基于ANSYS的触头电动斥力仿真研究
2018-08-22岳鹏
岳鹏
摘要:本文采用有限元分析软件ANSYS对自动转换开关电器的触头进行电动斥力的仿真,通过仿真分析了触头在闭合状态下电流、磁场和电动斥力的分布并将仿真的电动斥力结果与理论结算结果相对比。
1 接触系统的结果分析
本文分析的自动转换开关电器的触头系统额定电流为63A,短时耐受冲击电流为5000A,,简化后的触头模型如图1所示。
本文中的结构模型通过cero2.0软件建立,该模型有动触头、动触头片、静触头、静触头片四部分组成。
2 接触系统的仿真模型简化及分析
2.1 仿真模型的构建
电动斥力在本文中值得就是HOLM力,其只在动静触头接触时存在,实际上触头的接触表面都是凹凸不平的,因此都将导电斑点假设为理想体来计算HOLM力值,本文假设只有一个导电斑点存在于动静触头之间,并且导电斑点位于中心位置处。
当按照圆柱形导电斑点计算时,圆柱形导体的截面半径b用式(1)[1]计算。
(1)
式中,P为动静触头接触触压力,取20N;H为触头材料的硬度,取1000N/mm2;ξ为跟系统表面接触状况有关的系数,取0.5。
将实际中测得的触头压力20N,带入式(1)中,可求得接触半径b为0.1mm,因而取导电桥的半径为0.1mm;本文经过多次仿真发现,导电桥高度为0.1~0.2mm区间内的值时对仿真结果影响不大,所以本文中的导电桥高度取0.1mm。本文这种结构电动斥力主要是HOLM力产生的,平行导体电动力是不存在的,所以仿真出的结果就是HOLM力。用cero2.0软件创建的动静触头模型如图2所示。
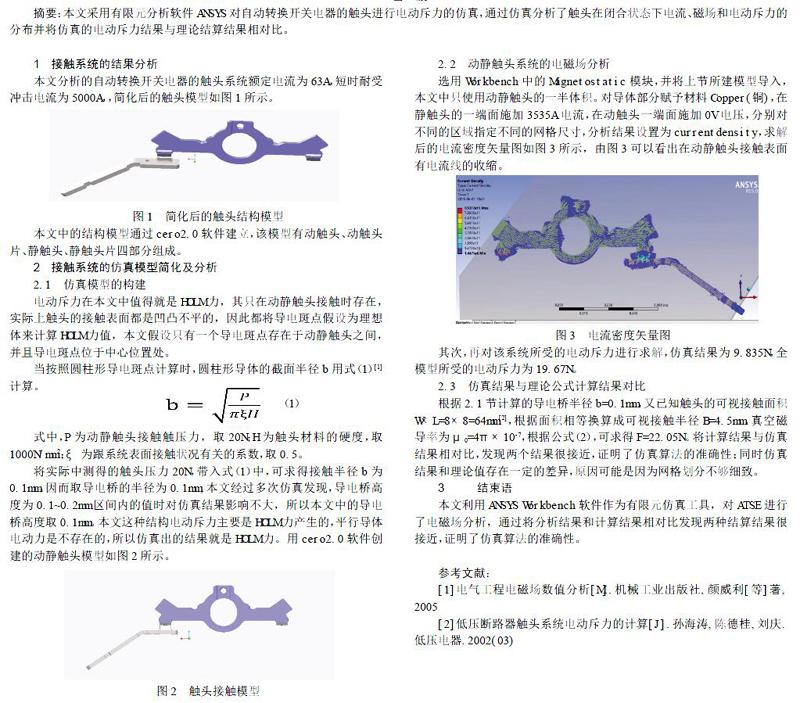
2.2 动静触头系统的电磁场分析
选用Workbench中的Magnetostatic模块,并将上节所建模型导入,本文中只使用动静触头的一半体积。对导体部分赋予材料Copper(铜),在静触头的一端面施加3535A电流,在动触头一端面施加0V电压,分别对不同的区域指定不同的网格尺寸,分析结果设置为currentdensity,求解后的电流密度矢量图如图3所示,由图3可以看出在动静触头接触表面有电流线的收缩。
其次,再对该系统所受的电动斥力进行求解,仿真结果为9.835N,全模型所受的电动斥力为19.67N。
2.3 仿真结果与理论公式计算结果对比
根据2.1节计算的导电桥半径b=0.1mm,又已知触头的可视接触面积W×L=8×8=64mm[2],根据面积相等换算成可视接触半径B=4.5mm,真空磁导率为μ0=4π×10-7,根据公式(2),可求得F=22.05N。将计算结果与仿真结果相对比,发现两个结果很接近,证明了仿真算法的准确性;同时仿真结果和理论值存在一定的差异,原因可能是因為网格划分不够细致。
3 结束语
本文利用ANSYS Workbench软件作为有限元仿真工具,对ATSE进行了电磁场分析,通过将分析结果和计算结果相对比发现两种结算结果很接近,证明了仿真算法的准确性。
参考文献:
[1]电气工程电磁场数值分析[M].机械工业出版社,颜威利[等]著, 2005
[2]低压断路器触头系统电动斥力的计算[J].孙海涛,陈德桂,刘庆.低压电器.2002(03)
