塔机回转机构变频调速控制研究
2018-08-16刘帝芳
刘帝芳
(陕西建设机械股份有限公司,陕西 西安 710200)
作为回转类型塔机的主要工作机构之一,回转机构是使塔机的回转部分在水平面内绕回转中心线转动的机构。回转机构的作用是实现货物的水平移动,通过起升、变幅和回转3个机构的配合动作,可以将货物运送到塔机工作幅度范围内的任意位置。加速传动齿轮的磨损,造成齿轮间打滑;若回转齿轮副侧隙过小,则增大了回转机构的传动扭矩,当传动扭矩超过回转机构的额定载荷时,就会致使塔机回转电机断轴。
2 塔机回转电机变频调速驱动控制
1 塔机回转机构组成
回转机构通常由回转支承装置和回转驱动装置两部分组成。回转支承装置用来连接起重机的回转部分与非回转部分,并提供回转运动所要求的约束以保证回转部分具有确定的运动,同时为回转部分提供稳固的支承,承受来自回转部分的垂直载荷、水平载荷以及倾覆力矩;回转驱动装置则用来驱动回转部分相对于非回转部分实现回转运动。
一般来说,回转机构驱动装置主要由以下3部分组成:
主动机,如电力驱动中的电动机;传动装置主要包括减速、换向和制动装置等;多个回转小齿轮与回转支承装置上的大齿圈啮合传动,以实现回转部分作回转运动。
目前我国塔机回转机构普遍采用电机—液力偶合器—回转减速器—回转支承的结构形式。塔机回转机构的最后一级传动都是齿轮传动,回转小齿轮与回转支承装置上的大齿圈啮合传动,以实现回转部分作回转运动。但如果回转小齿轮出力不均会目前大型塔机上回转电机大都采用变频调速或者使用绕线转子异步电动机,以降低回转启动速度,减小塔机回转启动力矩。
2.1 一对多驱动控制(1个变频器控制3个电机)
在使用变频调速的控制系统中,通常用1个变频器控制3个异步电机来驱动塔机回转机构。具体结构如图1所示。
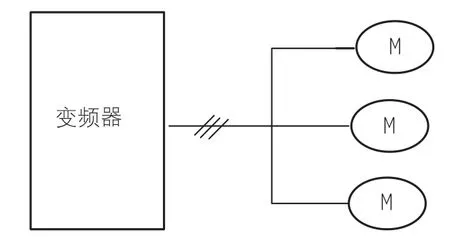
图1 一对多驱动控制
变频器采用V/F控制方式,输出的PWM信号同时控制3个电机,电机驱动各自连接的小齿轮。这种方式是开环控制,但由于电机特性和机械连接的不一致,可能会导致3个电机的负载不均衡,甚至出现一个电机过载运行,另一个电机轻载运行的情况。所以在这种驱动方式下,一定要安装极限力矩限制器,防止电机过载。或者有些工况选择在这种驱动控制方式下用力矩电机替换异步电机。
(1)极限力矩限制器。
为了保证回转机械可靠工作和防止回转驱动装置过载,保护电机、金属机构及传动零部件免遭破坏。在传动系统中一般还需装设极限力矩限制器。极限力矩限制器在正常工作时,蜗杆的转矩通过涡轮的圆锥形摩擦盘与上锥形摩擦盘间的摩擦力矩传给小齿轮轴,带动小齿轮转动;当需要传动的转矩超过极限力矩联轴所能承受的转矩时,上下2个锥形摩擦盘间开始打滑,以此来限制所要传递的转矩,起到安全保护作用。
(2)力矩电机[2]。
交流力矩电机是一种用交流电压信号控制的力矩电动机,可以长期工作在低速或堵转状态,力矩电机的轴以恒力矩输出动力。因为力矩电动机转子电阻比异步电动机转子电阻大得多,所示相对来说力矩电动机转差频率大,特性比较软。在一对多驱动控制中,若某个电机过载,其转速会自动下降来调整3个电机之间负载均衡。
2.2 一对一驱动控制(1个变频器控制1台电机)
为了改进一对多驱动控制的弊端,文章提出一对一驱动控制方式,即1个变频器控制1台电机,每台电机的输出特性都可控。若每台变频器都是V/F控制,每台电机的输出特性不一致,仍然会出现负载不均衡的情况。所以在一对一驱动控制中,变频器必须采用特殊控制方式。
(1)主从控制。
主从控制就是1台变频器采用开环矢量速度控制做为主机,另2台变频器采用转矩控制为从机,从机变频器接收主机变频器的输出转矩做为转矩控制的给定,保证3台电机输出转矩一致,出力均衡[3]。具体结构如图2所示。
在主从控制中,变频器采用开环矢量控制。主机为速度反馈(估算速度)控制,算法中必须有速度环PI控制,其输出作为转矩的给定值。而从机为外部转矩给定控制,在转矩来源选择中选外部给定转矩(将主机的输出转矩通过模拟量传输给从机),即从机算法中没有速度环PI控制。所以从机输出转矩完全跟随主机,这样就能保证3台电机负载均衡。其具体原理框图如图3所示。

图2 主从控制方式
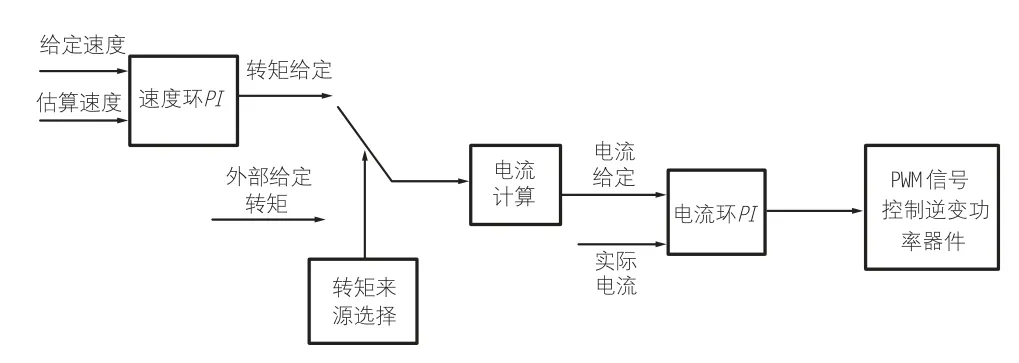
图3 主从控制原理框图
(2)DROOP控制。
当多台电机刚性连接驱动一个负载时,为了在电机之间取得负载平衡,可以使用DROOP控制。其原理就是在负载转矩过高时使电机减速,负载转矩过低时使电机加速,从而保持负载平衡。3台变频器都采用开环矢量速度控制,同时都能使用DROOP控制。具体框图如图4所示。
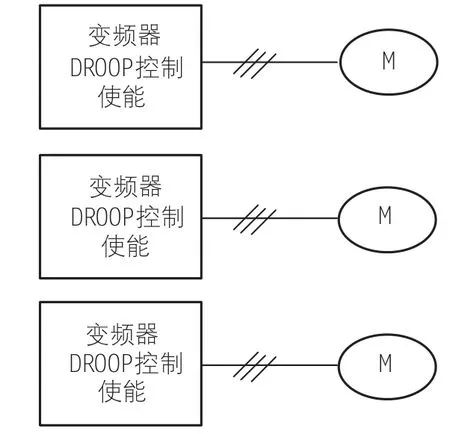
图4 DROOP控制方式
在DROOP控制中,3台变频器都采用开环矢量速度控制,即3台变频器算法中都有速度环PI控制。而DROOP控制将接收到的手柄速度给定信号经过算法后做为速度环中的给定速度。DROOP控制的原理如图5所示。DROOP算法为给定速度减去负载转矩乘以DROOP系数。输出负载转矩大,则速度给定减小,即电机减速;输出负载转矩小,则速度给定增大,即电机加速,从而平衡3个电机之间的负载。DROOP系数为零,则不能使用DROOP控制。
3 结束语
自动化产品在塔机行业的应用已经得到认同,未来5年内需求将会保持高速增长。如今变频调速技术已广泛应用于塔机[1],而如何选择更优的驱动控制方式来保证塔机工作的稳定、安全,将是必须考虑的问题。

图5 DROOP控制原理
