模糊自整定PID控制在油轮辅锅炉中的应用
2018-08-23王敏王晓雨
王敏,王晓雨
(西北工业大学明德学院,陕西 西安 710103)
1 PID控制器
PID控制系统是由被控对象、检测装置和PID控制器组成的闭环控制,依据反馈原理实现对系统的控制。PID控制系统中,给定期望值x(t)与输出实际值y(t )相比较,得到控制偏差e(t),对偏差经比例、微分、积分后做线性组合可构成系统的控制量。
PID控制器系统的控制量为:

由式(1)可知,KP、 KI、KD分别是比例项、积分项和微分项的系数,三个参数的改变直接影响控制量的输出,从而影响系统的控制效果。若被控对象中某些参数发生了变化,为了达到理想的控制效果,则可引入参数辨识器以PID控制的初始值为基础自动调整KP、 KI、 KD。
2 模糊自整定PID控制器
2.1 模糊自整定PID控制器原理
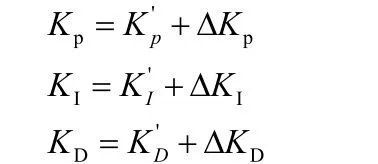
本文采用两输入—三输出模糊控制器来实现PID参数自整定,其输入为偏差e 和偏差的变化率e˙,输出为PID的参数变化量 Δ Kp、 Δ KI、 ΔKD。首先根据经验确定出模糊控制器输入输出之间的模糊规则,然后由检测所得的e 和e˙推理得到三个输出量,再根据经典PID控制中所得到的、的数值,实现参数的在线修改,具体计算公式如下:
2.2 模糊化
模糊控制器的输入为系统的偏差e和偏差 变 化 率e˙, 输 出 为 ΔKp、 ΔKI、ΔKD。 按 照 适当的比例将其转化为模糊集上的论域数值为:

对应模糊子集为:

各元素从左到右依次表示负大、负中、负小、零、正小、正中和正大。
本文中NB和PB的模糊子集的隶属度函数采用正态分布型曲线,NM、NS、ZO、PS、PM采用三角形分布型曲线。
2.3 模糊规则
控制规则是对操作人员的实际操作经验进行总结、推理和加工而得到的,是模糊控制的核心内容。根据模糊控制器e 和e˙的取值不同,ΔKp、 ΔKI、ΔKD的取值如表1所示。
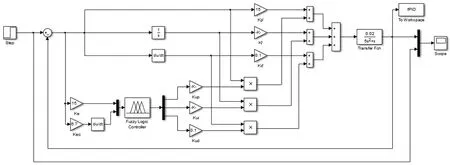
图1 油轮辅锅炉控制系统仿真模型
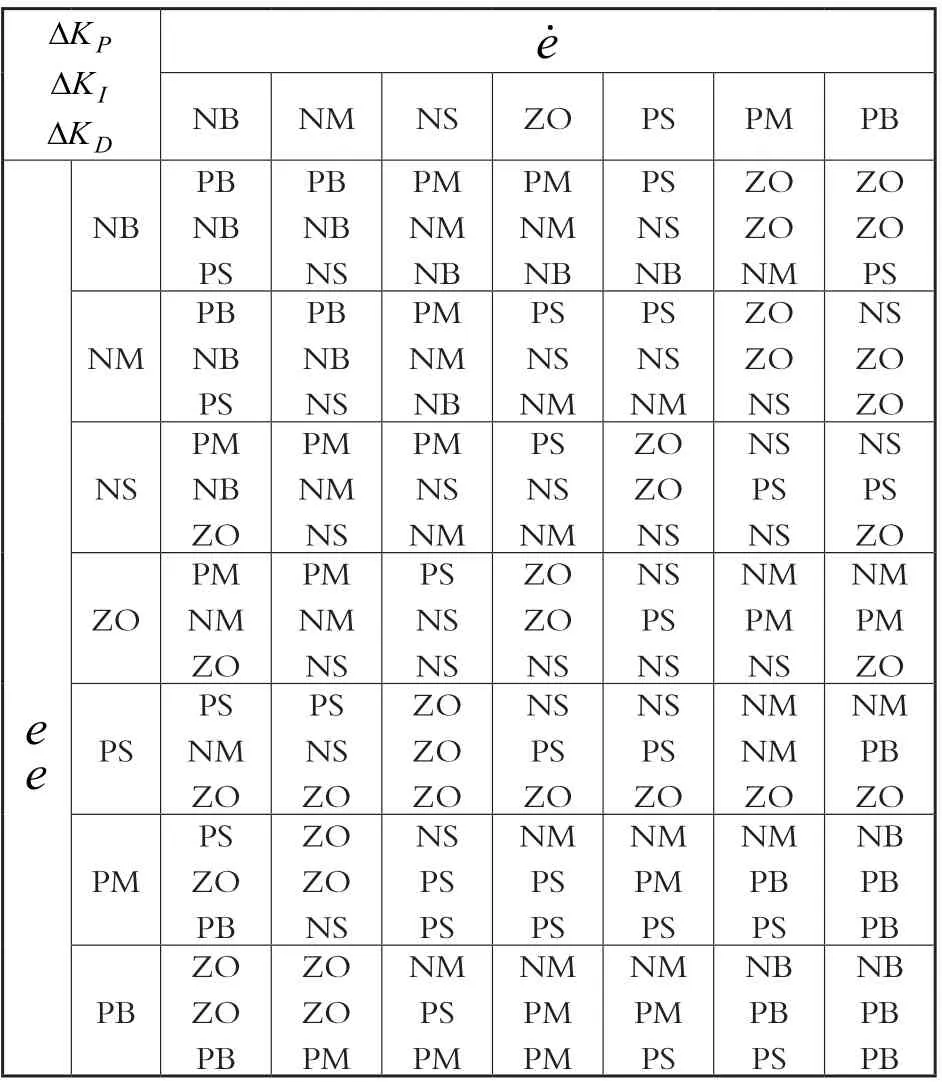
表1 模糊控制规则表
3 仿真研究
本文以油轮辅锅炉为控制对象,工作压力为0.686MPa,蒸汽的蒸发量为2.4t/h,建立系统传递函数:

ε表示汽包水位的反应时间,通常取30s到100s之间得任意整数,即,T表示时间常数,在这里取,则传递函数为:
应用Matlab/Simulink软件,建立油轮辅锅炉模糊自整定PID控制系统的仿真模型,如图1所示。
油轮辅锅炉系统在PID控制和模糊自整定PID控制时系统的阶跃响应曲线如图2所示。
4 结语
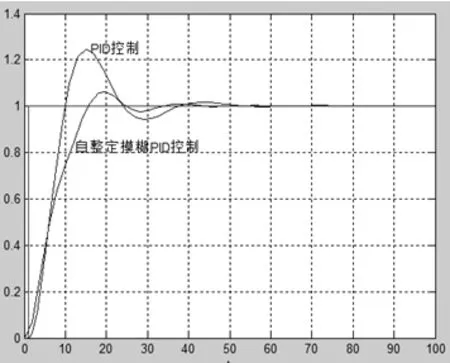
图2 油轮辅锅炉控制系统响应曲线
对于油轮辅锅炉系统,经典PID控制中KP、 KI、 KD均为常数,不能适应参数的变化实现自适应控制。本文设计了一种模糊自整定PID控制器,该控制器以经典PID控制所得KP、 KI、KD为初值,结合模糊控制思想实现了KP、 KI、KD3个参数的在线修正。应用Matlab/Simulink软件进行仿真,将经典PID控制系统和模糊自整定PID控制系统的仿真结果进行对比,并分析增大时间常数T前后的系统性能指标。结果表明,模糊自整定PID控制方法具有上升时间快、超调小、动态响应好、鲁棒性能强的优点。