采摘机械手结构和控制系统优化—基于神经网络武术套路训练
2018-08-10巴旭
巴 旭
(河南科技学院新科学院,河南 新乡 453003)
0 引言
武术套路训练时,动作误差的纠正有助于学习者快速地掌握武术动作要领,使攻防动作能够快速、准确地命中目标。采摘机械手的设计主要需要考虑两方面的问题:一是机械结构,要求外形简单、美观大方、经济实用;二是机械手的作业性能,需要能够很好地躲避障碍物,具有最佳的工作空间、尽量少的自由度及合理的结构,而且在作业的过程中能够很好地避开运动死区的位置。为了实现这个目标,可以将武术动作误差训练过程引入到采摘机械手控制系统设计和机械结构优化中,如利用勾拳形状优化机械手手指结构,使其具有更加灵活的动作。因此,采用武术动作误差训练的神经网络PID控制算法对系统进行设计,将明显提高机械手的设计效率,对于现代化自动作业机器人的改进和升级具有重要的意义。
1 武术动作套路训练及其在机械手结构优化中的应用
冲拳是武术动作中最常用的动作之一,此动作较容易犯错误,包括冲拳无力、动作不规范、拳屈腕严重及出拳时在肩部冲出等,在进行武术冲拳动作训练时需要对这些容易犯的错误进行纠正。针对冲拳无力,可以对学生强调出拳的快速性,进行拧腰顺肩等技术动作训练;针对冲拳目标不准,可以对学生进行击靶训练;针对拳面不平屈腕问题,可以讲解冲拳的作用力分析等。
手形关键动作部位是勾尖和勾顶,动作训练时需要五指撮拢成勾、屈腕,其动作误差主要是松指,腕没有扣紧,因此在进行修正误差训练时需要着重讲解勾手的攻防作用。冲拳和勾拳都是较为精准的动作,其完整的武术动作套路训练可以使学习者达到精准攻防的目的,如果将这些动作套路及误差训练方法应用在采摘机械手的结构优化和控制系统设计中,如利用冲拳关键动作设计机械结构,使机械手可以在较小的动作范围内精准的采摘到果实作物,采用勾拳形状可以使采摘机械手终端采摘果实更加灵活,从而有效地提高采摘机械手的设计效果。
2 基于神经网络的动作误差训练算法
武术套路对于采摘机器人动作的精准控制具有重要的影响,特别是冲拳的关节动作和勾拳的拳形,有助于采摘机械手机械结构和控制系统的优化。使用武术套路对采摘机械手进行动作训练时,往往会产生较大的误差,使机械手动作偏离采摘目标,而采用PID控制算法可以通过反馈调节的方式降低误差。其控制原理如图1所示。
运用PID控制器可以对采摘机器人的武术动作训练误差进行校准,通过对误差的反复校验,达到精确控制的目的。其控制方程为
(1)
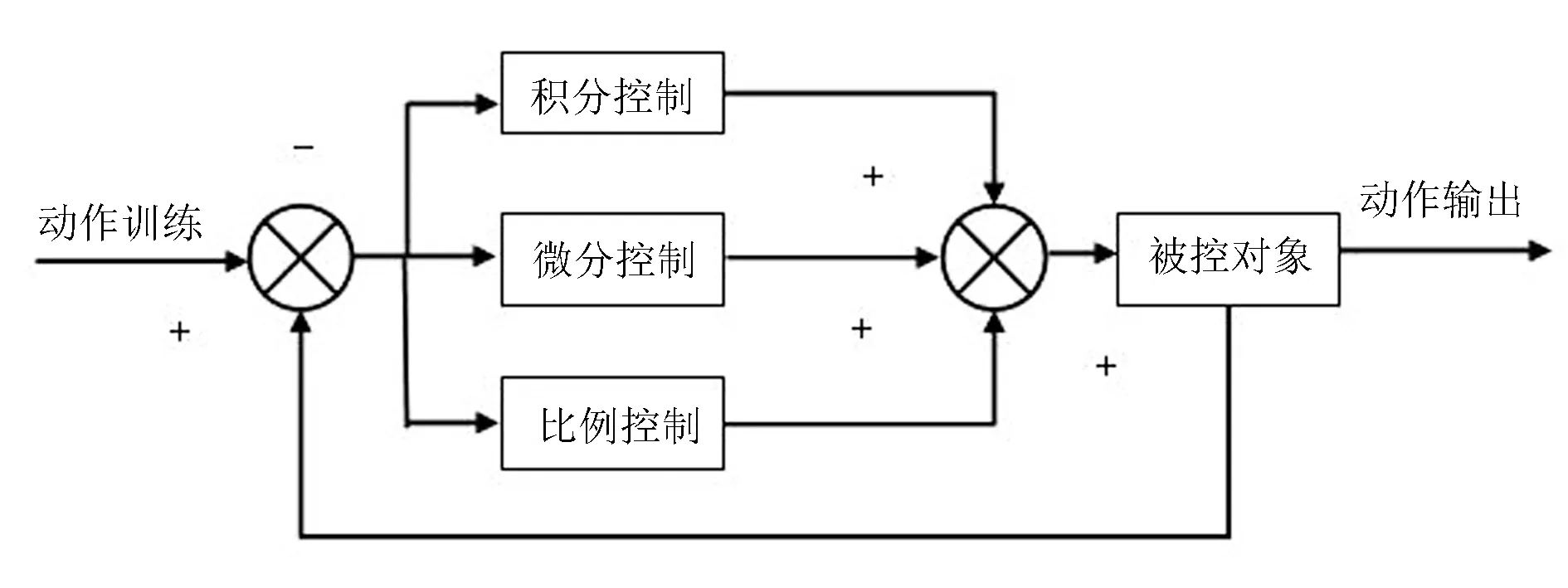
图1 PID控制器原理图Fig.1 The schematic diagram of PID controller
其中,kp表示积分系数;ki表示微分系数;T表示采样周期;e表示计算误差。为了进一步提高控制精度,降低控制误差,可以采用神经网络训练算法对PID参数进行调节。调节原理如图2所示。
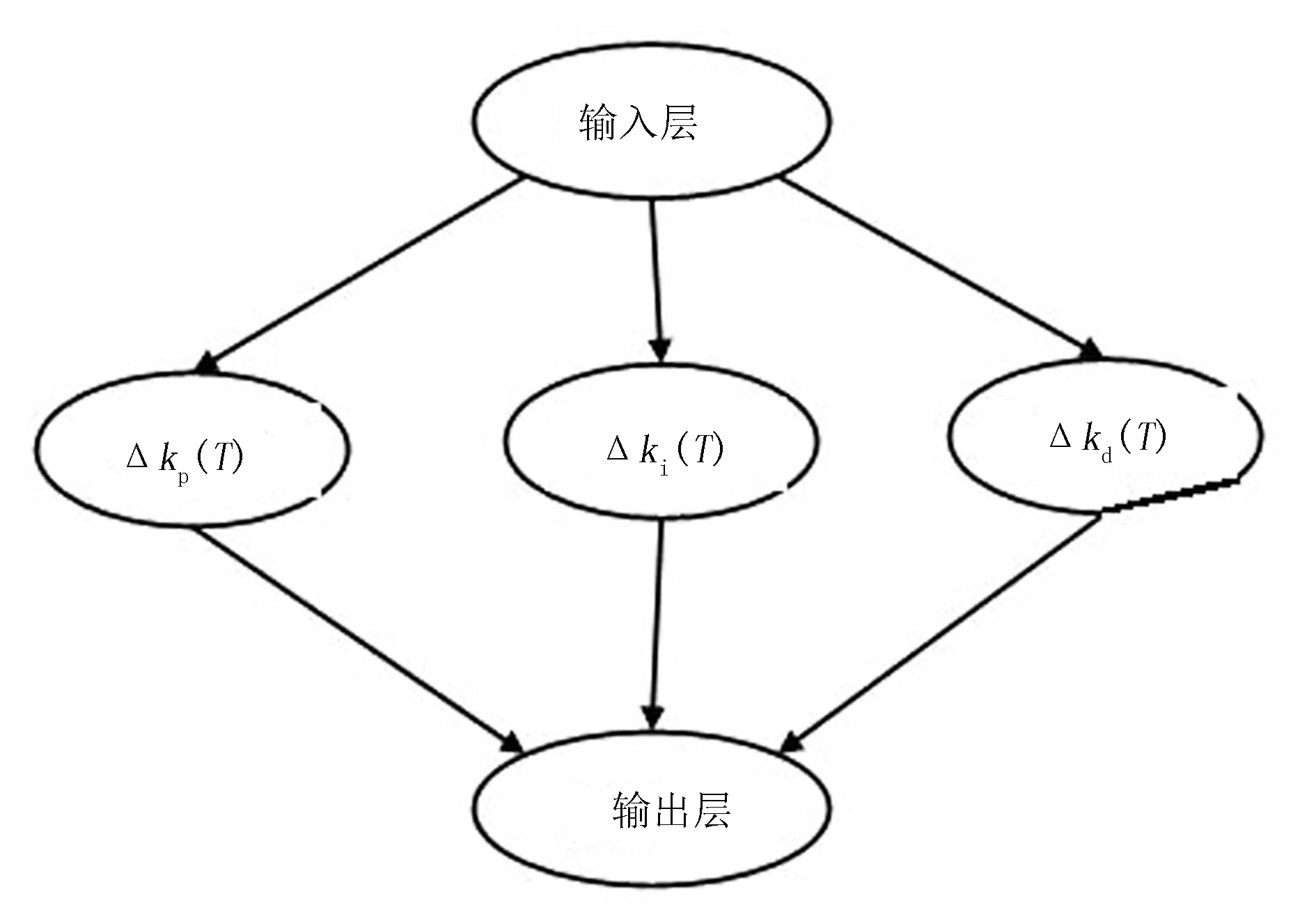
图2 神经网络算法PID控制原理Fig.2 The PID control principle of neural network algorithm
神经网络算法PID算法的控制结构包括神经网络输入层、输出层及隐含推理层。输出层的控制采用增量式PID算法进行控制,其表达式为
Δu(Q)=kp[e(Q)-e(Q-1)]+kie(Q)+
kd[e(Q)-2e(Q-1)+e(k-2)]
u(Q)=u(Q-1)+Δu(Q)
(2)
基于神经网络PID控制算法的具体步骤如下:
1)确定神经网络结构。其中,包括各种权重系数、输入输出节点、隐含层数及各种系数。
2)计算神经网络的实时控制误差error(k)=rin(k)-yout(k)。
3)采用预设参数的方法,对kp、ki、kd等3个参数进行调整,使控制响应达到最佳状态。
4)计算PID控制器的输出u(k)。
5)进行设计网络训练,反复调整权重系数,实现PID参数的自动调控。
6)置k=k+1,返回到第1步。
算法流程图如图3所示。
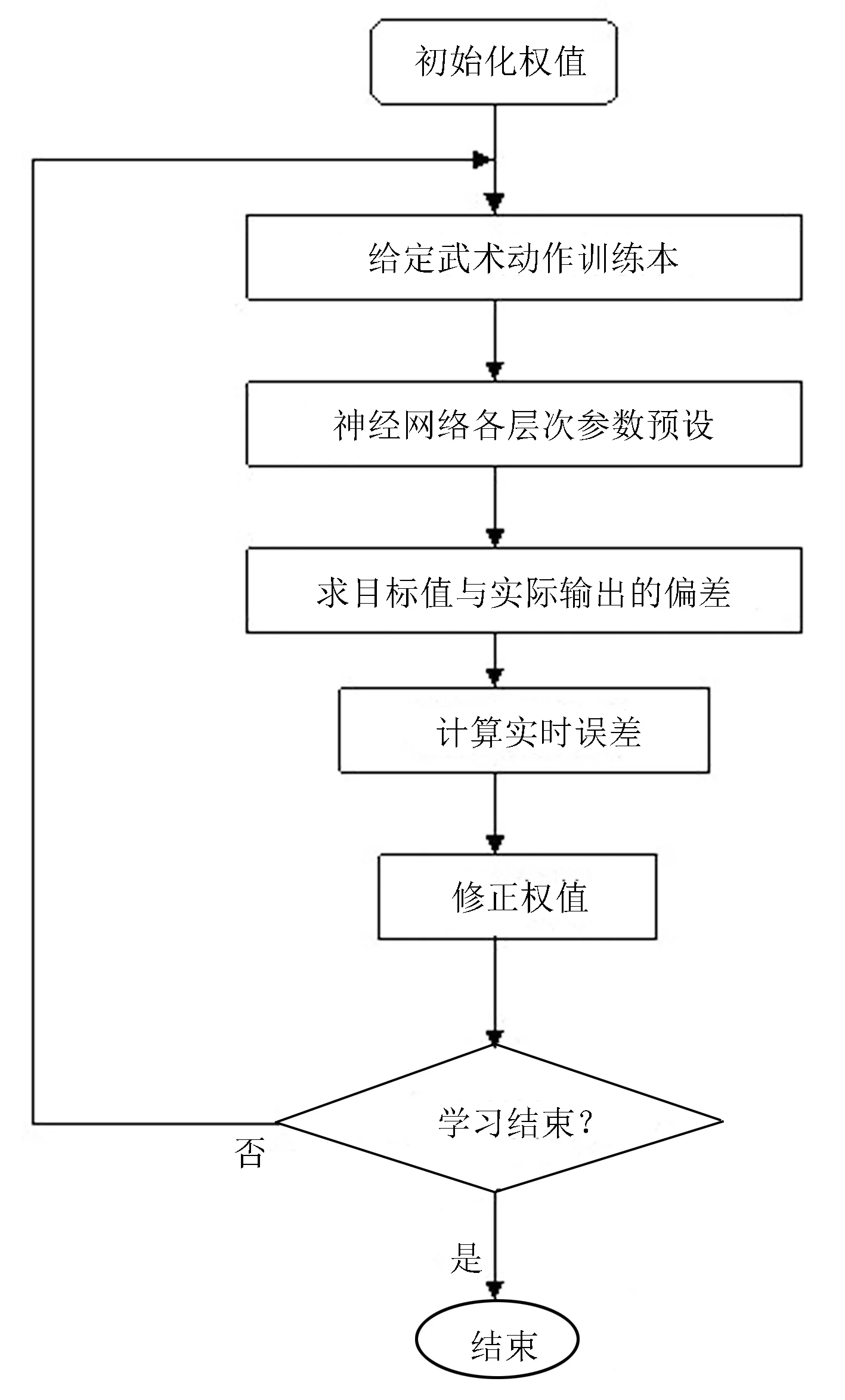
图3 神经网络算法流程图Fig.3 The flowchart of neural network algorithm
根据武术动作套路的动作规范,在对采摘机械手进行训练时,首先可以对动作样本进行预设,然后通过计算实时误差,采用神经网络PID算法对误差进行调节,并达到迅速响应的目的,最后提高动作控制的精度。
3 基于武术套路训练的采摘机械手结构优化和控制系统测试
本节中主要结合第1节的武术动作的勾拳冲拳和勾拳形状,对采摘机械手进行结构优化,依据神经网络误差训练方法,对控制系统进行测试。冲拳动作机械手结构优化如图4所示。
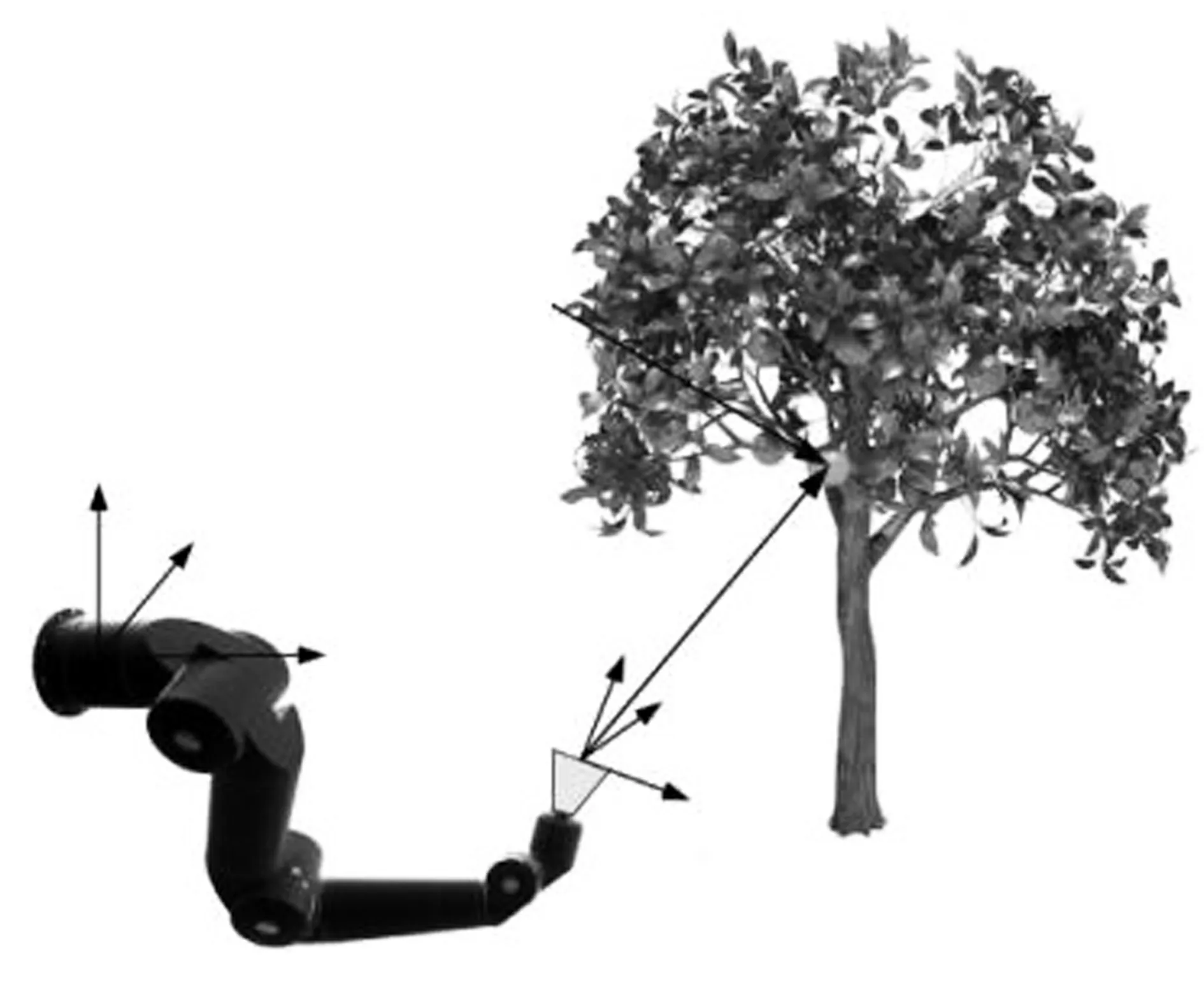
图4 冲拳动作机械手结构优化Fig.4 The structure optimization of punching manipulator
根据武术训练的冲拳动作,对采摘机器人的关节进行了优化设计。优化过程主要根据果实的位置信息,结合勾拳得动作形状,对关节的弯曲角度进行了优化,从而使采摘机械手的动作更加准确。
勾拳手形结构优化如图5所示。在进行较小作物果实的采摘时,采摘手形对采摘质量的影响较大,采用勾拳手形动作可以降低果实的破损率,且通过反复训练,可以提高采摘速度。为此,对机械手的采摘范围进行了测试。
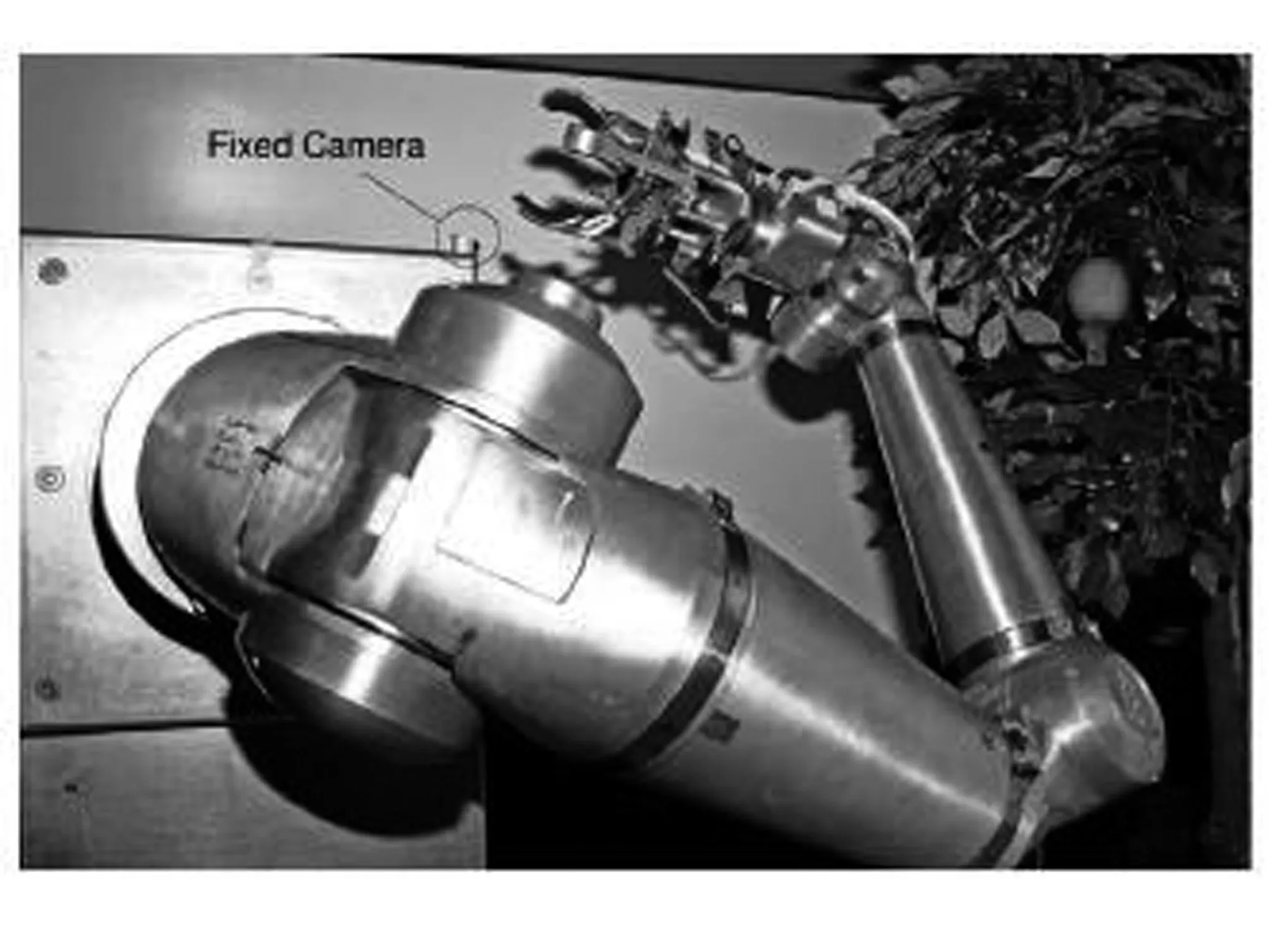
图5 勾拳手形结构优化Fig.5 The hook shape structure optimization
图6为通过测试得到的采摘范围二维平面图。测试结果表明:采摘机器人可以对左右浮动30cm×100cm范围内的果实进行采摘。
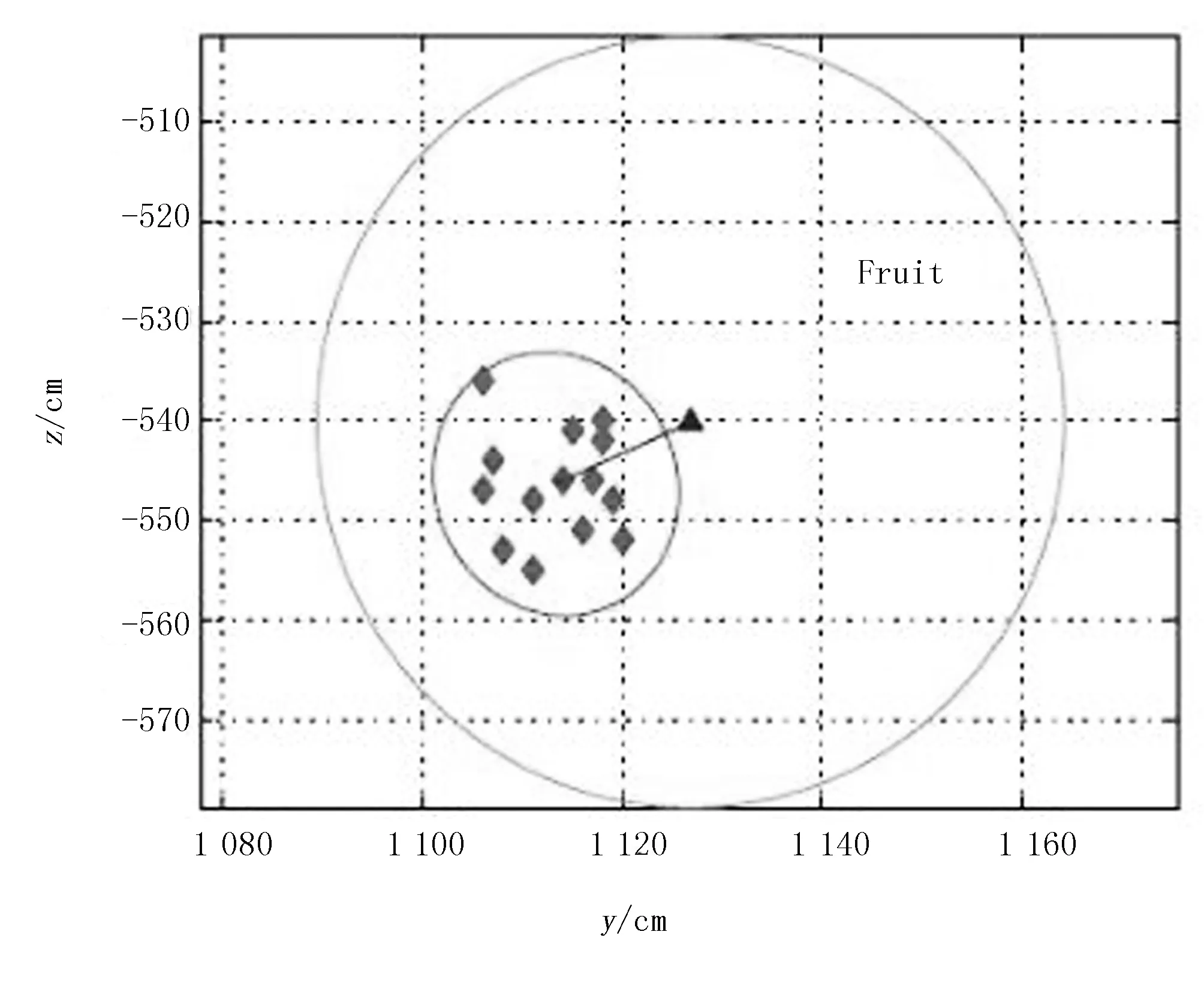
图6 采摘范围二维测试结果Fig.6 The two dimensional test results of picking range
采摘机械手的三维动作测试范围如图7所示。测试结果表明:采摘机械手可以实现三维的空间动作,并且动作范围满足果实采摘的需求。为了进一步验证神经网络训练算法的效果,对普通PID控制和神经训练PID的参数进行了测试,分别得到了如图8和图9所示的结果。
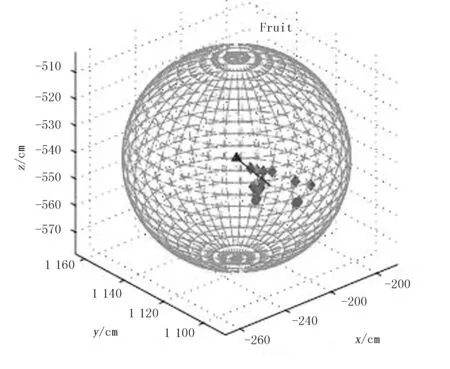
图7 采摘机械手三维动作范围Fig.7 The three-dimensional range of motion of a picking manipulator
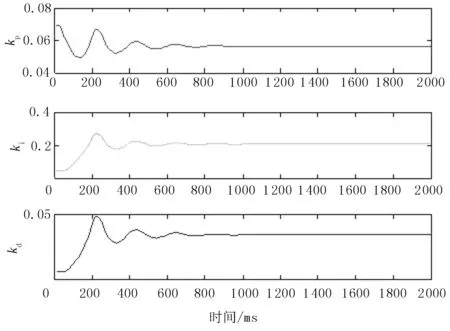
图8 PID控制参数变化曲线Fig.8 The change curve of PID control parameters
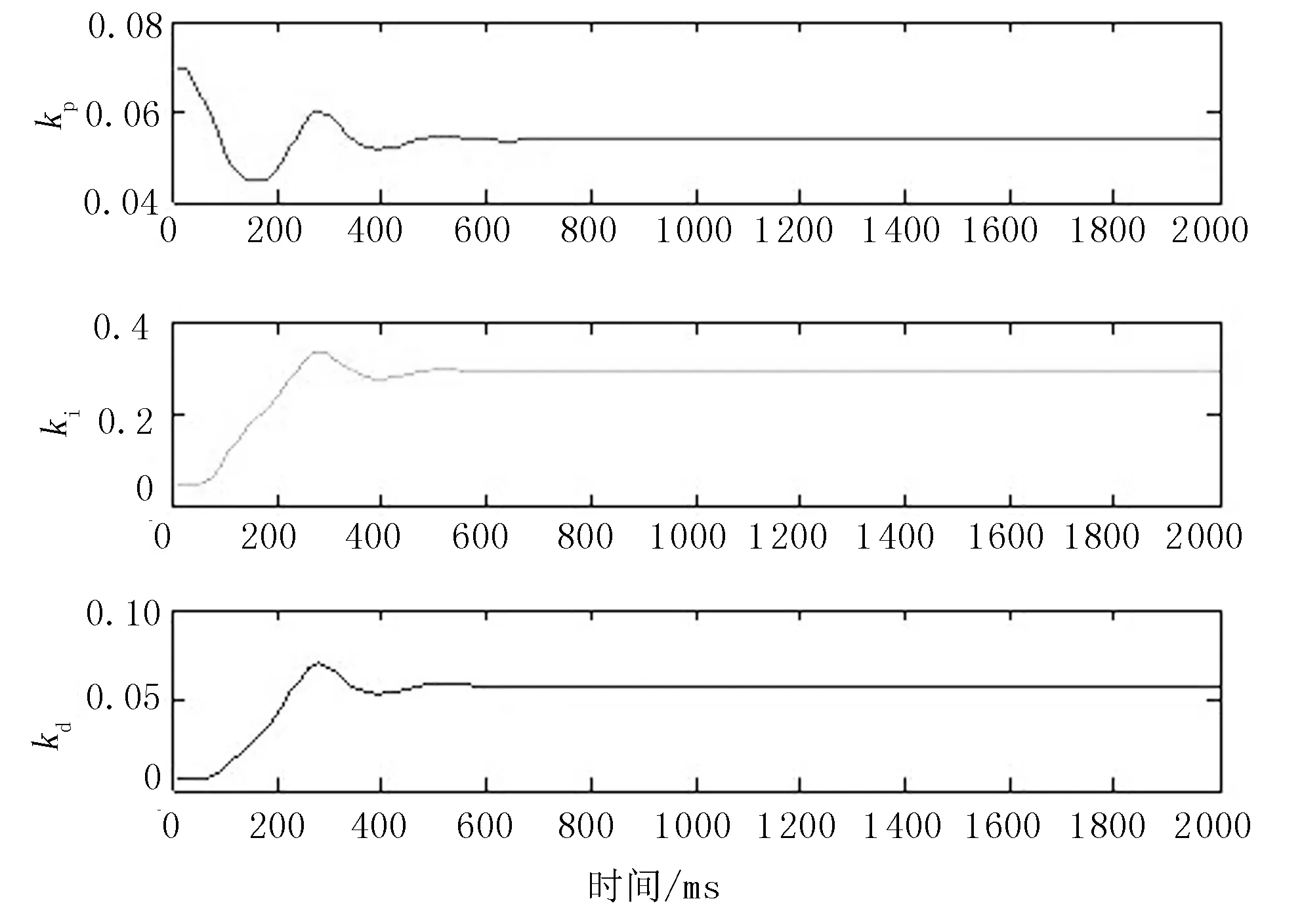
图9 神经PID参数变化曲线Fig.9 The change curve of neural PID parameters
由图8可以看出:采摘机器人的动作响应较为迅速,最大响应时间仅为1s,1s之后便可以达到稳定的状态。
由图9可以看出:采用神经网络算法训练后,采摘机械手的控制仅在600s内就可以达到稳定状态,有效地提高了机械手的反应速度。
图10为神经网络训练次数对应的动作误差曲线。图10表明:随着神经网络训练次数的增多,采摘机械手的动作呈现下降的趋势,最后使误差降低到最小,从而验证了基于武术套路训练的神经网络算法对采摘机械手控制系统的优化作用,提高了采摘机械手的作业性能。
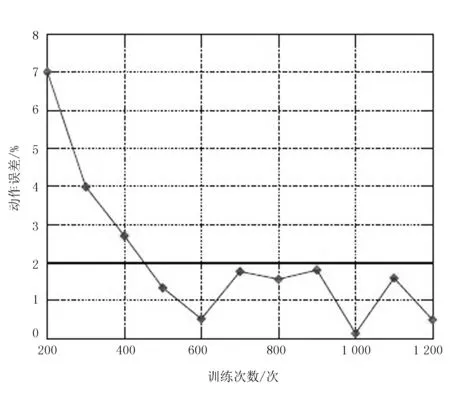
图10 误差响应曲线测试Fig.10 The curve test of error response
4 结论
为了使采摘机械手具有更好的灵活性,提高其作业性能,将武术套路误差纠正训练算法引入到了采摘机械手的设计过程中,通过勾拳拳形对机械手的末端进行了结构优化。通过神经网络PID控制算法,对机械手控制系统进行了优化升级,从而提高了机械手的动作速度和准确性。为了验证设计方法的可靠性,对采摘机械手进行了动作范围和动作误差的实验,结果表明:采用神经网络误差训练方法对采摘机械手进行训练后,其二维和三维空间动作范围都可以满足采摘需求;同时,利用设计网络PID控制器后,其动作响应速度有了明显的提高,动作误差也随着训练次数的增多而降低,从而有效地提高了机械手的作业性能,可以满足高精度复杂环境下作业的需求。
