内外压差。程序控制中设置压力自动控制程序,控制流程如图2所示。
4.2 冷黑环境模拟子系统
热沉结构设计方案一般都随真空容器的结构形式而定。本平台真空容器采用卧式圆柱体,故热沉也为同样的形式。整个热沉分成筒体、封头、大门和去污冷屏等部分,每部分热沉都由主管、支管、散热翅片、支撑架和辐射屏等组成,相互构成整体。
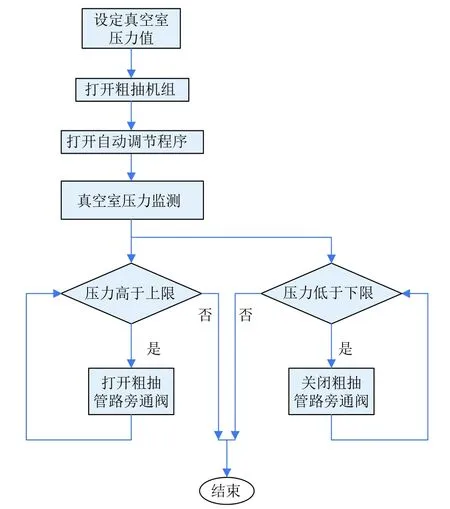
图2 真空模拟子系统压力自动调节控制流程Fig.2 Flowchart of automatic control on vacuum simulation subsystem
4.3 热模拟子系统
热模拟子系统采用红外加热笼进行模拟,由程控电源供电。配备有温度测量和控制系统,具有手动控制和程序控制等工作方式,满足试验过程中热环境的测量和控制需求。
4.4 照明模拟子系统
为对容器内部进行照明,保证观察清晰,照明模拟子系统配置了适合真空低温环境的专用光源,位于设备顶部,角度可以手动调节,确保工作区域照明均匀分布且无死角,保证容器内操作面光照度满足需求。
4.5 相对位置模拟伺服子系统
子系统中的运动系统由移动支架车、机架、旋转机构以及平移机构等部分组成,以满足真空低温环境下的旋转与平移运动功能要求。旋转机构由旋转升降机与试件支撑座组成,平移机构由移动电机、连接螺母座滑动导轨等组成。
4.6 舱外操作手套子系统
舱外操作手套子系统需要模拟在空间舱外维修中航天服手套的状态:手套有一定的压力适应性和密封性,但是又要保持灵活性,确保维修状态正常。手套通过专用法兰接口与真空罐体连接,供操作人员伸入真空舱内的工作台面,进行空间维修模拟操作试验,其典型操作试验如图3所示。

图3 在轨维修维护地面试验平台典型操作试验Fig.3 Typical operation for manned spacecraft extracurricular repairing and maintenance test bed
4.7 试验支持子系统
试验支持子系统包括真空容器,监控与摄像,微量污染物监测等功能单元。
真空容器部分是本系统的主体结构部分,它为各种操作提供有效环境试验空间,同时也是真空获得系统、热沉及液氮外流程和试验测控等各部分汇集的中心。
监视与摄像单元主要用于试验过程中对真空容器内试件及试验设备状态的监视,它具有视野广、实时监测和使用灵活方便等特点,尤其对舱内操作界面可以多角度监控。
微量污染物原位监测单元采用石英晶体微量天平,由控制器和多个微量天平探头组成。
5 结束语
本文从航天器舱外维修验证平台的需求分析,任务和功能分配,系统组成,详细设计等几个方面系统阐述了平台的设计,包括真空模拟子系统、冷黑环境模拟子系统、热模拟子系统、照明模拟子系统、相对位置模拟伺服子系统、舱外操作手套子系统、试验支持子系统等部分。通过集成测试表明,该平台保证了舱外维修维护作业的可视可达,准确模拟了航天员着舱外航天服后的操作能力,可满足航天器舱外维修验证需求。
