基于虚拟仪器的电液舵机测试系统
2018-08-24,,
,,
(1.西北工业大学 自动化学院,西安 710000; 2.深圳海能达通信股份有限公司,广东 深圳 518000)
0 引言
舵机是各种飞行器的重要组成部分,是飞行器系统的执行机构,舵机系统接收飞控计算机给出的舵面偏角指令,输出指令信号来操纵飞行器翼的舵面偏转,从而改变飞行器的飞行姿态或飞行轨迹,以达到控制飞行器飞行的目的[1]。舵机对于飞行器的飞行控制以及安全都有着重要的意义,因此对于舵机性能的测试就显得尤为重要。该测试对象是航空飞行器上使用的液压舵机,由于该型号舵机采用电动机带动油泵产生油压来驱动,因此被称为电液舵机,现在已广泛在各类飞行控制器上。
电液舵机在早期的性能测试方式中,主要为试验人员手动测试,在测试的过程中,试验人员不停的通过模拟仪器记录各种数据,然后对数据进行相关的分析计算从而得到舵机的性能参数。这种测试方式耗费时间长,操作复杂,而且人工测试精度相对较低。
针对以往测试中的缺点,提出了基于虚拟仪器的软硬件开发平台,设计了一套操作简单且测试精度高,同时性能稳定并能重复测试的舵机测试系统。对于不同型号的舵机,只需要更改相应的数据采集设备就能实现对多个型号的舵机的测试,能够实现测试的多样化和智能化。
1 电液舵机的结构及原理
电液舵机作为一个高精度、高耦合的伺服控制系统,其作用从信号的转换关系来说,是将输入的电信号转变为驱动负载的机械位移或者力(力矩)输出信号,并使输出信号的变化精确地跟踪输入信号的变化[2],被广泛应用于航空飞行控制系统中。本文测试的舵机其结构如图1所示。
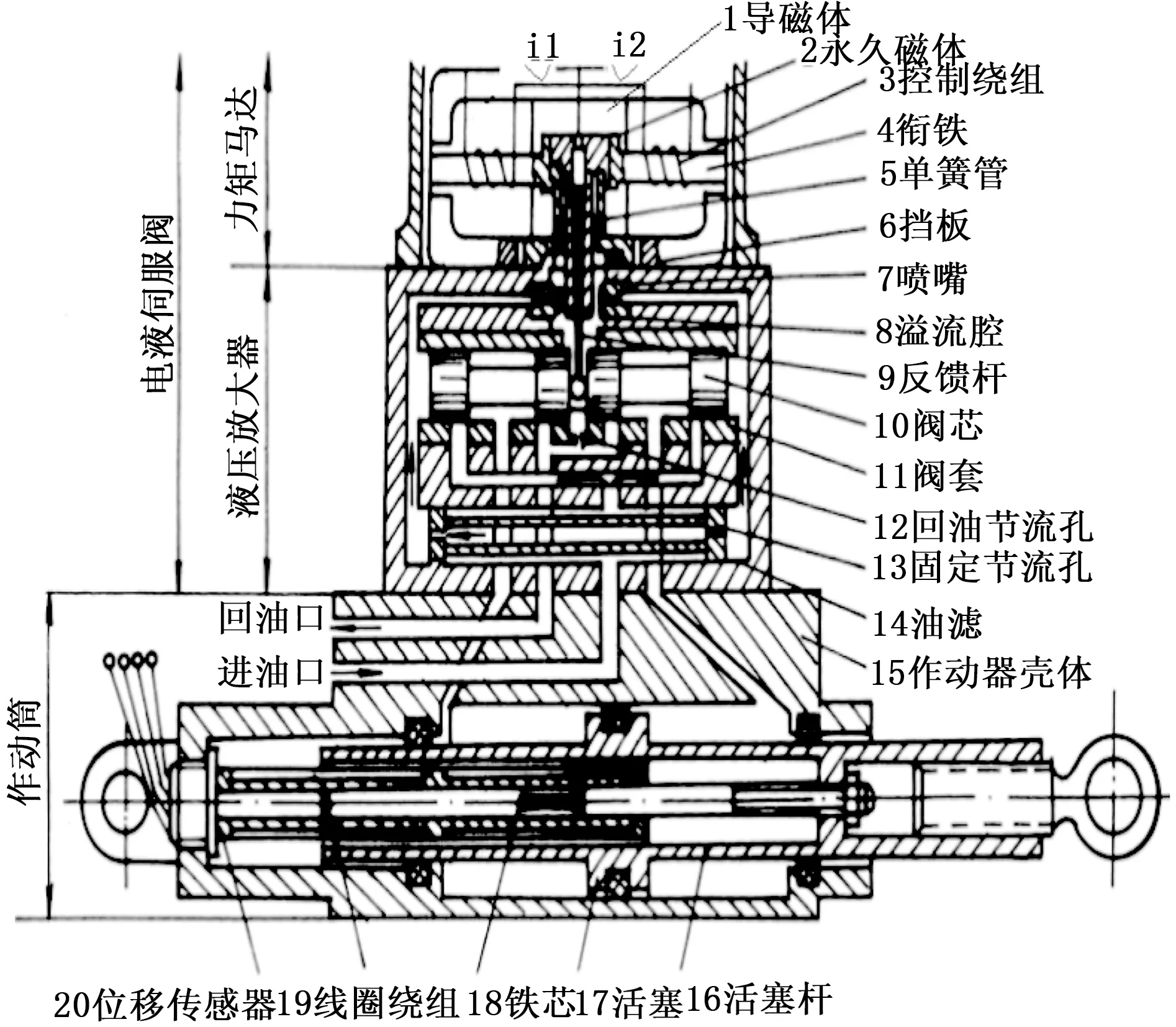
图1 电液舵机结构图
此型号舵机由液压传动系统、电气控制系统和机械系统三部分组成,主要包括力矩马达、伺服放大器、电液伺服阀、作动器和位移传感器。电液舵机的工作过程是一个由“电信号-机械信号-位置信号”的转换过程。控制绕组两端连接的控制电流信号的变化会使得力矩马达产生转动,从而导致气隙磁通量改变,打破原本电磁力平衡的状态,衔铁两端产生一个电磁力矩,电磁力矩促使衔铁转动而引起弹簧管的变形,这一过程在电磁原理的作用下完成了电信号到机械信号的转换。弹簧管的变形改变了挡板到两个喷嘴之间的距离,距离的变化引起阀芯两个端面上产生一定的压差,在压差的作用下电液伺服阀阀芯产生偏移,偏移量与控制绕组上电流量大小成正比,偏移的方向则取决于电流的极性。阀芯在移动的时候打开了阀套上的窗口,高压油经过阀套上的窗口流入作动筒的一腔,使得两腔压力的失衡,从而引起作动器活塞杆移动[3],这一过程完成了机械信号到位置信号的转换。位移传感器记录活塞杆的输出位移并将其转换成电信号传输到测试装置。
由图1可以看出,电液舵机内部结构复杂,即包括了伺服阀控制系统(图中的控制绕组),又包括了液压系统(图中舵机进油通道和回油通道),还包括了传感器信号系统(图中位移传感器),所以电液舵机性能的测试是一个庞大的系统,需要设计多种辅助设备。针对电液舵机以上的特点,设计了泵源系统为待测试的某型舵机提供系统油压,设计PLC控制器控制泵源的工作,在虚拟仪器CVI的平台上设计上位机程序完成部分传感器信号的采样、舵机控制信号的给定等,设计下位机完成部分传感器信号的采集以及具体对于电液舵机的控制,设计各类传感器信号的调理电路完成对于信号的转换和去除外界的干扰。各个部分相互作用紧密结合共同组成了电液舵机的测试系统,各个环节条理分明各司其职,确保测试系统高效可靠运行,完成某型舵机的性能参数的自动化测试。
2 电液舵机测试系统的硬件设计
舵机测试系统硬件部分主要由工控机,采集卡,传感器,电源系统,PLC控制柜,上下位机控制柜,液压泵站等部分组成。测试系统各部分硬件关联图如图2所示。
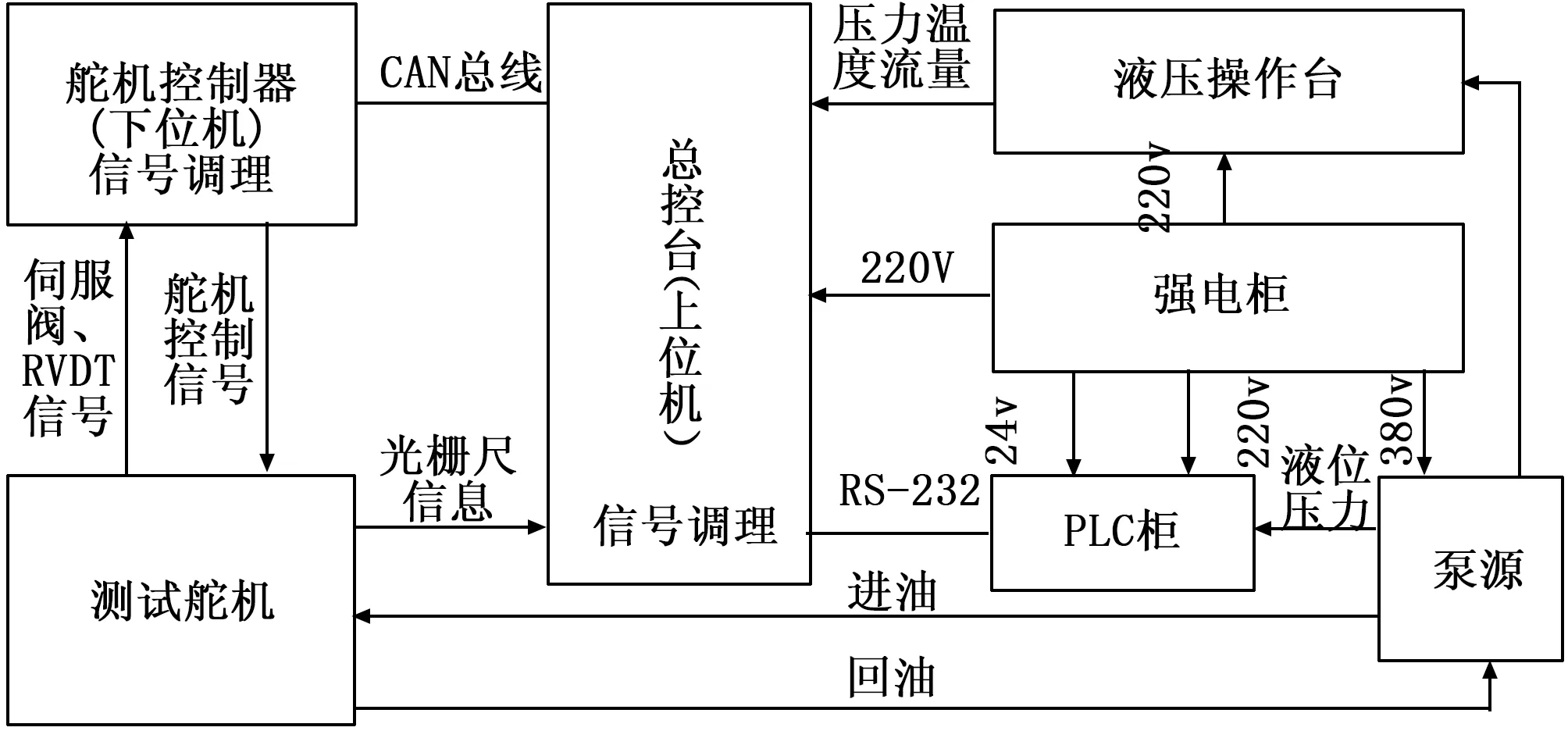
图2 舵机测试系统的各部分关系图
2.1 测控系统
测控系统主要由4部分构成:1)测控计算机,它是舵机测试系统的核心,可以使得测试自动化,精确化,本测试系统中采用研华公司的两台IPC-610L双核工控机分别作为上下位机对测试系统进行控制。上位机负责接收来自液压操作台、PLC控制器和测试舵机的信息,并经过分析处理,通过RS-232通讯总线对PLC控制器下达泵站的控制指令,通过CAN总线通讯对下位机的舵机控制器下达伺服阀和电磁阀的控制指令,舵机控制器作为下位机是具体的执行机构,接收来自上位机指令信号并控制电磁阀和伺服阀的相应动作。2)各类传感器测量装置,主要包括压力、液位、温度、流量和线位移传感器。压力传感器采用星仪的CYYZ11系列,量程0~35 MPa,传感器输出为4~20 mA的电流信号;液位传感器选用联测2 088系列,量程范围0~2 000 mm,输出为4~20 mA电流信号;温度传感器选用联测PT100热电偶温度传感器,测量温度-50~200 ℃,输出为4~20 mA电流信号;流量传感器选用LWGYD-015-B-A-A防爆型涡轮智能流量计,测量的最大流量6 m3/h,采用24 V供电,输出为4~20 mA电流信号;位移传感器选用SGC5H24100型光栅尺,最大测量范围100 mm,经过24位高速计数器直接在上位机输出显示测量的位移量。3)匹配上下位机的数据采集板卡,主要有研华的PCI-1716、PCI-1710和PCI1-723板卡,PCI-1716和PCI-1710主要负责模拟信号的输入和数字信号的输入输出,PCI-1723主要负责伺服阀波形模拟信号的输出。4)PLC控制柜,选用西门子S7-200系列PLC,它作为泵源和上位机之间的一个中介环节,负责泵源部分和上位机之间的信息互通和对泵源部分的控制。
2.2 电源系统
电源系统是整个测试装置的动力源,工业380 V用电通过强电控制柜产生380 VAC、220 VAC和24 VDC三种电压,380 VAC供给额定电压380 V、75 kW的异步电机,异步电机带动派克液压泵产生系统所需的27.4 MPa的液压压力,220 VAC分别为上下位机,PLC控制柜、液压操作台等设备供电,24 VDC给各路传感器供电并且作为电源模块负责信号调理电路的正常工作。
2.3 液压泵站系统
泵站主要由泵源和液压操作台组成,泵源通过油滤滤除油液中的杂质,保持油液的干净,通过减压阀给整个系统提供所需的0~27.4 MPa的各种等级的压力,保证液压系统的安全稳定运行,使得测试系统能够在要求的不同工况下进行测试试验,接受PLC的控制指令并且把液位、系统压力和油液温度等信息上传给PLC;液压操作台负责试验油路选择,检测油液的压力、温度和流量等信息并传输给上位机处理。
2.4 通讯系统
通讯系统主要作用是传递舵机测试系统中的各种指令信息和数据信息。测试系统中有两种通讯方式:RS-232串行通讯和CAN总线通讯。RS-232通讯是PLC和上位机之间的通讯方式,主要将PLC接收到的泵源部分的比例溢流阀、水阀和电磁换向阀的信息传递给上位机,并且将上位机对于泵站的控制指令传输到PLC;CAN总线通讯以研华PCI-1680通讯板卡为基础为上下位机提供通讯,上位机将舵机的控制指令传递通过CAN总线传递到下位机的舵机控制器,舵机控制器将传感器采集的部分信息通过CAN总线反馈给上位机人机交互界面显示。
3 测试软件设计
测试软件设计的原则是使舵机测试试验步骤操作更加简单,测试程序更加简洁,人机交互界面更加明了,并且方便于系统的调试和维护,所以软件的开发平台要具有良好的通用性和良好的交互界面。测控软件采用基于Windows操作系统NI公司开发的LabWindows/CVI[4]作为测试软件开发的平台,其具有虚拟仪器功能,各功能全部通过清晰的按钮来操作,从而使系统具有良好的人机操作界面[5],在舵机的测试程序中采用多线程处理、RTX实时操作系统和TDMS存储技术等核心技术。
多线程技术:它能在舵机测试系统中实现测试任务的多项运行,实现了实时检测的目的[6],舵机测试系统中建立了CAN总线信息发送接收线程和传感器信息采集线程,充分利用CPU的空闲片段,使得在测试系统在执行传感器数据的采集、上下位机信息的传输和测试试验多项任务时可以降低对系统运行速度的影响,大大提高了测试效率。
RTX系统:在测试系统中,数据处理实时性对于测控结果,影响重大,测试系统中采用的RTX系统是Windows环境下的软件实现的硬实时系统,其拥有采用抢占式优先级的高效任务管理器[7],来保证程序运行的实时性以及采集数据的实时性处理。
TDMS存储技术:由于测试系统数据采集速度快,精度高,而且要求保存所有采集的试验数据,为了避免数据保存混乱甚至丢失,采用TDMS存储方式存储试验数据。TDMS 内部的核心结构就是Segment,可以称作“片段”,是物理结构层面的概念,Segment 是存储和读取数的最小单元,我们在写 TDMS 文件的时候,一个 Segment 可能包含一个或多个通道组或者通道,数据类型也可以不同,一个 Segment 中可以仅包含元数据或者属性数据[8],TDMS内核片段的结构决定了TDMS高速的存储和读取数据的特点,从而保证了试验数据的完整性和准确性。
虚拟仪器编程语言LabWindows/CVI采用基于ANSIC内核的事件驱动与回调函数编程方法,利用强大的用户界面编译器和库,可方便地实现用户图形界面文件创建和编辑,在编辑完成后,能够自动生成源代码文件[9],将C语言与数据采集、分析和处理有机地结合起来。测试软件功能框图如图3所示。
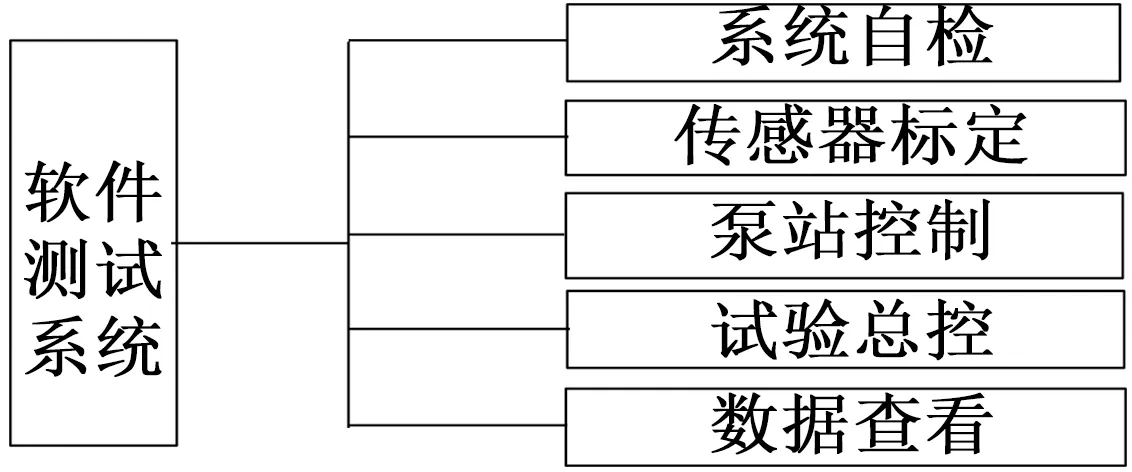
图3 舵机测试软件功能框图
系统自检功能主要是在测试试验开始之前检查油源的温度、油箱中油液的液位、上位机与PLC的RS-232串行通讯和上下位机的CAN总线通讯,当这四项检查全部完成并且完全正常,方可进行舵机的测试试验;传感器标定主要针对长时间工作在现场复杂试验环境中的传感器其增益和零偏发生偏移的情况,定期对传感器的增益和零偏进行校正,不仅能够使得传感器采集的数据更加精确,而且也使得舵机性能测试结果更加准确;泵站控制界面主要监控系统泵站的工作状态和对泵站进行远程控制,当远程对泵站进行启停、带载卸荷以及急停等操作的时候,上位机的控制指令通过RS-232串行总线到达可编程逻辑控制器PLC,PLC执行指令控制泵站的动作;试验总控部分负责传感器采集信息与各通道数据实时更新显示、 电磁阀伺服阀的控制以及整个测试试验的选择与控制;数据查看功能主要观察舵机测试过程中利用TDMS存储技术保存的试验数据。
测试程序采用分散式结构,与集中式结构相比,其拥有更强的稳健型和自我纠错能力。舵机测试系统软件的上、下位机的功能和流程图分别如下。
3.1 上位机功能
上位机是整个测试系统的指挥中心,主要负责系统泵站的控制、实时显示直接采集的传感器信息和通过下位机传输过来的传感器的信息、选择各试验通道电磁阀的开关和伺服阀控制指令的给定、选择测试试验的项目并保存试验结果以及对系统进行自检和对各路传感器的增益零偏进行标定。上位机程序流程图和主测试界面分别如图4和图5所示。
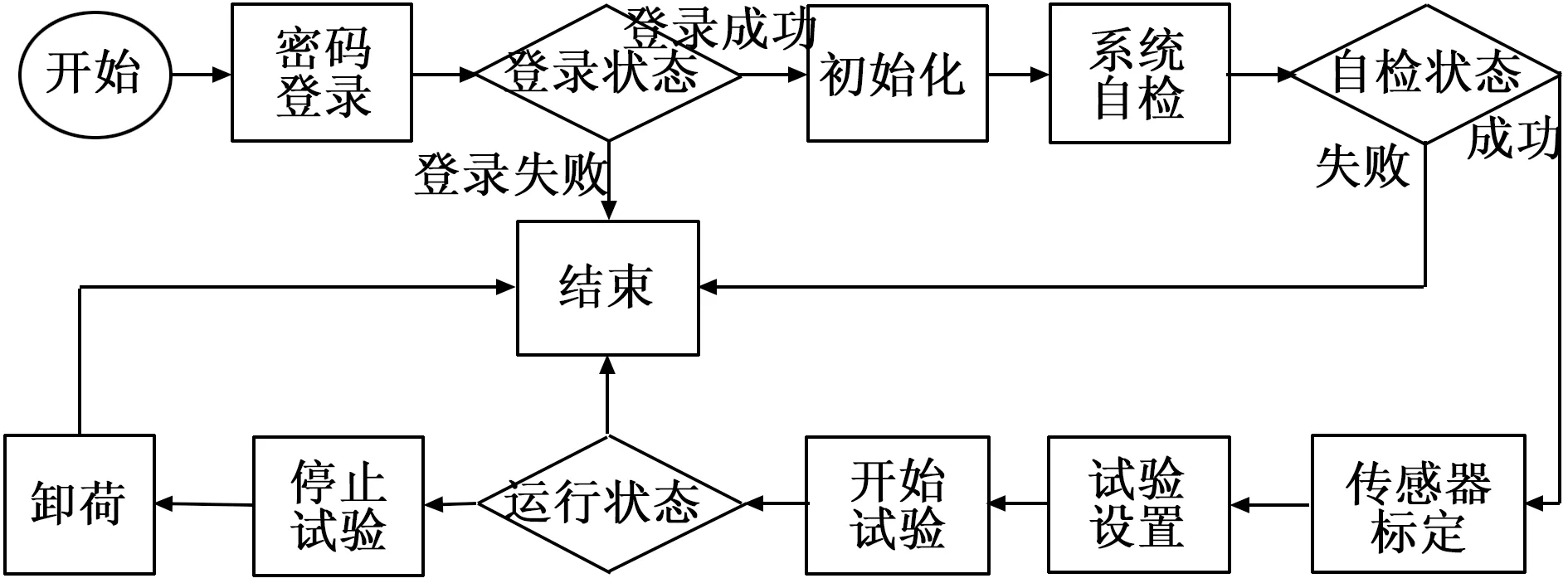
图4 上位机程序流程图
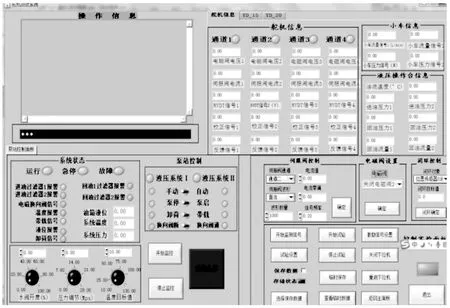
图5 上位机的软件界面
3.2 下位机功能
下位机有两种运行状态:手动状态和自动状态。手动状态下,上位机无法通过CAN总线向下位机传输控制指令,下位机自身通过交互界面控制电磁阀的开通关闭,控制伺服阀信号的给定以及PID参数的设置,因为上下位机现场的摆放有一定的距离,所以下位机的手动状态一般用作系统的调试;自动状态下,上位机通过CAN总线向下位机传输控制指令,下位机程序根据指令信号执行相应的动作,给定舵机伺服阀相应的波形控制信号、给各传感器提供激励信号、给各路电磁阀提供开关信号、采集各传感器的信号和测试系统运行的状态信号等。下位机程序流程图和主界面分别如图6和图7所示。
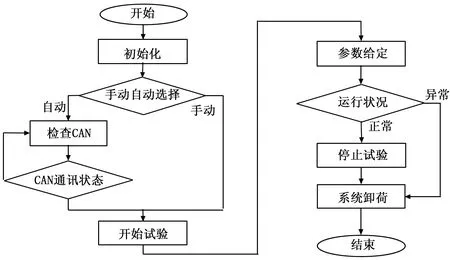
图6 下位机程序流程图
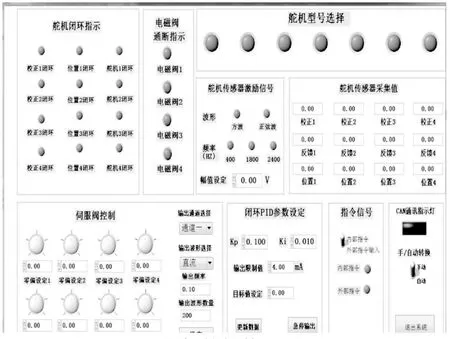
图7 下位机的软件界面
3.3 PLC功能
在舵机测试系统中PLC作为上位机和泵站的中间环节,接收上位机指令实现泵站部分的控制和上传泵站运行的状态信息到上位机。上位机通过RS-232串行总线将泵站的控制指令传输给PLC,PLC通过内部的程序实现电机的启动停止、系统压力的调节、水阀开度的调节、换向阀的打开与关闭以及系统的带载和卸荷,并且PLC通过RS-232串行总线实时上传泵站的运行状况到上位机,以便上位机进一步的控制。
4 测试结果与分析
在环境温度25 ℃(±10 ℃)、工作液温度40 ℃(±10 ℃)、供油压力26 MPa(+0.5 MPa)、回油压力0.39~0.52 MPa、相对湿度45%~80%、大气压力630~800 mmHg的条件下,按照测试大纲的要求对舵机部分性能进行测试,测试结果如图8所示。
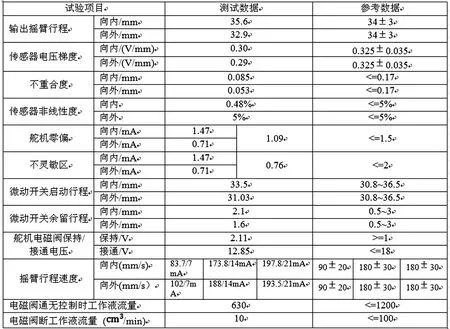
图8 电液舵机测试结果
在实际某型号舵机性能参数测试过程中,所设计的基于虚拟仪器的自动化测试系统工作稳定,操作简便,很好的完成了某型舵机的测试任务,与以往的传统测试方法相比极大的提高了舵机性能测试的效率,非常有利于批量测试和多样化测试。从图8中的测试结果来看,基于虚拟仪器的舵机测试系统有着不错的可靠性,对于某型舵机部分性能参数的测试结果基本符合给定的参考数据。
5 总结
设计的基于虚拟仪器的电液舵机测试系统,功能良好,测试便捷,可靠性高,稳定高效完成了对于某型舵机性能的自动化测试,测试结果与给定参考值接近,测试效率和精度相比以往都有了一定的进步。并且,该测试系统具有一定的扩展性,针对同类的不同型号的电液舵机,只需更改传感器部分的硬件电路便可以完成相关性能的测试,在一定程度上,提高了测试系统的通用性。
