一种改进自适应增量Kalman滤波的传递对准算法
2018-08-11徐英蛟
徐英蛟
(中国人民解放军91851部队,辽宁 葫芦岛 125000)
传递对准匹配和滤波方法是研究和提升传递对准效果的核心技术[1]。只采用单一参数匹配时,传递对准往往受诸多条件约束,如仅采用速度参数作为匹配量虽然可实现快速对准,然而要求载体做蛇形机动,这对舰船机动的机动性能提出了很高的要求[2]。因此,基于多种参数组合的传递对准算法,如“速度+姿态”、“速度+角速度”、“速度+位置”等匹配方法成为了舰载武器惯导系统传递对准的研究发展方向。
DGPS系统精度高,误差不随时间累积,且其量测值为白噪声。将DGPS系统的速度、位置作为传递对准算法高精度的主惯导匹配量十分理想。然而,速度和位置参数均不包含载体角运动信息,要实现快速对准,只能增强载体线性机动运动,提高系统状态可观测性[3]。否则,将无法准确估计航向失准角。因此,仅仅采用DGPS速度、位置匹配方法不适用于舰船等机动特性差的运载体[4]。“线运动+角运动”参数匹配方式可有效提高系统可观性,仅需舰船摇摆运动即可实现对准,可消除对载体机动能力要求较高这一制约条件。舰船主惯导系统可提供高精度的姿态信息,可将其输出的姿态参数与DGPS系统输出的速度、位置参数组合,构造“线运动+角运动”匹配的传递对准算法。
Kalman滤波利用系统的数学模型,建立状态方程和量测方程,通过递推解算达到求解状态量的目的[5]。然而受统计特性不确定的系统噪声和量测噪声干扰,常规Kalman滤波估计精度很难满足要求,甚至会导致滤波器发散。自适应Kalman滤波(AKF)能够很好地解决上述问题[6-10]。然而,在工程实际中,由于舰船挠曲变形、惯性器件误差累积、建模不精确及参数选取不当等原因,往往将系统误差引入量测方程中,这极大地降低了滤波器性能,甚至导致发散。增量Kalman滤波通过选取相邻两个时刻的量测量之差ΔZk作为量测量,从而消除系统误差。
基于此,本文选取“速度+位置+姿态”匹配方法进行传递对准,降低传递对准对舰船机动性的要求。在自适应滤波(AKF)和增量Kalman滤波(IKF)的基础上,进一步提出改进自适应增量Kalman滤波(AIKF)。总体设计方案如图1所示。该方法既能时时自适应估计噪声统计量,又能成功除去量测方程中的系统误差,从而使滤波器性能得到极大改善。
1 “速度+位置+姿态”匹配状态空间模型
1.1 捷联惯导动态误差方程
选取东北天地理坐标系为导航坐标系,φ为姿态误差,δV为速度误差,δP为位置误差。根据惯导系统误差传播特性,可推得舰载武器惯导系统的动态误差方程[11]。
姿态误差方程:

(1)
速度误差方程:
(2)
位置误差方程:
(3)
式中,δφ为纬度误差,δλ为经度误差,φ为惯导系统计算所得纬度,R为地球半径。
1.2 状态方程建立
综合考虑传递对准数学模型精度、计算量以及惯性器件误差特性,本文选取姿态误差、速度误差、位置误差、陀螺漂移、加速度计零偏13维状态为Kalman滤波器的状态量。
(4)
依据子惯导误差方程及状态变量,得传递对准状态方程为[12]
(5)
式中,
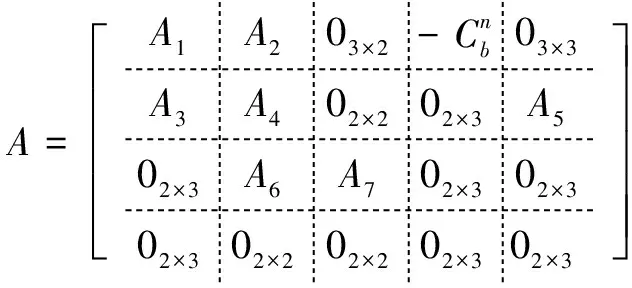
A=éëêêêêêA1A203×2-Cnb03×3 A3A402×202×3A5 02×3A6A702×302×3 02×302×202×202×302×3 ùûúúúúú
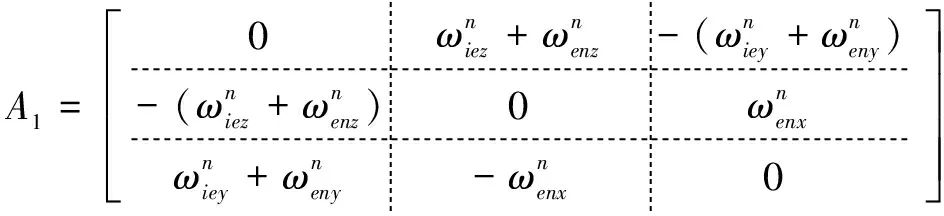
A1=éëêêêê0ωniez+ωnenz-(ωniey+ωneny) -(ωniez+ωnenz)0ωnenx ωniey+ωneny-ωnenx0 ùûúúúú
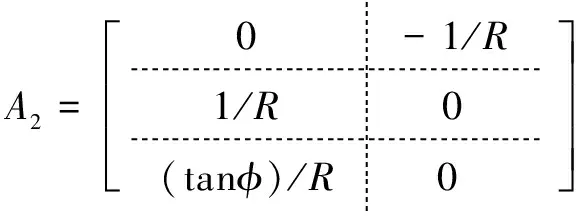
A2=éëêêê0-1/R 1/R0 (tanϕ)/R0 ùûúúú
A3=éëêê0-fnzfny fnz0-fnx ùûúú

A4=éëêê(Vytanϕ)/R2ωniez+ωnenz -(2ωniez+ωnenz)0 ùûúú
A5=éëêêCnb (1,1)Cnb (1,2)Cnb (1,3) Cnb (2,1)Cnb (2,2)Cnb (2,3) ùûúú
A6=éëêê01/R 1/(Rcosϕ)0 ùûúú

A7=éëêê00 (Vxtanφ)/(Rcosϕ)0 ùûúú
1.3 量测方程建立
为提高系统可观性,使舰船等机动性能弱的载体仅在摇摆状态下完成传递对准,引入舰船主惯导姿态信息辅助DGPS系统的速度、位置信息,观测方程为:
(6)
式中,
H=éëêêêê02×3I2×202×202×6 02×302×2I2×202×6 I3×303×203×203×6 ùûúúúú
2 改进自适应增量滤波算法
在传递对准过程中,舰船由于不可避免地受到海浪等各种干扰,这些干扰最终会在系统噪声中体现,加之惯性器件随机漂移所带来的系统噪声,这些系统噪声统计特性一般情况下都难以估计。构建如下增量量测方程:
ΔZk=Zk-Zk-1
(7)
当采样率较高时,通过量测值的差值,能够有效消除未知系统误差。自适应滤波算法可以在滤波的同时对未知或时变噪声统计特性进行估计或修正,且能充分利用可靠状态预报信息,以减小状态估计误差,提高估计精度[13]。舰船水平姿态量测信息与方位姿态量测信息所呈现的统计特性不同,如果采用单一自适应因子,部分量测信息得不到充分利用。故将自适应因子分为水平和方位姿态差两类,增大可靠量测信息的权重,降低不可靠量测信息所带来的影响,充分利用捷联惯导输出信息。
2.1 改进自适应增量滤波方程
将传递对准状态空间模型用泰勒级数展开,离散化后得到自适应增量滤波器的状态方程与量测方程为
(8)
系统噪声Wk与量测噪声Vk满足下式:
(9)
式中,Qk为对称非负定方差矩阵,Rk为对称正定方差矩阵,δkj为狄拉克函数。
因为ΔZk与ΔZk-1相互独立,因此自适应增量滤波方法可以通过递推解算得到。通过引入增量滤波原理,差掉了时变系统噪声干扰,因此本文仅对量测噪声自适应解算。
1)时间更新
(10)
式中,k=1,2,…,N,N为仿真总步长。
2)量测更新
(11)
式中,
(12)

(13)
3)量测噪声阵实时解算
(14)
式中,α为速度、位置差量测噪声对应的自适应因子。由于DGPS系统输出的速度、位置信息与滤波器预设统计特性高度符合,因此取值为1,不做自适应处理。β1、β2分别是水平及方位姿态差量测噪声所对应的自适应因子。
2.2 滤波器自适应因子设计
通过自适应因子设计,可以时时自适应调节滤波器预设的量测噪声协方差阵,令其更逼近实际量测噪声特性。由于水平姿态估计精度较高,故希望只引入高可信度部分,即误差辨别量小的信息[14],故选择指数函数表示的自适应因子β1,其表达式为
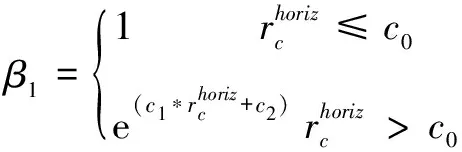
(15)
式中,c0、c1、c2均为常数。
相对于水平姿态信息,挠曲变形对方位姿态信息的影响较小,因此希望引入最大量的方位姿态信息,即误差辨别量相对较大信息,故自适应因子β2采用两段函数表示,其表达式为
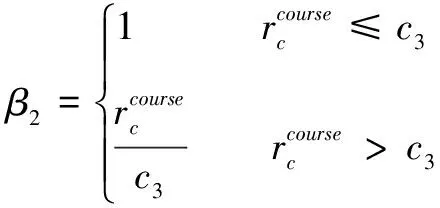
(16)
式中,c3为常数。
3 系统仿真与结果分析
在舰船仅处于“摇摆”运动状态下,对未引入姿态量测信息的“速度+位置”匹配法进行传递对准仿真,仿真曲线如图2所示。
由图2可知,在舰船仅处于“摇摆”状态下,仅采用线运动相关的姿态量测信息,难以完成对方位失准角的估计,且对横摇角及纵摇角的估计误差也较大。这是因为在舰船仅处于“摇摆”运动状态下,未引入角运动量测匹配信息,对姿态误差角的观测度较低,特别是航向误差角无法观测。
图3给出存在未知系统噪声与量测噪声的情况下,自适应滤波与自适应增量滤波两种滤波结果的比较。
由图3可知,当存在未知系统误差时,自适应增量Kalman滤波能够完成对子惯导姿态误差的准确估计,而自适应Kalman滤波估计精度较低。这是因为,采用自适应增量滤波算法,通过相邻时刻量测值作差,将未知的系统误差消除;另一方面,通过分类自适应因子的选取,达到时时自适应控制的目的,剔除可靠性差的信息对滤波精度的影响。
4 结束语
仿真结果表明,以主惯导姿态信息辅助DGPS系统速度、位置信息匹配法传递对准,能够提高系统的可观测性,大大降低传递对准对载体机动性的要求,在舰船仅“摇摆”状态下即可实现对子惯导系统快速初始对准;分类自适应增量Kalman滤波方法,既可以消除舰船挠曲变形、惯性器件误差累积、模型和参数的选取不当等因素造成的系统误差,又表现出较强的适应性,可以实时估计和修正量测噪声统计量,从而达到提高滤波精度的目的。
