基于武术飞脚动作学习的类人采摘机器人控制系统
2018-08-10任天麟
任天麟
(焦作大学,河南 焦作 454150)
0 引言
随着现代控制技术的发展,机器人被应用在很多重要的领域,近年来农业机器人发展快速,且随着技术的革新,机器人逐渐可以适应复杂环境下的作业。目前,采摘类作业机器人的数量逐渐增多,但其大部分采摘高度作业范围有限,能够适应不同高度需求作业的机器人还很少。武术的飞脚动作是武术学习中最常见的动作之一,其主要动作分为助跑、起跳、空中动作和落地过程,每个动作过程都可以作为机器人的仿生类人学习的模型。武术飞脚动作在起跳时,其肌肉的收缩和关节的动作具有明显的规律性,如果将其应用到采摘机器人的腿部设计中,可以使采摘机器人腿部具有不同高度的伸缩功能,从而满足不同高度采摘作业的需求,对于复杂采摘作业环境机器人的研究具有重要的意义。
1 武术飞脚动作分析机器在类人机器人动作控制中的应用
武术的飞脚动作具有一定的技巧性,助跑后踏跳动作完成质量的好坏直接影响到腾空高度,它是跳跃动作的重要环节。其正确方法是利用人体肌肉在被拉伸时具有的弹力,利用弹性收缩提高在腾空时的初始速度,通过这个力将跳跃时间延长,可使武术飞脚动作具有更长的作用时间,从而达到较高的高度。利用这一原理设计的擂台比赛机器人有很多,两款典型的擂台比赛机器人如图1所示。
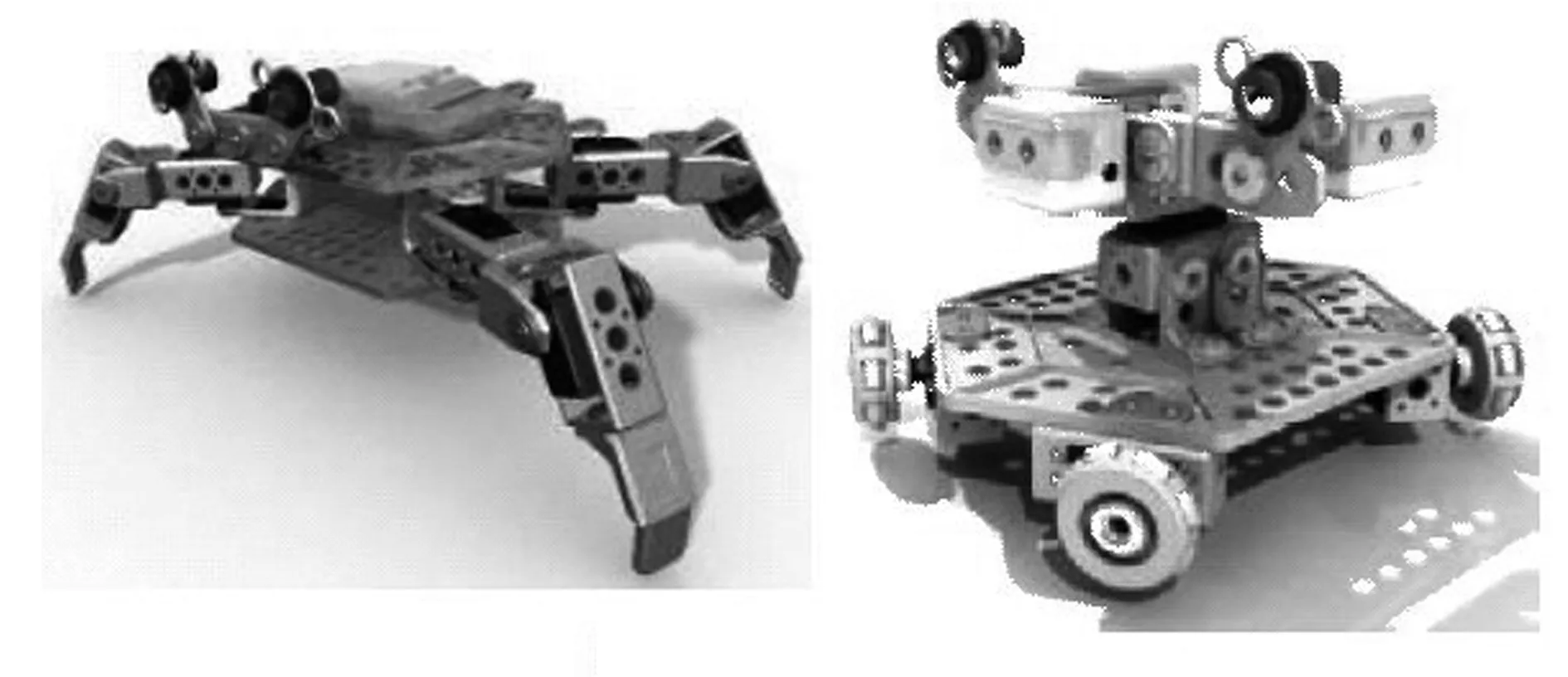
图1 武术擂台类人模仿机器人示意图Fig.1 The sketch diagram of humanoid robot of martial arts arena
该种型号的机器人主要是用于擂台比武等,其功能主要包括定位自己位置、检测敌人位置和实现攻击动作等。将飞脚动作使用在采摘机器人上,其流程如图2所示。采用武术飞脚动作可以实现采摘机器人的类人仿真功能,从而提高采摘机器人设计的灵活性,利用腿部的伸缩功能,可以实现更高处果实的采摘作业,提高机器人对复杂作业环境的适应能力。
2 采摘机器人调速方案及动作控制方案
速度控制设计是采摘机器人最主要的功能设计之一,本次调速方案主要选择的是PWM调速方式。根据设计手册,直流电机的转速可以表示为
(1)
其中,U为电机的电压;I为电机的电流;R为电机电路的电阻;Φ为电机线圈的磁通量;K为结构参数。由公式(1)可知,转速控制的方案主要有两种:一种是通过磁通量进行控制;另一种是对电压进行控制。由于磁通量的控制较为复杂,因此常用U的调速方案是对电压进行控制,而电压的控制可以通过脉宽调制来完成。其调速原理为
(2)

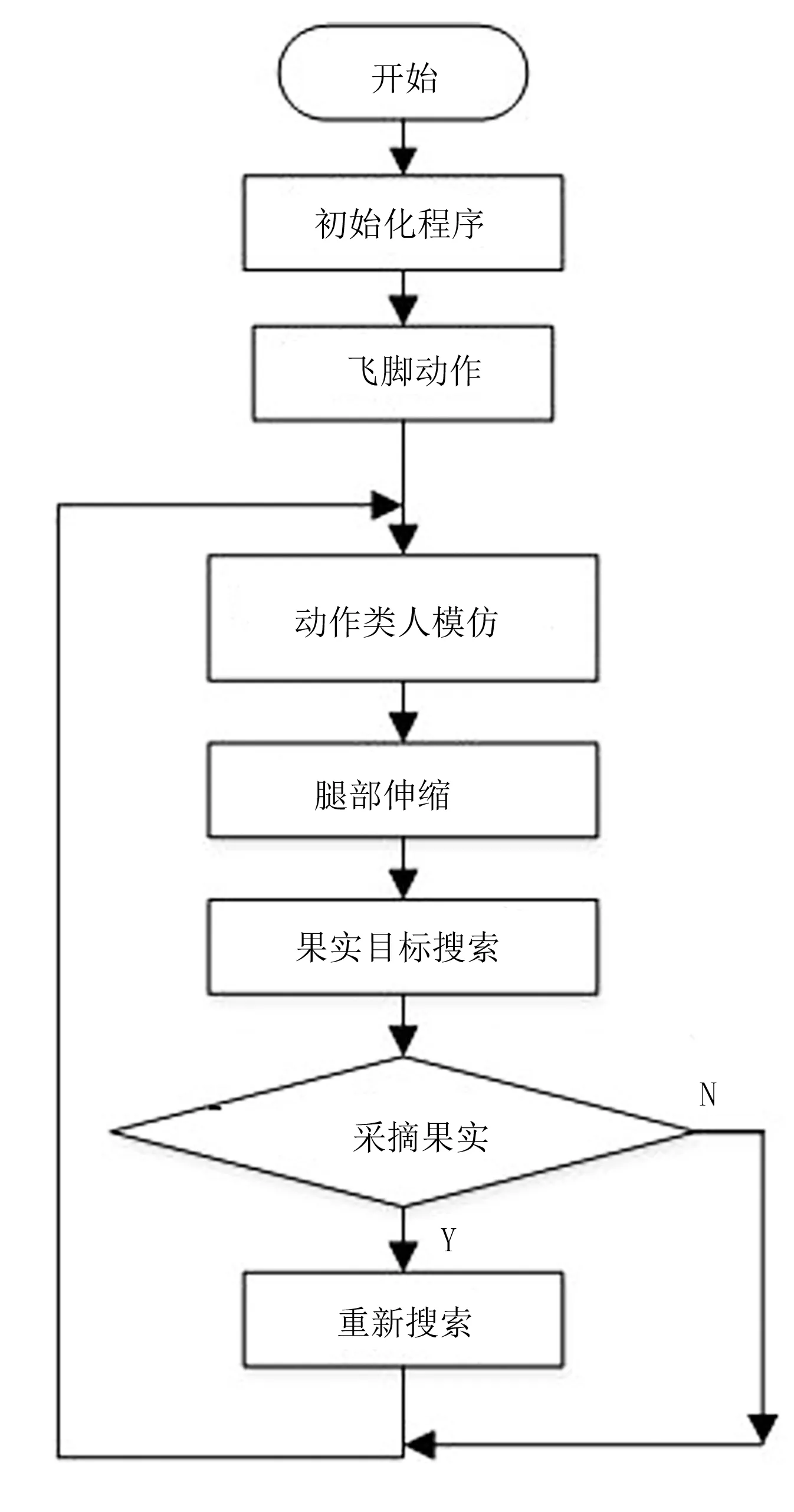
图2 类人模仿飞脚伸缩动作的流程示意图Fig.2 The flow chart of humanoid imitating the telescopic movement of flying feet
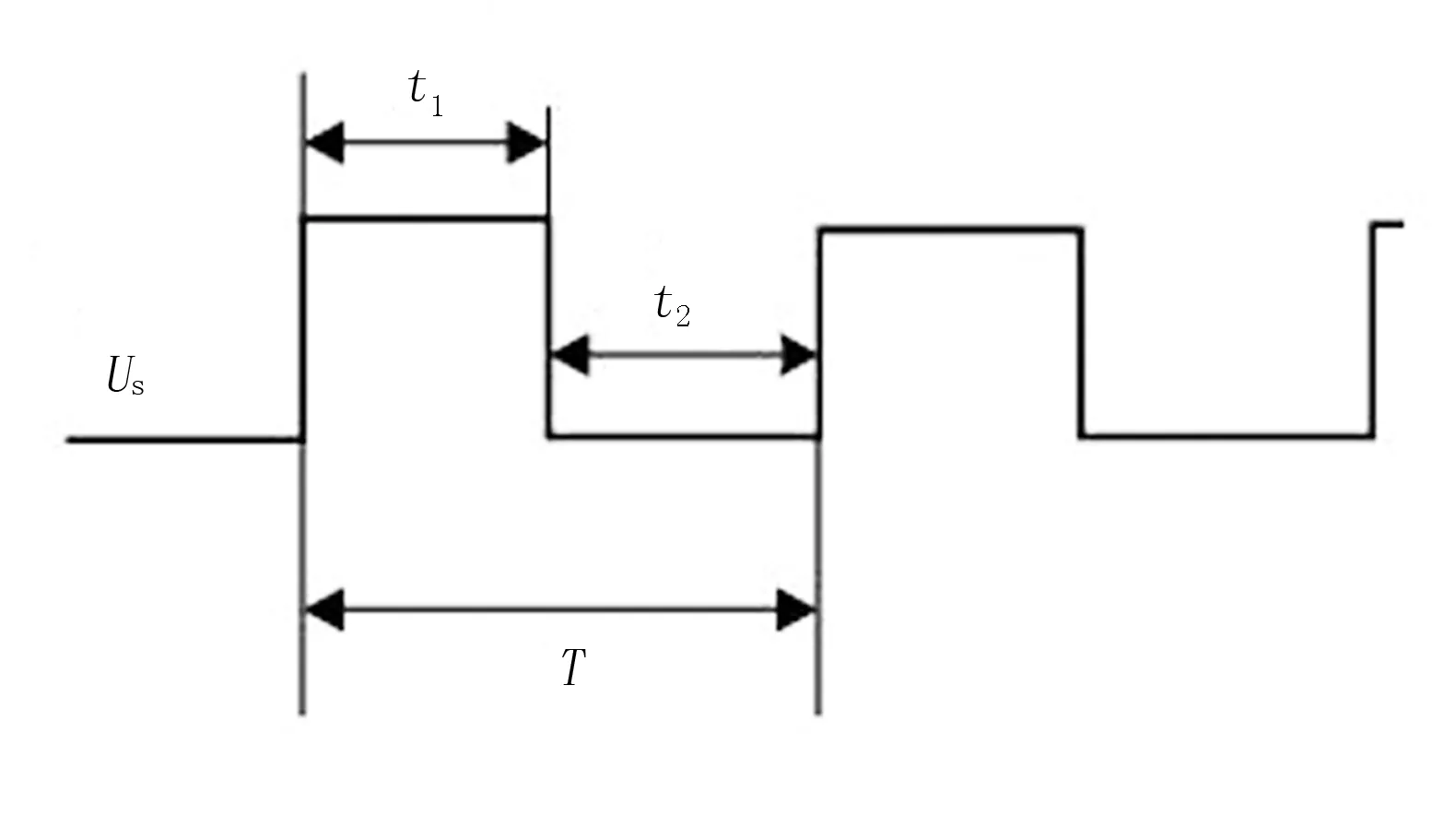
图3 PWM调速原理示意图Fig.3 The schematic diagram of PWM speed regulation principle
2.1 PWM调速方案选择
目前,主要有3种常用的方法可以改变占空比,包括定宽跳频、调高调频及定频调宽。
1)定宽调频法(见图3)。该方法主要是将t1设置为恒定不变值,改变t2值,使频率的周期发生变化。
2)调高调频法。该方法主要是将t1设置为恒定不变值,改变t2值,使频率和脉宽发生变化。
3)定频调宽法。这种方法是保持频率恒定,同时改变t1和t1的值,使电压发生改变。
这3种方法虽然都可以实现PWM调速,但如果频率发上变化的话,在频率接近于系统频率时,系统会产生较大程度的振荡,因此一般不使用前两种方法。本次也是选用第3种方法,即定频调宽法。
2.2 核心控制芯片选择
芯片的选择也有多种方案,下面对每个方案进行分析比较,确定本次设计使用方案。
1)第1种方案是选择STC89C52单片机作为核心控制器。这款单片机简单易懂,设计也方便;但该款单片机并没有AD转换和PWM输出等,所以没有采用这款单片机。
2)第2种方案是使用ARM系列的单片机。该型单片机功能非常强大,且处理速度快;但这款单片机的设计和编程较为复杂,而本研究只是采摘机器人腿部伸缩动作的初始化研究,没要考虑太复杂的控制。ARM系列单片机的设计和使用需要一定的专业水平才能完成设计,因此暂时没有考虑选择这款单片机。
3)第3种方案是选择STC12C5A60S2单片机。这款单片机可以完全兼容C51单片机,且处理速度也比较快,简单易懂,还内置了AD转换和PWM输出。因此,本研究选择了这款单片机作为核心控制器。
2.3 传感器方案选择
传感器的选择也有多种方案,包括很多方案的组合,本次主要介绍两种方案。
1)第1种方案是采用3种传感器的组合,包括红外接近传感器、灰度传感器和超声波测距传感器;不过超声波传感器的安装和编程设计较为复杂,本次研究没有选用这个方案。
2)第2种方案是采用红外接近传感器、红外测距传感器和灰度传感器组合。这个组合的硬件安装相对简单,软件编程也不复杂,可以满足设计要求。
图4为采摘机器人的硬件系统框图。其中,硬件电路主要包括复位电路、程序电路、检测电路和电源电路等,输出控制部分主要是电机驱动电路和舵机驱动电路。假设表示电机控制的高电平,l表示电机控制的低电平,x表示没有发出电平,则点击运行控制的逻辑表如表1所示。
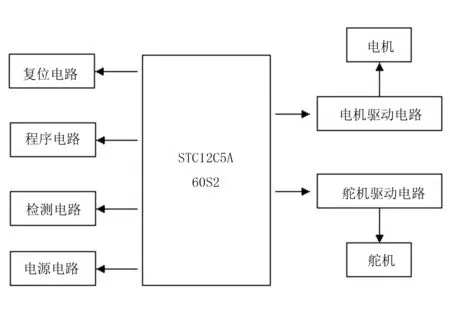
图4 采摘机器人的硬件系统框图Fig.4 The hardware system block diagram of picking robot
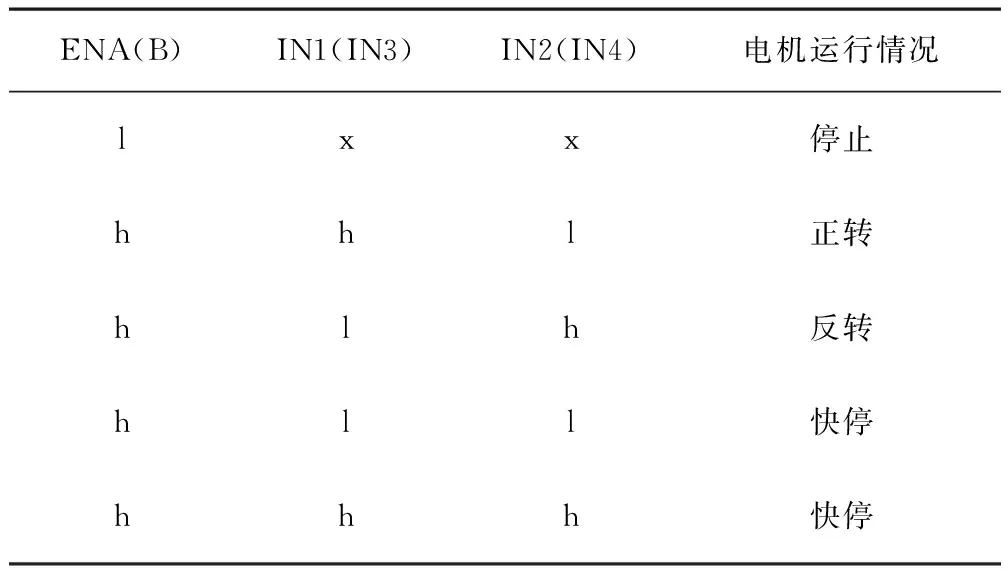
表1 电机运行控制逻辑表
通过控制输入端信号来控制直流电机的起停,通过单片机定时器来进行模拟PWM调速,并根据果实目标的高度要求,通过电机控制,实现采摘机器人腿部的伸缩动作,进行较高部位果实的采摘。
3 采摘机器人实验测试
为了验证武术飞脚动作在采摘机器人上使用的可行性,设计了一款基于武术飞脚动作的腿部可伸缩机器人。为了简化研究,本次只选用了武术飞脚动作的腿部伸缩作为类人仿生的主要对象,采用舵机控制的方式,通过调整舵机脉宽实现舵机的角度变化,从而实现采摘机器人腿部的伸缩动作。舵机的角度变化和输入脉冲信号的关系如图5所示。
采摘机器人要想实现腿部伸缩动作,需要调节关节处的电机,使舵机获得1个转动角度,可以改变对应的输入脉冲信号的占空比,并通过闭环反馈调节,使采摘机器人的位置处于最佳状态。
图6为基于武术飞脚动作设计的一款类人机器人。该机器人腿部关节处安装有驱动电机和舵机,通过电机驱动可以是舵机旋转成一定的较大,从而调整腿部的长短。由试验得到了如图7所示的各种类人模仿动作。

图5 舵机转动角度与输入脉冲信号关系图Fig.5 The relationship between rotation angle of actuator and input pulse signal
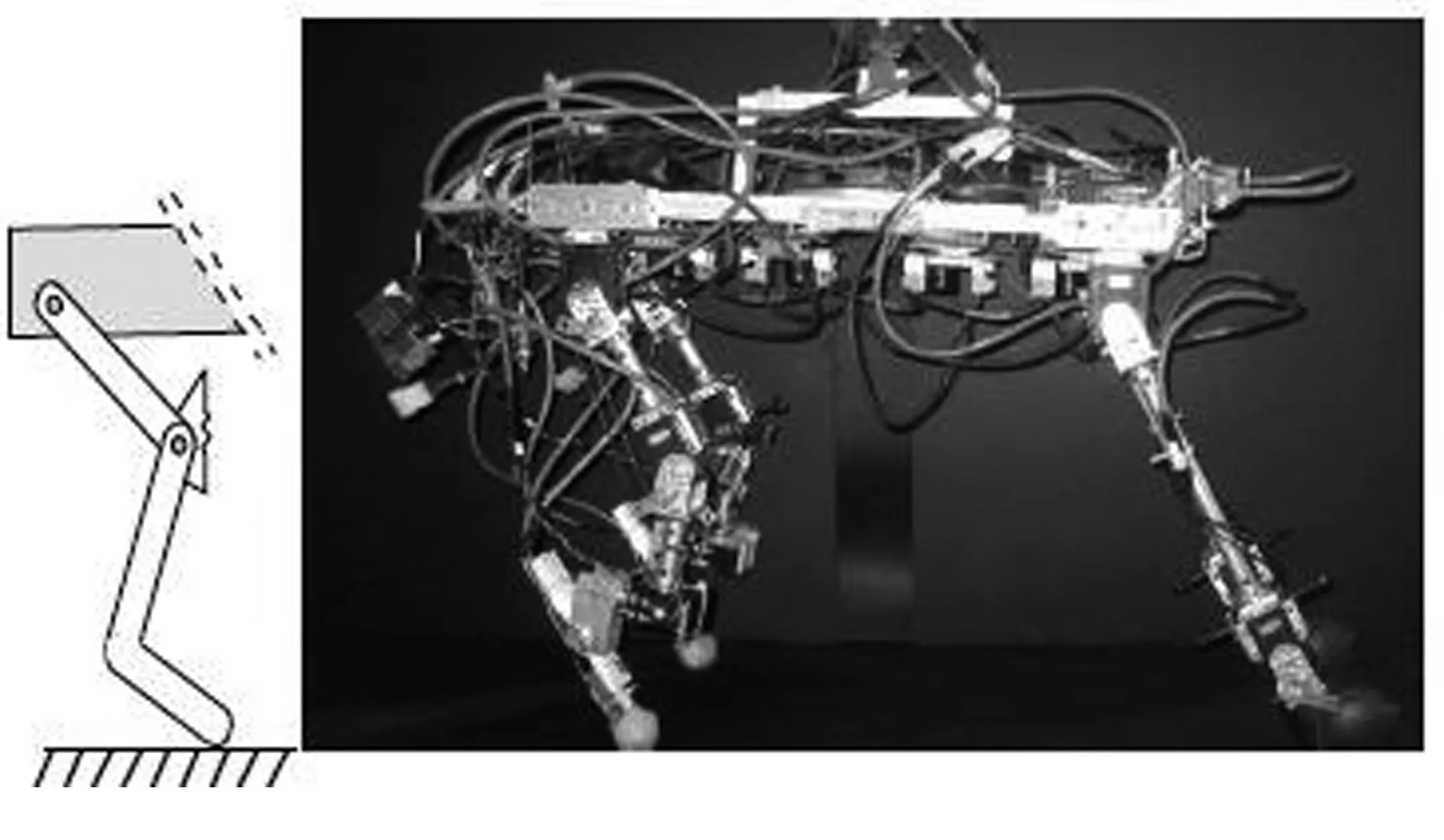
图6 基于飞脚动作的采摘机器人Fig.6 The picking robot based on the action of flying feet
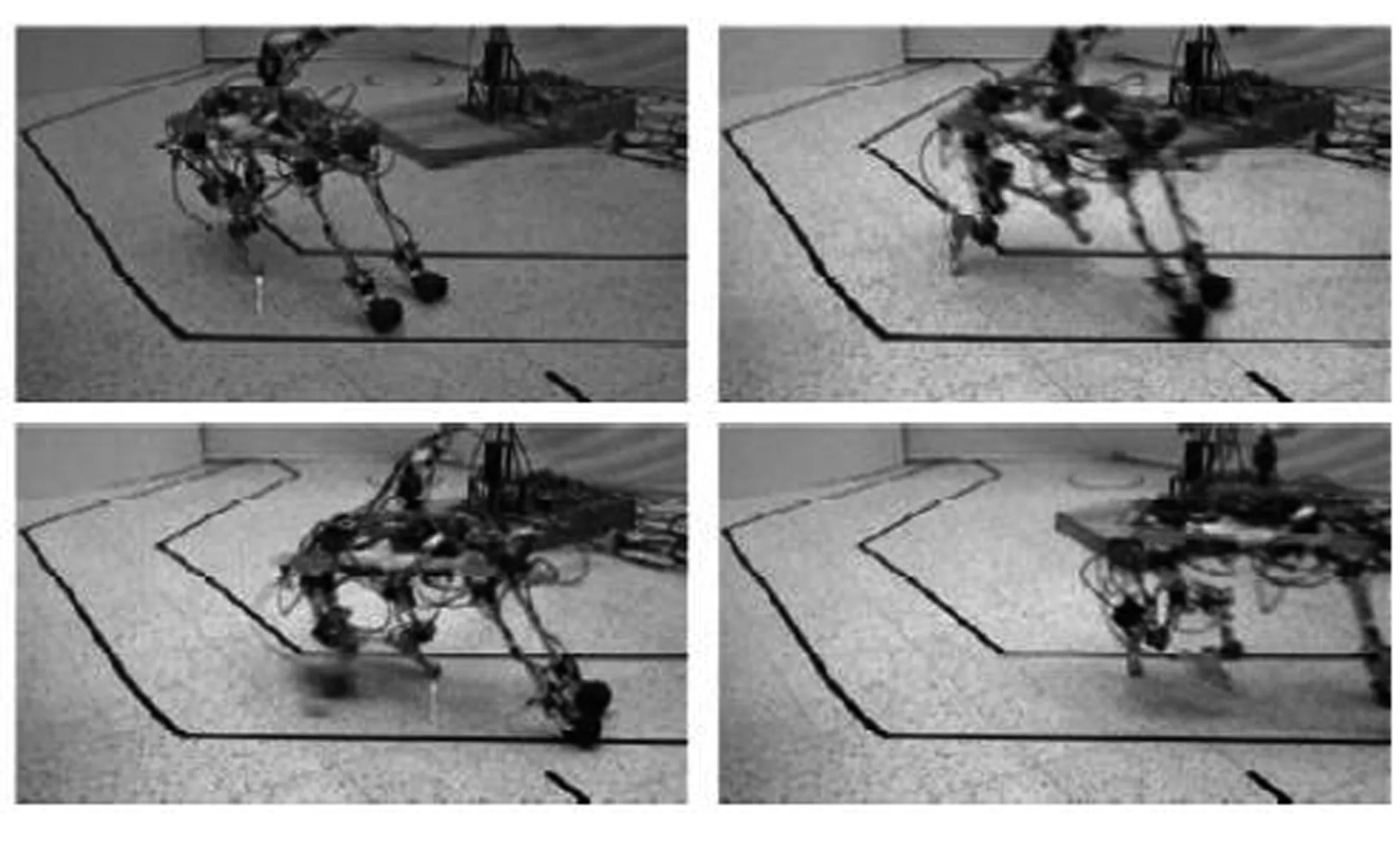
图7 各种动作类人仿真Fig.7 The umanoid simulation of various movements
本次设计的采摘机器人可以根据武术飞脚的各种动作,做类人仿真模拟,实现腿部的各种伸缩动作。为了验证其可以接触到不同高度的果实目标,将其放置在真实的果树环境下进行实验测试,测试环境如图8所示。
为了测试采摘机器人对不同采摘高度的适应能力,选择了果实位置不同的果树,并对采摘高度进行了统计,并绘制出了如图9所示的采摘方位图。

图8 采摘作业环境Fig.8 The picking environment
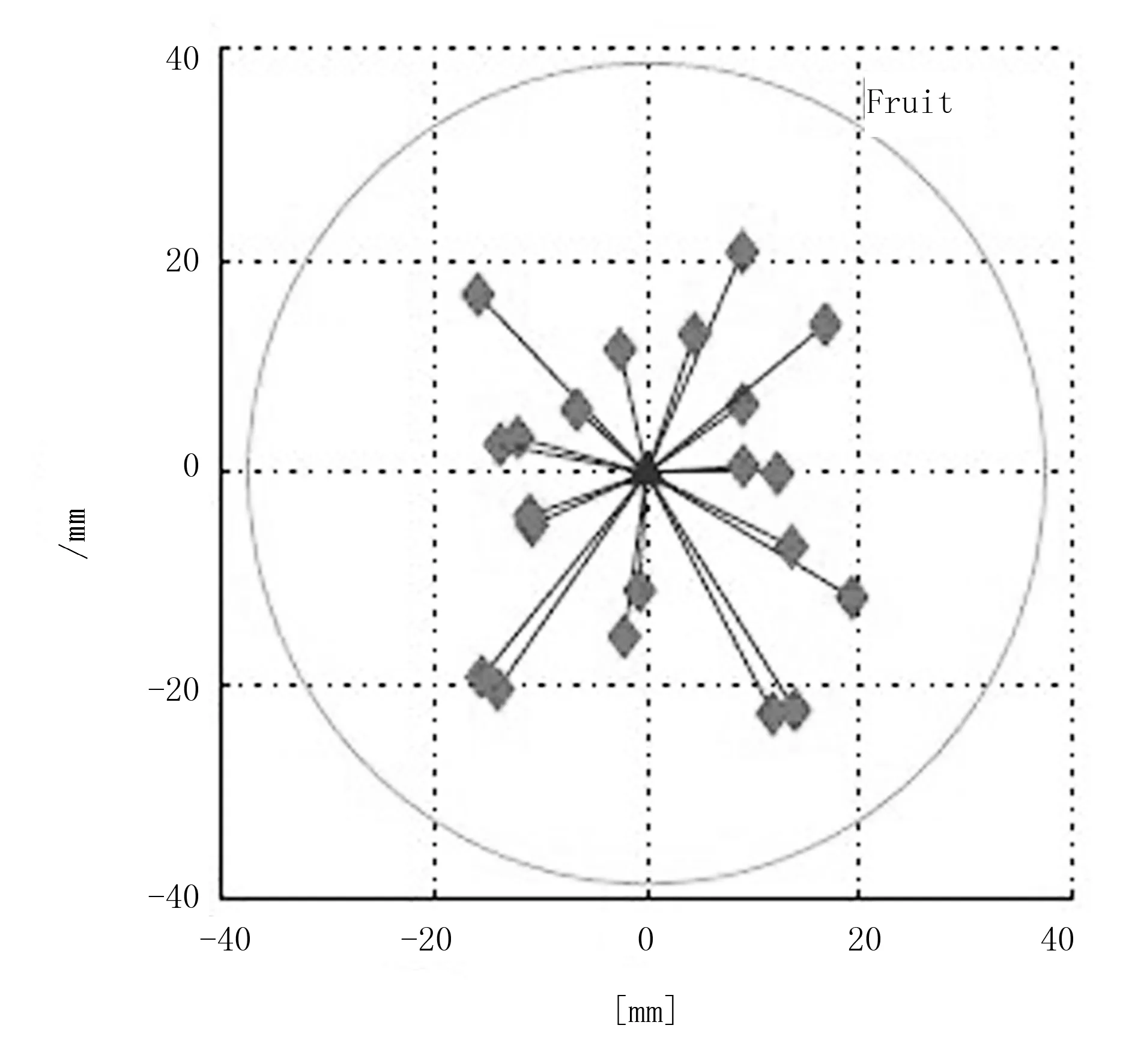
图9 采摘机器人果实成功采摘范围图Fig.9 The successful picking range of fruit picking robot
由图9可以看出:采摘机器人作业的高度范围较大,满足复杂高度条件下的采摘需求。
4 结论
武术飞脚动作是武术学习的主要特征动作之一,其腾空高度的把握有很多的技巧。本次研究对腾空动作的蹬地技巧进行了分析,并将其使用在了类人采摘机器人的设计过程中,实现了采摘机器人的腿部伸缩功能。为了验证武术飞脚动作在采摘机器人上使用的可行性,以实际的果实采摘环境为依托,设计了一款腿部可伸缩的采摘机器人,并测试了其对不同高度果实采摘的作业范围,将作业范围绘制成了采摘范围图。测试结果表明:采摘机器人可以采摘到不同高度范围的果实,满足了不同高度采摘作业的需求,为新型类人仿生采摘机器人的设计提供了技术支持。
