AGV叉车在仓储行业的应用
2018-08-17陈宝强蒋旭东侯敬波
文/陈宝强 蒋旭东 侯敬波
一、引言
AGV是自动导航运输车(Automatic Guided Vehicle)的英文缩写。根据美国物流协会定义,AGV是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,同时还具有自动编程,安全保护和各种移载功能的运输设备,AGV是现代物流系统的关键设备之一。
自动引导车系统(AGVS-Automatic Guided Vehicle System)是由多台AGV组成,集机电控制,计算机网络及无线通讯等技术于一体的集成化智能运输系统。AGVS可用于各行各业自动化生产、储运、办公、服务等系统中执行室内物料运输任务,其中汽车生产、机械制造及电子工业方面的应用占较大比例,其它较多的应用部门分别为造纸、化工、视频、纺织等行业。
在汽车制造业中,AGVS常用于装配生产线,以增加传输的柔性,如发动机或底盘的装配线、车身机器人焊接线等。
在机械加工或综合作业的柔性制造系统中,AGV系统在先进的仓储系统以及自动化工厂中的应用是很典型的。AGV系统也是当前国内外研究开发的高技术领域——计算机集成制造系统不可缺少的物流智能化设备。
AGV单机控制系统的核心技术不仅决定着系统的柔性,同时也影响着系统运行的各个方面性能。随着科学技术的不断发展,多种导引方式已应用到AGV中。
AGV按照导引方式有无导引路径分为固定路径导引和自由路径导引两类。固定路径导引是指在AGV的运行路径上设置导引用的信息媒介物,通过车体上的传感器检测出其信号从而得到导引的一种方式,如光学导引、电磁导引、磁带导引等。自由路径导引方式是指在AGV的控制器上存储着区域位置的尺寸坐标,通过识别车体当前方位,自主的决定行驶路径的一种导引方式,主要有惯性导引、激光导引、视觉导引等。
二、AGV车型分类
包括:负载式、轻载多向移动式、嵌入式、叉车式、牵引式、带特定工装/夹具
见下图:

负载式

轻载多向移动式

叉车式

嵌入式

牵引式

带特定工装/夹具
三、AGV体系构成
1.呼叫终端-呼叫处理-下发指令
2.监控终端-路径规划交通管理任务指派-对接上下层
3.车载终端-执行与反馈
四、AGV导航的分类及导航技术
1.AGV导航的分类
激光导航、自然导航、测距导航、磁钉导航、电磁导航、磁带导航、多类型导航
2.AGV导航技术
目前,最常用的AGV导航模式如下:
激光导航:该车辆通过测量角度以及距离人工地标(反射器)的距离来进行导航。
见下图:

磁钉导航:该车辆通过检测地面上的磁铁进行导航。一般用于托盘-货架、走廊与背驮式自动导引车。
见下图:
磁带导航:该车辆利用地面上的磁带进行导航,距离标志牌用于沿着磁带更新距离。一般用于托盘-货架、走廊与背驮式自动导引车。
自然导航:通过激光扫描周围的环境,与计算机系统中存储的环境地图进行匹配,从而确定车体的当前位置。
惯性导航:采用陀螺仪检测车辆的方位角以及离参考点的距离来确定当前位置,通过与给定路线的比较来控制AGV的行驶方向。常常会结合磁钉、激光导航。
综合不同导航方法,在任何时间或地点改变导航方向
一般应用于反射器视野有限的环境
如:托盘-货架卷纸仓库等
见下图:

AGV硬件系统
针对经常出现振动、粉尘、潮湿和温度变化的恶劣环境而设的硬件系统
包括:驱动器、车载控制器、显示器、编码器、光电传感器、导航传感器等。
见下图:

AGV软件系统
用途:管理AGV系统中的实际运输
包括:主机、车龄系统控制器、交通流量控制器、流量管理、车队管理、维修工具、车辆维护、车辆诊断、导航、负载处理、驱动控制、操作界面、设计管理平台、布局、应用等。
五、我国AGV叉车的应用及技术现状
在我国,AGV产品大量用于汽车零部件行业以及港口集装箱的堆垛,要实现在仓库中的取货或堆垛功能,就要把AGV的自动导航功能与传统叉车的起升、堆垛、前倾卸载等功能结合起来,这就是我们常说的AGV叉车。
AGV叉车基本上都是自由路径导引AGV,自由路径导引中以激光导引式AGV叉车为主。国内许多叉车企业也在研发AGV叉车,如上海汇聚科技有限公司,在常用AGV的基础上,开发出了AGV前移式叉车,以麦克纳姆轮为驱动轮的AGV叉车,大型的高铁车厢组装用AGV平台车等产品。
国内叉车企业对AGV技术还处在摸索的过程中,产品技术不是很成熟,对于想在短时间内,掌握这项技术还存在很大的难度,因此国内的部分叉车企业选择了与国际领先企业技术合作,建立战略同盟关系,例如国际上知名的Kollmorgen(科尔摩根)公司,把核心的AGV技术与传统的叉车结合起来,实现智能化仓库的储运功能,提高了仓库的储存效率,降低了人工成本。
但国内企业生产的AGV叉车由于缺少自主核心技术,要广泛用于智能化工厂,还有很长的路要走。
AGV重要的核心技术体现在以下四个方面:
1.AGV管理监控调度系统是AGV系统重要核心技术之一,应开发基于100台以上AGV的管理调度系统开发工作,开展人机交互技术、远程监控技术、远程故障诊断技术的专项研究,提高我国自主知识产权的软件开发水平,以适应国内近年来AGV的市场需求。
AGV调度控制系统是一个复杂的软、硬件系统,目前国内外中高端的AGV系统均有AGV调度控制系统。系统硬件一般由服务器、管理监控计算机、网络通信系统以及相关接口等组成;软件由相关的数据库管理系统、管理监控调度软件等组成。
2.AGV车载控制器是AGV控制系统(核心算法)的核心,研制基于嵌入式计算机系统的专用AGV车载控制器,取代以采用工控机或通用PLC作为主控单元的AGV车载控制器是未来的技术发展趋势,也是今后研发工作的重点。
3.供电技术:AGV的供电技术除了传统的供电电池外,以“物理线性放电”、充电效率高、使用寿命长为特点的超级电容在AGV上的应用开始发力。同时,无线供电技术得到发展,在国内虽然仍然处在实验室和使用阶段,但是,在国外已经得到应用且以德国企业为主。
4.AGV小车的核心部件,例如:电机、传感器等核心零部件多数采用国外进口产品,核心关键技术受制于人,也制约了国内AGV行业的发展。
六、AGV叉车的基本状况
目前国内外比较流行的AGV叉车的生产方式分为两种,一种是AGV叉车完全自制,另一种为普通叉车改造。
1.执行元件自制
执行元件自制就是AGV叉车的主体结构部分包括车架、门架和工作装置等都是由AGV叉车生产企业根据AGV叉车的需要设计,需要机械工程师的配合,形成一体方案,对于自制AGV叉车车体即执行机构,由于国内AGV厂家的发展时间不长、国内高精机加配套不佳,导致AGV叉车在运行速度、精准度较差,在软件控制系统上的要求更高。欧洲AGV叉车执行元件基本上都采用自制,可以根据自己的技术、配重、客户的物料、工况做最佳的匹配。
2.执行元件由普通叉车改造
国内部分AGV叉车生产企业执行元件采用普通叉车,随着国内大型叉车企业与国际知名配套企业的合作,选用高精度的传感器和控制系统,实现了AGV的运行精度高,可靠性良好的效果。
七、AGV叉车车载控制系统
AGV车载控制系统主要完成AGV的导引、驱动转向控制、执行机构操作和安全防护等工作,因此车载控制系统的主要功能模块分为:AGV的定位模块、安全模块、通讯模块以及AGV的动作模块。

1.定位模块
通过反光胶贴定位,激光导航系统360°高精度地扫描周围环境轮廓信息(距离、角度及反光率)和反射胶贴位置数据。通过反射胶贴的测量数据自动计算出车辆的位置。见下图。


2.安全模块
安全装置是AGV最重要的组成部分之一。现代化的生产环境中,人与各种机械设施处于同一环境中,AGV作为一种运动中的动作功能机械,其安全保障功能尤为重要。安全装置可以防止设备在运行中出错,除了保护AGV自身安全、维护AGV功能的顺利完成外,还在最大可能的范围内保护和运行环境设施的安全。
安全防护:障碍物接近检测装置和接触检测装置
①接触检测装置:采用机械防撞围栏或者安全防撞触边。见右图。
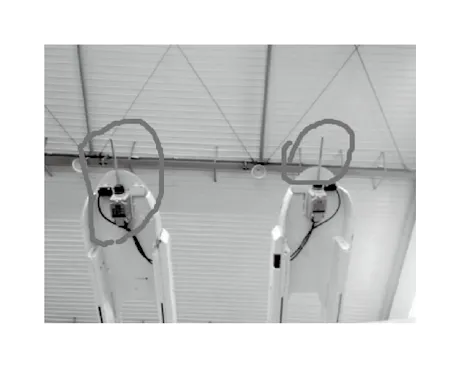
②障碍物接近检测装置:采用激光扫描,扫射距离4m,扫描范围270°的平面区域,最小检测物体:直径30mm,40mm,50mm可以进行设置。见下页图。
3.通讯模块
通讯模块是AGV和上位控制机交换信息和命令的桥梁。由于无线通讯具有不受障碍物阻挡的特点,一般采用上位机和AGV之间采用无线通讯。目前AGV中用的无线通讯主要有无线局域网和无线数传模块两种方式。但是由于无线数传模块不支持全双工模式,且输入和输出切换等待时间较长,模块的传输速率低,因此通常的AGV与上位机的通讯采用无线局域网的模式。
无线局域网由无线网和无线路由器组成,简单地说,WLAN就是指不需要网线就可以通过无线方式发送和接收数据的局域网,只通过安装无线路由器,在AGV车载机上安装无线网卡就可以实现车载机与上位机之间的无线连接。无线局域网具有支持全双工模式、安装便捷、组网灵活、传输速率高、易于扩展和高移动性的优点,因此通常的适用于AGV的通讯模块。
4.动作模块
AGV的动作模块包括驱动转向以及物料的移载。驱动系统是AGV车载控制系统中一个关键的子系统。它直接决定了AGV的运动性能。通常AGV的驱动转向有中间轮驱动差速转向、前轮驱动转向和前后轮驱动转向这三种方法。



驱动转向系统主要由驱动控制单元、电机、减速器和车轮组成。驱动转向系统按照有无反馈环节可分为开环控制和闭环控制两类。由于开环驱动系统没有反馈检查环节,所有精度低,通常都采用闭环驱动系统。
5.工作装置检查模块
对于AGV叉车,由于工作方式与其他的载货类的AGV车辆的不同,AGV叉车的工作是通过货叉装卸货物的,因此AGV在货物堆放点,准确安全的叉举货物的环节是至关重要的。由于AGV叉车货叉未能够精准的叉装到货物托盘将货物顶翻,或者是货叉未叉装到货叉根部,在货物起升过程中,货物就会倾翻,造成重大安全生产事故,因此工作装置的检查模块对于AGV叉车是至关重要的。
工作装置检查模块可以简单地分为几个装置:货叉前端的插孔检测、叉齿末端货物到位检测、货物防护检测和起升高度检测(旋转编码器)等。
(1)叉齿前端的插孔检测
(2)叉齿末端货物到位检测

(3)货物防护(小型光电开关传感器:精度40~300mm):叉齿前端安装上照防护红外和叉齿前端安装下照防护红外,保障货物的完全卸下以及叉齿下面是否有异物。

(4)起升高度检测:旋转编码器

小结
AGV叉车是机械化、电子化、智能化和信息化的产物,是智能化工厂和仓库的重要组成部分。近年来仓储叉车保持着高速的增长,2016年仓储叉车同比增长在20%左右,仓储叉车保持高增长速度的同时,对仓储叉车智能化的需求也是越来越高,智能物流仓储需要智能化的AGV车辆来搭建,提高物流效率,提高物流的准确率。
国内部分企业也在积极搭建自身的AGV车辆体系,满足不同客户的需求,但是依然存在起步晚、没有核心技术和产品性能不稳定等诸多问题。
本文对AGV叉车的基本构成、软件系统、硬件系统进行了分析,相信随着我国工业产品智能化水平的提高,AGV叉车一定会突破原有AGV的功能局限性,更广泛地应用于物流和仓储领域,提高仓储行业运行效率和技术水平。
