关于数码相机定位的研究
2018-08-24肖松平张立臣冉庆波张丽颖任翠环
肖松平 张立臣 冉庆波 张丽颖 任翠环
摘 要:本文对相机成像原理(小孔成像)、图像二值化处理、遗传算法进行了综述,并在相机相对位置确定模型的综述基础上,通过改进遗传算法,确定出来了相机之间的相对位置。针对确定靶标上圆的圆心在该相机像平面的像坐标的问题,首先用MATLAB对图片进行图片二值化和灰度处理,根据处理后的数据求出圆心,然后根据椭圆边界上到圆心距离最短的点的坐标及圆心坐标列出方程,求解出光学中心的像素坐标,最后将光学中心的像素坐标转换为靶标上圆的圆心在像平面上的像坐标。通过对像坐标上增加随机扰动来实现对稳定性及精度的检验,得出圆心像素坐标误差不超过3%,证明该模型稳定性及经度均较高。最后,建立了改进的遗传算法模型,考虑到相机镜头的径向突变,并对其进行修正,确定物体的世界坐标,进而确定两相机之间的相对位置关系。
关键词:数码相机定位;光学中心标定;随机扰动;改进遗传算法
0引言
数码相机定位在交通监管(电子警察)等方面有广泛的应用。所谓数码相机定位是指用数码相机摄制物体的相片确定物体表面某些特征点的位置。最常用的定位方法是双目定位,即用两部相机来定位。对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。只要知道两部相机精确的相对位置,就可用几何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。于是对双目定位,精确地确定两部相机的相对位置就是关键,这一过程称为系统标定[1]。
对数码相机进行定位时,最常用的方法是双目定位法,对物体上一个特征点,用两部固定于不同位置的相机摄得物体的像,分别获得该点在两部相机像平面上的坐标。只要知道两部相机精确的相对位置,就可用幾何的方法得到该特征点在固定一部相机的坐标系中的坐标,即确定了特征点的位置。
1相机定位理论基础
1.1 相机成像原理(小孔成像)
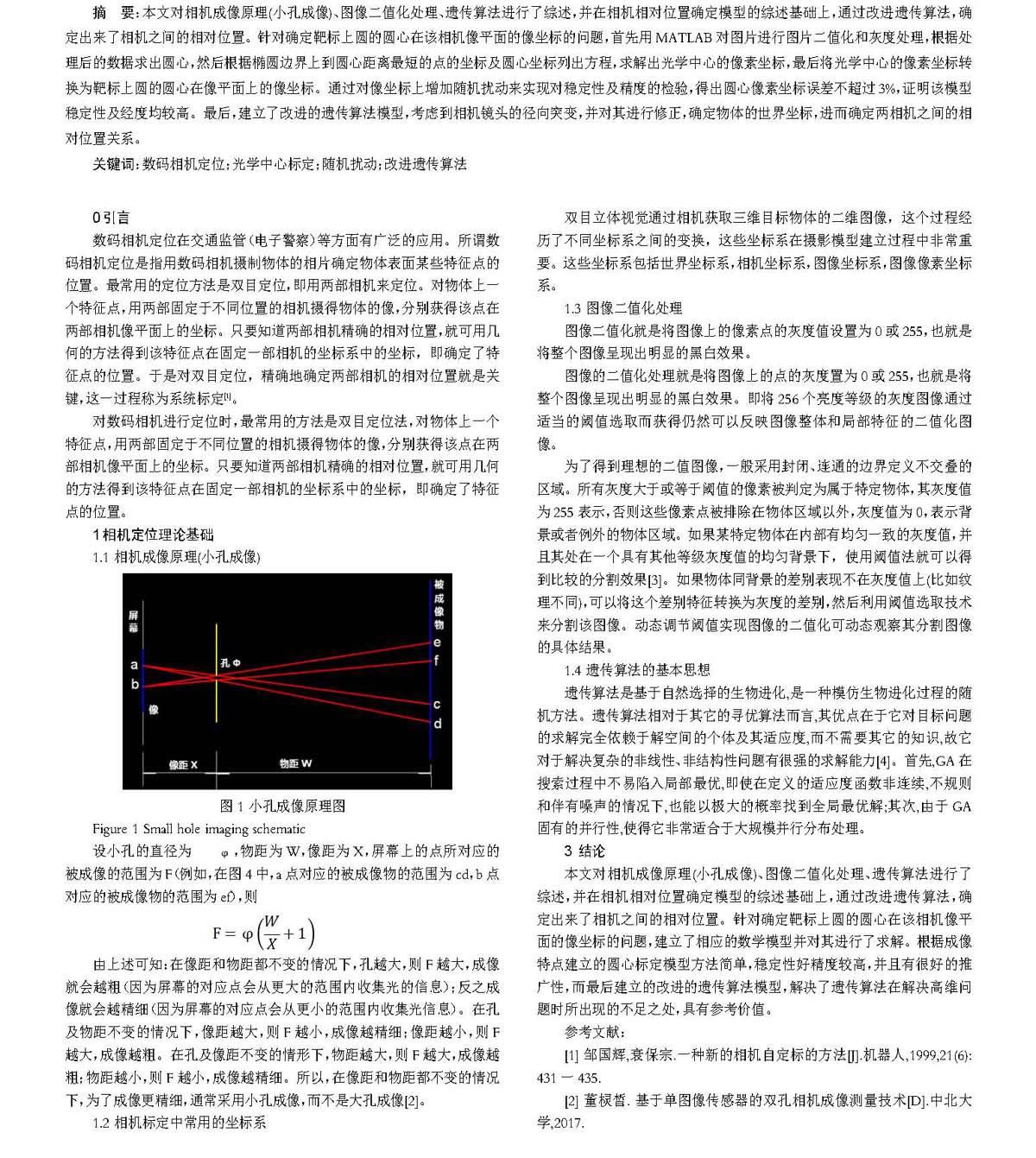
图 1 小孔成像原理图
Figure 1 Small hole imaging schematic
设小孔的直径为 ,物距为W,像距为X,屏幕上的点所对应的被成像的范围为F(例如,在图4中,a点对应的被成像物的范围为cd,b点对应的被成像物的范围为ef),则
由上述可知:在像距和物距都不变的情况下,孔越大,则F越大,成像就会越粗(因为屏幕的对应点会从更大的范围内收集光的信息);反之成像就会越精细(因为屏幕的对应点会从更小的范围内收集光信息)。在孔及物距不变的情况下,像距越大,则F越小,成像越精细;像距越小,则F越大,成像越粗。在孔及像距不变的情形下,物距越大,则F越大,成像越粗;物距越小,则F越小,成像越精细。所以,在像距和物距都不变的情况下,为了成像更精细,通常采用小孔成像,而不是大孔成像[2]。
1.2 相机标定中常用的坐标系
双目立体视觉通过相机获取三维目标物体的二维图像,这个过程经历了不同坐标系之间的变换,这些坐标系在摄影模型建立过程中非常重要。这些坐标系包括世界坐标系,相机坐标系,图像坐标系,图像像素坐标系。
1.3 图像二值化处理
图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果。
图像的二值化处理就是将图像上的点的灰度置为0或255,也就是将整个图像呈现出明显的黑白效果。即将256个亮度等级的灰度图像通过适当的阈值选取而获得仍然可以反映图像整体和局部特征的二值化图像。
为了得到理想的二值图像,一般采用封闭、连通的边界定义不交叠的区域。所有灰度大于或等于阈值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,表示背景或者例外的物体区域。如果某特定物体在内部有均匀一致的灰度值,并且其处在一个具有其他等级灰度值的均匀背景下,使用阈值法就可以得到比较的分割效果[3]。如果物体同背景的差别表现不在灰度值上(比如纹理不同),可以将这个差别特征转换为灰度的差别,然后利用阈值选取技术来分割该图像。动态调节阈值实现图像的二值化可动态观察其分割图像的具体结果。
1.4 遗传算法的基本思想
遗传算法是基于自然选择的生物进化,是一种模仿生物进化过程的随机方法。遗传算法相对于其它的寻优算法而言,其优点在于它对目标问题的求解完全依赖于解空间的个体及其适应度,而不需要其它的知识,故它对于解决复杂的非线性、非结构性问题有很强的求解能力[4]。首先,GA在搜索过程中不易陷入局部最优,即使在定义的适应度函数非连续,不规则和伴有噪声的情况下,也能以极大的概率找到全局最优解;其次,由于GA固有的并行性,使得它非常适合于大规模并行分布处理。
3 结论
本文对相机成像原理(小孔成像)、图像二值化处理、遗传算法进行了综述,并在相机相对位置确定模型的综述基础上,通过改进遗传算法,确定出来了相机之间的相对位置。针对确定靶标上圆的圆心在该相机像平面的像坐标的问题,建立了相应的数学模型并对其进行了求解。根据成像特点建立的圆心标定模型方法简单,稳定性好精度较高,并且有很好的推广性,而最后建立的改进的遗传算法模型,解决了遗传算法在解决高维问题时所出现的不足之处,具有参考价值。
参考文献:
[1] 邹国辉,衰保宗.一种新的相机自定标的方法[J].机器人,1999,21(6):431一435.
[2] 董棂皙. 基于单图像传感器的双孔相机成像测量技术[D].中北大学,2017.
