无人艇非线性K-T模型参数辨识算法
2018-08-17姜晓政
陈 霄, 刘 忠, 姜晓政, 董 蛟
(海军工程大学电子工程学院,武汉 430000)
0 引言
无人水面艇(Unmanned Surface Vehicle,USV,简称为无人艇)作为一类在复杂海洋环境下自主航行完成各种使命任务的运载平台,与无人机、无人车和无人潜航器组成四大无人运载系统[1],具有机动性好、隐蔽性强、自动化程度高、无人员伤亡等优势,在军事和民用领域具有广阔的应用前景[2]。无人艇的自主航行、自动避碰等运动控制问题已成为国内外研究的热点。无人艇自主航行等效果的好坏不仅依赖于各种先进的控制算法,还取决于被控对象模型的辨识精度,因此获取无人艇模型是设计各类运动控制器的基础,也是研究无人艇自主控制技术的核心问题之一[3]。系统辨识的方法通常被用于线性和非线性模型参数的确定,主要包括最小二乘及扩展最小二乘法[4]、极大似然估计法[5]、扩展卡尔曼滤波法[6]、模型参考自适应法[7]、梯度校正法[8]及基于人工智能辨识算法[9]等。其中,最小二乘法是系统辨识中最常用的方法,具有系统先验知识少、算法简单、计算量小、收敛性好等优点。孙晓界等通过分析Z形和定常回转实船操纵性试验数据,利用递推最小二乘法辨识得到无人艇线性K-T模型,并通过Z形操舵试验验证了模型的正确性,但并未考虑模型的非线性因素[3];秦余刚等提出了一种快速收敛迭代学习最小二乘法并将其用于船舶K-T模型的参数辨识,仿真结果表明,该算法具有较高的辨识精度,但是迭代学习的引入导致算法复杂性和耗时增加[10]。
本文以某无人艇为研究对象,建立响应型三自由度非线性数学模型,在研究国内外现有无人艇操纵模型参数辨识算法的基础上,综合考虑算法的辨识精度和实用性,提出了一种基于分步实艇数据处理的模型参数辨识算法,详细给出了辨识过程,并基于Z形操舵试验,通过所辨识出的模型仿真结果和实艇试验数据对比,验证了所辨识模型的正确性。
1 无人艇操纵运动数学模型
通常情况下,设计航向控制器时,船舶水平面内的运动数学模型常采用Nomoto模型,但是该模型是在低频小舵角的假设条件下进行推导的,而无人艇有着更快的航速和更好的机动性,通常需要高频操舵,因此Nomoto模型不适用于无人艇[11-12]。本节在考虑无人艇特性以及模型非线性的基础上,采用Norrbin模型来进行航向控制器的设计,即

(1)

(2)
式中:ψ为航向角;δ为舵角输入;δr为未操舵时维持直航的压舵角;T为追随性指数;K为回转性指数;HN(ψ)为非线性项,用于描述无人艇的操纵性能;n0,n1,n2,n3为Norrbin系数,当无人艇具有对称结构时,n0=n2≈0,当无人艇具有直行特性时,n1=1,否则n1=-1。因此式(1)可简化为

(3)
当n3=0时,式(3)即为Nomoto模型
(4)
2 分步实艇数据处理的辨识算法
由于辨识技术的固有缺陷,当同时辨识的参数较多时,存在所谓的“参数相消效应”,即所辨识参数同时偏离各自真值。为克服这个缺陷,本文通过设计不同的试验,分步辨识各参数,确保所辨识参数的准确性。方法步骤如下所述。


(5)

(6)

(7)
最小二乘拟合误差为

(8)

(9)
由式(9)可得a0和a1,故可求得K和δr。
Step2 将辨识得到的K和δr视作已知量,利用Z10°/10°试验结果对K-T线性模型进行最小二乘辨识,得到T。首先将式(4)进行前向差分处理,各阶前向差分格式为
(10)
(11)
(12)
(13)
式中:ψ(k)为k时刻艏向角的采样值;δ(k)为k时刻舵角的采样值;h为采样间隔。则对式(4)采用前向差分格式离散化得
T[y(k+2)-y(k+1)]=Kh2[δ(k)+δr]-hy(k+1)
(14)
式中,y(k+1)=ψ(k+1)-ψ(k)。
取k=1,2,3,…,M-2,M为采样总数,令
(15)
(16)
得到TY=A,因此T的最小二乘解为T=(YTY)-1·(YTA),YT为Y的转置。
Step3 将K,T和δr视作已知量,利用Z20°/20°试验对非线性模型(3)进行最小二乘辨识,得到n3。此时由于运动幅度大,非线性严重,n3属于敏感系数,因而有较高的辨识精度[8]。首先将式(3)采用前向差分格式离散化得

(17)
式中,y(k+1)=ψ(k+1)-ψ(k)。
取k=1,2,3,…,M-2,M为采样总数,令

(18)
(19)
则可得到αQ=C,则α的最小二乘解为α=(QTQ)-1·(QTC),QT为Q的转置。
Step4 利用Z15°/15° 的操舵响应试验,通过实艇试验数据和所辨识出的模型仿真结果对比,验证了所辨识模型的正确性。
3 辨识结果与分析
首先在一级海况下进行δ=5° 定常回转试验,舵角和航速分别稳定在5° 和10 kn(1 kn=1.852 km/h)左右,采样时间间隔为0.5 s。由于记录的数据较多,只列出回转试验的部分采样点数据,如表1所示。对应舵角与艏向角的关系如图1所示,由Step1辨识得K=0.560 0,δr=0.008 2°。

表1 5°回转实验数据

图1 对应艏向角与舵角的关系Fig.1 Correspondence between the heading angle and the rudder angle
在相同的海况和航速下,进行无人艇Z10°/10°操舵试验,由于各种干扰的存在和无人艇本身的机械特性,试验中允许目标舵角和实际舵角存在一定的偏差。部分Z10°/10°试验数据如表2所示。由Z形试验得到的舵角和艏向角之间的关系如图2所示。由Step2计算可得T=0.530 8。

表2 Z10°/10°试验数据

图2 实艇Z10°/10°试验结果Fig.2 The result of Z10°/10° experiment
同理,在相同的海况和航速下,进行无人艇 Z20°/20°操舵试验,部分Z20°/20°试验数据如表3所示。由Z形试验得到的舵角和艏向角之间的关系如图3所示。由Step3计算可得n3=0.001 7。
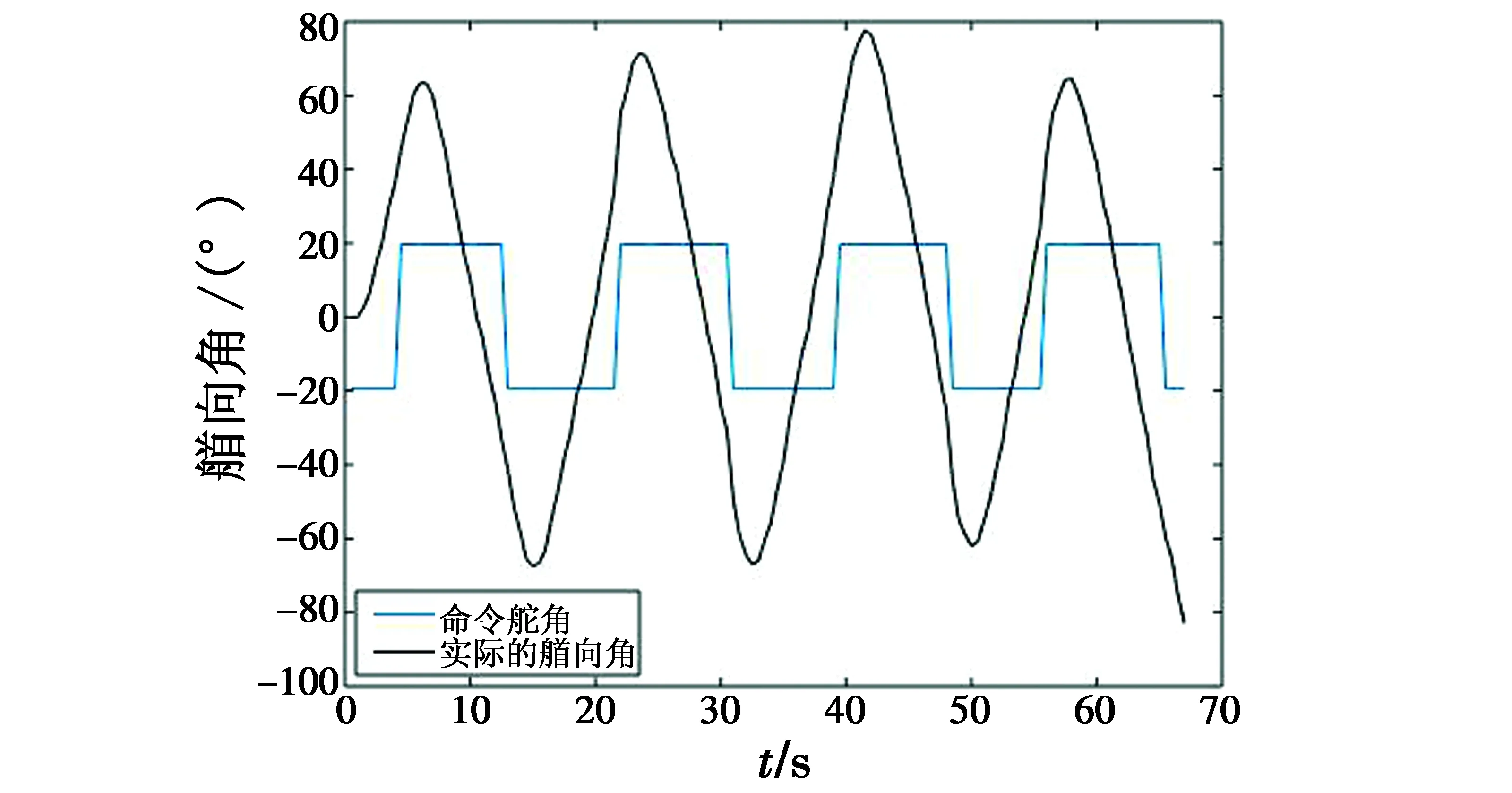
图3 实艇Z20°/20°试验结果Fig.3 The result of Z20°/20° experiment
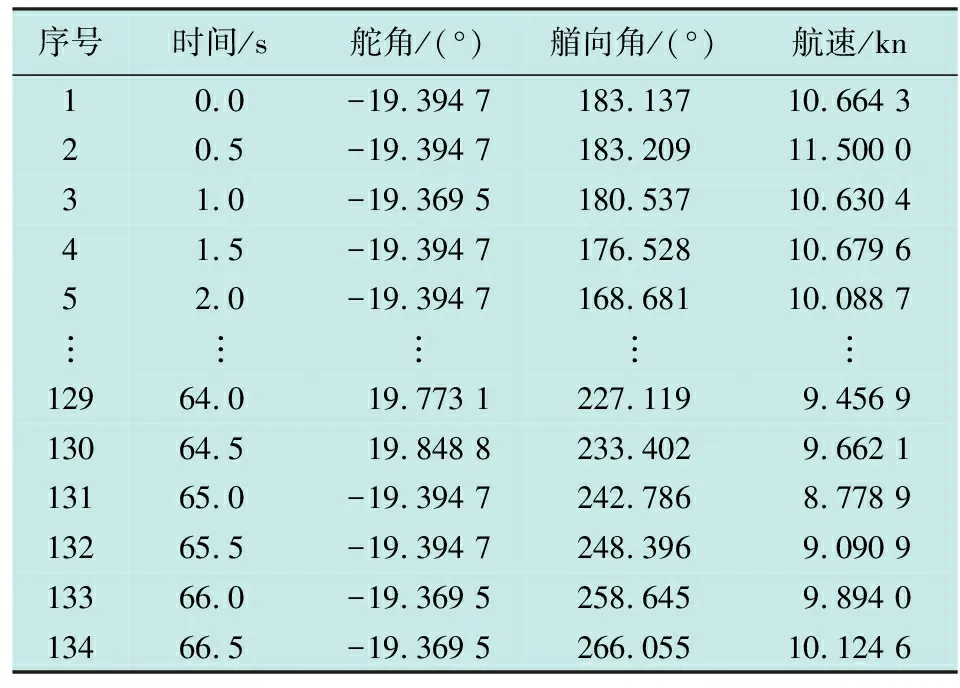
序号时间/s舵角/(°)艏向角/(°)航速/kn10.0-19.394 7183.13710.664 320.5-19.394 7183.20911.500 031.0-19.369 5180.53710.630 441.5-19.394 7176.52810.679 652.0-19.394 7168.68110.088 7︙︙︙︙︙12964.019.773 1227.1199.456 913064.519.848 8233.4029.662 113165.0-19.394 7242.7868.778 913265.5-19.394 7248.3969.090 913366.0-19.369 5258.6459.894 013466.5-19.369 5266.05510.124 6
利用参数辨识结果建立对应的一阶非线性响应模型进行Z15°/15°仿真试验,并利用实艇进行Z15°/15°操纵性试验,得到相应的艏向角预报曲线和实艇操舵响应试验的拟合曲线,如图4所示。可以看出,模型输出与实际输出性能大体一致,由于实际试验中的一些干扰等外在因素使得模型输出不能和实际情况完全一致,但模型基本上可以满足要求。

图4 Z15°/15°试验与仿真结果对比Fig.4 The comparison of Z15°/15°experiment result with simulation result
4 结束语
为解决无人艇操纵模型参数辨识过程中存在的“参数相消效应”,提出了一种基于分步实艇数据处理的模型参数辨识算法,通过设计不同的试验,分步辨识各参数,确保参数辨识结果的准确性。最后,分别利用所辨识出的无人艇操纵模型和实艇进行操舵预报仿真试验及湖上试验,通过实艇试验数据和仿真结果对比,验证了所辨识模型的正确性。下一步,将研究风、浪、流等外界不确定干扰下的无人艇模型参数估计及校正问题。
