基于智能控制的可调间歇性振荡电源控制系统设计及仿真研究
2018-08-14姜东东张海宁杜延辉路振宇
姜东东,崔 敏,张海宁,杜延辉,路振宇
(1.许继集团有限公司,河南 许昌 461000;2.辽宁清河发电有限责任公司,辽宁 铁岭 112003)
0 引 言
可调间歇性振荡电源是一种特殊的开关电源,具有极小的纹波系数、较快的动态响应速度及间歇性振荡的瞬时高压等优点。该电源控制系统采用BP神经网络与PID复合控制算法控制策略,有利于解决常规电源动态响应速度慢的问题,实现对可调间歇性振荡电源更好的控制效果[1-2]。
1 Boost开关变换器的数学模型建立
本文选用Boost开关变换器作为研究对象,采用状态空间平均法对其进行建模与仿真研究。
Boost变换器的电路拓扑图如图1所示。它的主拓扑结构由电感器L、滤波电容器C、开关管Q、二极管VD和负载R构成。
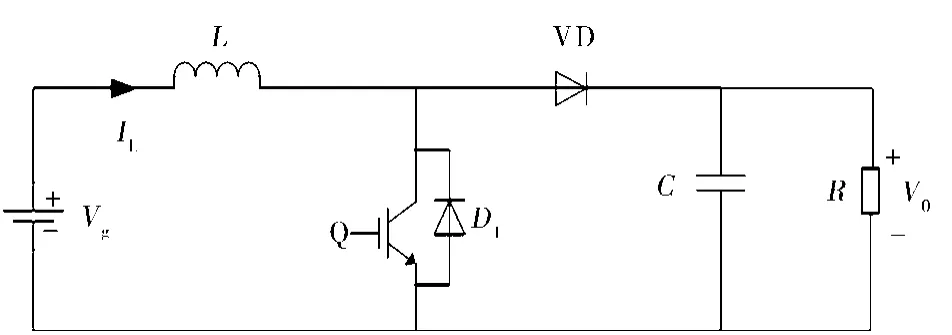
图1 Boost开关变换器拓扑结构
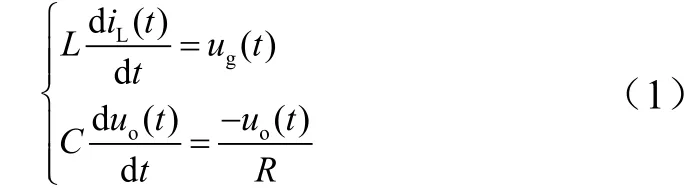
当t处于0~dTs期间(Ts为开关周期),开关管Q处于导通状态,二极管VD处于截止状态,电源电压Vg为电感L储存能量,负载R由电容C放电提供能量。由此,电路的状态方程为:
当t处于dTs~Ts期间,开关管Q处于关断状态,二极管VD因承受正电压而导通,电感L放电,电源和电感器共同为负载R供电,并为电容器C充电。状态方程如下(其中D'=1-D):

取式(1)和式(2)平均,可得矩阵方程:
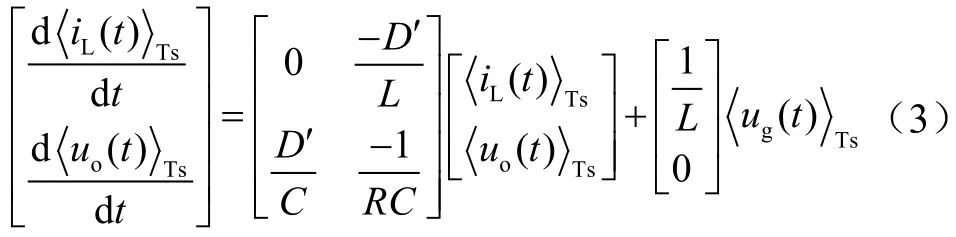
矩阵方程(3)引入小信号干扰后,去除二次项分量和稳态分量,得到交流小信号状态方程:

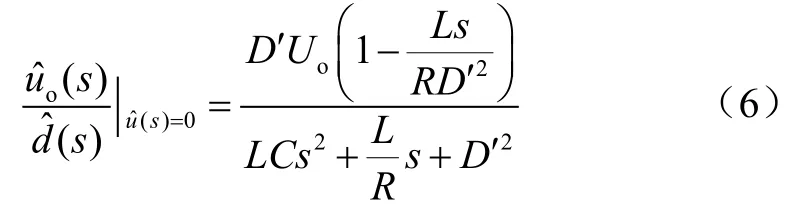
由状态方程(4),可以得出Boost变换器的传递函数为:

从而得到由控制到输出的传递函数为:
开关管导通时间Ton与开关周期Ts之比D称为占空比。因此,调节改变占空比D就可调节开关电源的输出电压,一般采用脉宽调制(PWM)方式实现占空比的调节。
2 BP神经网络与PID复合控制算法实现
本文设计的BP网络与PID复合控制算法结构框图及程序流程图,分别如图2、图3所示。该算法是基于Matlab/Simulink的S函数实现的,本文设计的S函数名为“nnbp_pid”。将该S函数与外围Simulink模型进行连接后,构建BP网络与PID复合控制器Simulink模型,如图4所示[3-5,7-8]。
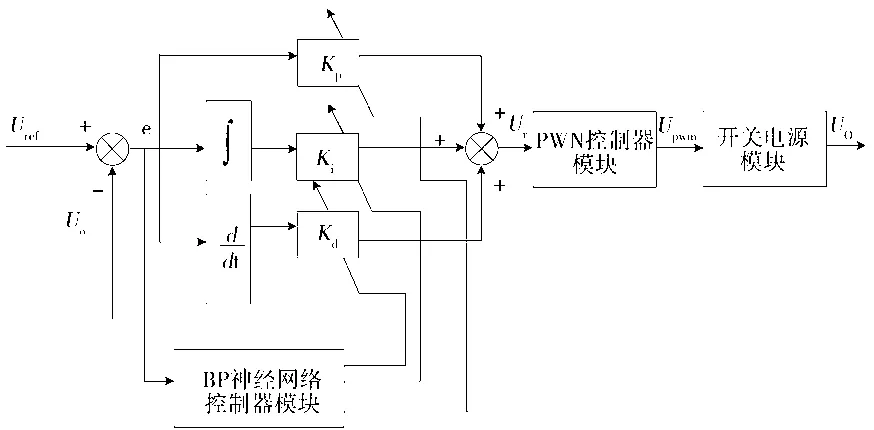
图2 BP神经网络与PID复合控制结构框图
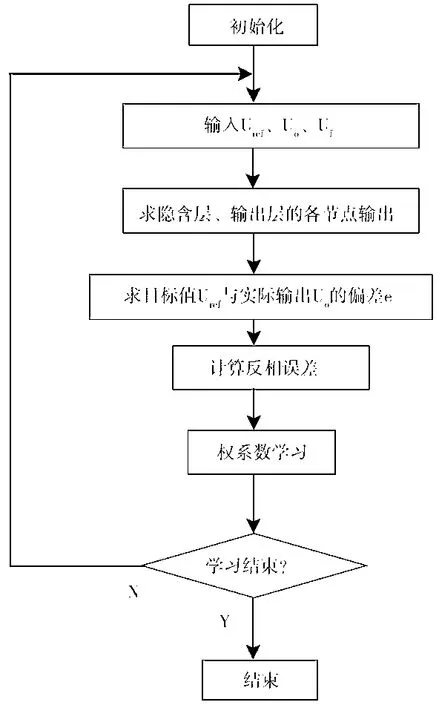
图3 BP神经网络与PID复合控制器程序流程图
3 可调间歇性振荡电源模型建立及仿真
3.1 可调间歇性振荡电源模型建立
为验证设计的BP神经网络与PID复合控制算法的可行性,基于Matlab/Simulink环境下搭建系统的仿真模型进行仿真验证分析[6]。

图4 BP神经网络与PID复合控制器Simulink模型
图4中的BP网络与PID复合控制器的Simulink模型经过封装、创建子系统等步骤后,得到如图5所示的“BP_NN_PID”控制器。然后,将此控制器与已经建好的Simulink模型相连接,得到如图5所示的基于BP神经网络与PID复合控制的开关电源Simulink模型(rin为参考电压信号)。
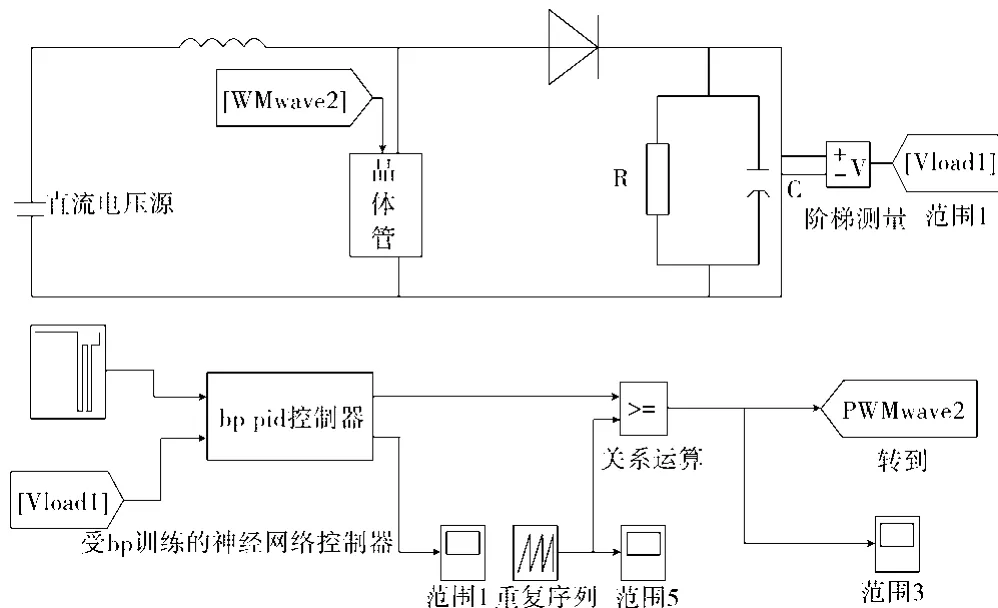
图5 基于BP神经网络与PID复合控制的开关电源Simulink模型
3.2 可调间歇性振荡电源振荡特性仿真及分析
本可调间歇性振荡电源用于生物医学领域的单细胞生化分析。生化分析即生物化学成分的分析。要想分析生物化学成分,必须采用电击法或者化学法将细胞膜破裂。
本文设计的脉冲振荡电压等级为-700 V到+700 V,如图6所示。
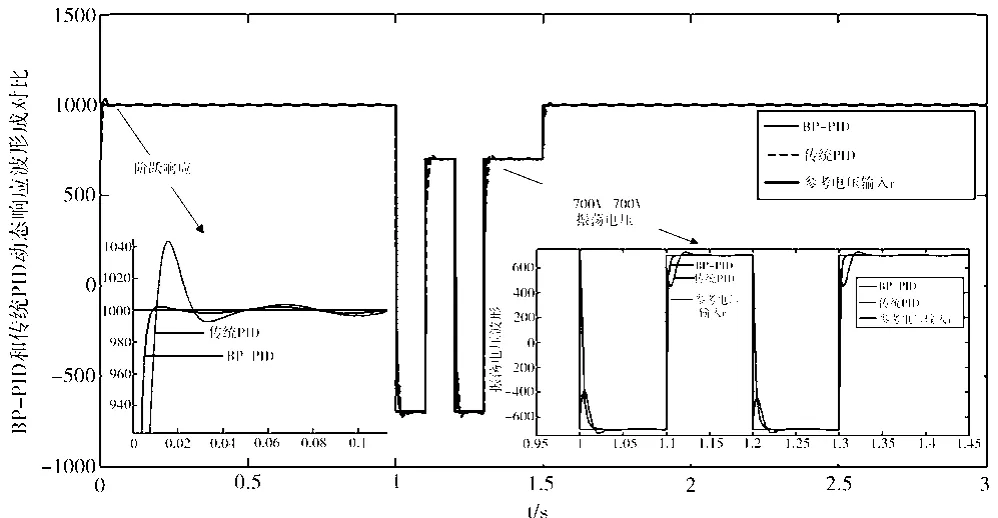
图6 BP神经网络PID和传统PID的阶跃响应仿真波形对比
3.3 可调间歇性振荡电源在负载和输入电压突变时仿真及分析
基于Matlab/Simulink分别对传统PID控制策略、BP神经网络PID复合控制策略两种控制策略进行仿真对比、分析。
图6是考虑纹波电压情形下的可调间歇性振荡电源两种控制策略模型的动态响应仿真波形。结果表明:BP神经网络与PID复合控制在响应速度明显比常规PID控制策略要快;与常规PID控制策略对比,具有较小超调量、较短超调时间的优点。
由于输入的直流电压含有频率为100 Hz、峰峰值为20 V的交流成分,图7中的仿真波形表明:BPPID控制后的纹波峰峰值为4 V,传统PID控制后的纹波峰峰值为7 V,从而得出BP神经网络与PID复合控制下的输出电压的纹波系数小,具有良好的纹波抑制效果。
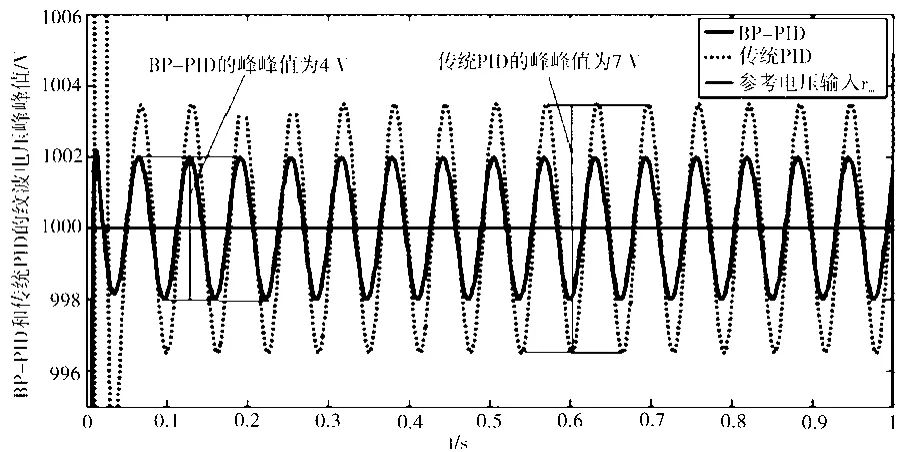
图7 BP神经网络PID和传统PID的纹波电压对比
如图8所示,在2.5 s时,对本振荡电源系统加入一个320 V的扰动信号,改变电源系统的输入电压。仿真结果显示,基于BP神经网络PID复合控制的电源系统的恢复时间约为0.01 s,基于常规PID控制策略的电源系统的恢复时间约为0.04 s。仿真表明:基于BP神经网络与PID复合控制的可调间歇性振荡电源系统,在抵御外界扰动的能力上具有动态响应速度快且震荡幅度小的特点,满足可调间歇性振荡电源系统动态响应速度快的性能要求。
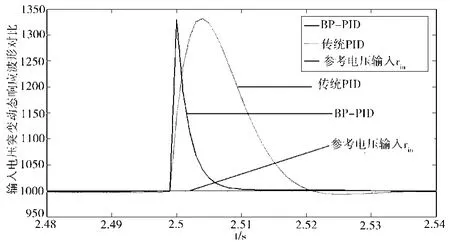
图8 输入电压突变动态响应仿真波形
如图9所示,在t=2 s时改变负载大小到原来的82%。仿真结果显示:基于BP神经网络PID复合控制的振荡电源系统的恢复时间约为0.01 s,基于常规PID控制策略的振荡电源系统的恢复时间约为0.04 s。仿真表明:基于BP神经网络与PID复合控制的可调间歇性振荡电源系统,在抵御负载突变的能力上具有动态响应速度快且震荡小,满足可调间歇性振荡电源系统动态响应速度快的性能要求。
通过对以上BP神经网络与PID复合控制和传统的PID控制策略的仿真结果对比,基于BP神经网络与PID复合控制策略的振荡电源系统具有动态响应速度快、超调量小、调节时间短、纹波系数小和抗干扰能力强等优点[6]。

图9 负载突变动态响应仿真波形
4 结 论
本文提出的基于BP神经网络与PID复合控制的可调间歇性振荡电源仿真系统,具有动态响应速度快、抗干扰能力强、纹波系数小、可产生可调间歇性振荡的瞬时高压等优点。通过MATLAB仿真分析,验证了BP神经网络与PID复合控制策略的可行性。
