基于DSP的移动采摘机器人目标识别视觉系统设计
2018-08-10吴义满
吴义满
(江苏医药职业学院,江苏 盐城 224000)
0 引言
机器视觉的核心技术“光电图像传感”和“图像处理”技术的发展,给机器视觉的发展奠定了基础。在“光电图像传感”技术的发展过程中,CCD图像传感器的出现使CCD摄像机取代了硅靶管摄像,从而使图像采集的小型化、廉价、功耗低成为可能。以CPU、DSP及大规模可编程逻辑器件为代表的图像处理硬件技术的飞跃,使图像处理在速度、价格、功耗等方面的广泛应用成为可能。将DSP处理器应用在采摘机器人的目标识别系统设计中,可以有效地提高机器人视觉系统的反应速度,减轻机器人的质量,从而提高机器人的作业效率。
1 视觉伺服控制系统和嵌入式DSP处理器总体设计
目前,采摘机器人设计的机器视觉伺服控制系统有两种:一种是基于位置的,该方法需要对三维姿态进行实时估计;另一种是直接基于图像的,将图像的特征信息直接用于反馈,其结构框架如图1所示。通过CCD相机采集得到的图像直接使用嵌入式DSP进行图像处理,通过边缘检测等技术得到图像的基本特征,将特征信息进行反馈,用于采摘机器人的动作控制。
2 移动式采摘机器人目标识别视觉系统设计
采摘机器人的机器视觉系统主要是一个光电转换装置,利用该装置可以将采集得到的图像信号转换为计算机能够识别和进行处理的信号,因此在采集图像时需要使用特殊的采集装置。CCD相机及图像传感器是近几年发展的一种新式的图像采集装置,它可以在采集图像的同时进行数字化处理,将图像直接转换成电信号,从而实现图像的保存、处理和可视化显示等。CCD相机和图像传感器的工作原理如图2所示。
CCD图像传感器和传统的器件不同,传统器件往往都是使用电压或者电流作为信号,而CCD图像传感器是利用电荷作为信号的。电荷是通过两种渠道产生的:一种渠道是光注入,另一渠道是电注入。CCD一般是通过光注入来产生电荷,其中电荷信号QI与光照强度Δn、光照时间TC、光敏电阻的面积A成正比例关系,即
QI=η×q×Δn×A×TC
(1)
其中,η为所使用材料的的量子效率;q为电子电荷量。对采集的图像进行图像分割和边缘检测才能有效地对目标进行识别,识别时可以色彩为识别依据。对于色彩的识别,Roberts算子是一种非常有效的方法,该算子可以检测出灰度或者图像中色彩比较突出的部位。色彩变化突出的部位一般梯度较大,假设通过采集得到的一幅图像其色彩分布为f(x,y,λx,y),对于一个像素点(x,y),其色彩变化在x、y方向的表达式可以表示为
(2)
在数字图像中,fx、fy可用x、y方向的差分(Δx,Δy)表示,即
(3)

(4)
其中,p、q为阶数;s为整个图像的区域,在进行求解时需要借助图像区域的零阶矩和一阶矩;在进行定位时,图像可以当成二值图来处理,即f(x,y)=1。这样,零阶矩m00可以表示为
(5)
零阶矩就是图像目标区域的面积,其一阶矩为
(6)
则区域的质心(xc,yc)表示为
(7)
定位出目标物体在一幅图像中的位置后,就可以根据事先设定好的坐标对物体进行跟踪。其中,硬件基本框架如图3所示。

图2 CCD图像传感器工作原理
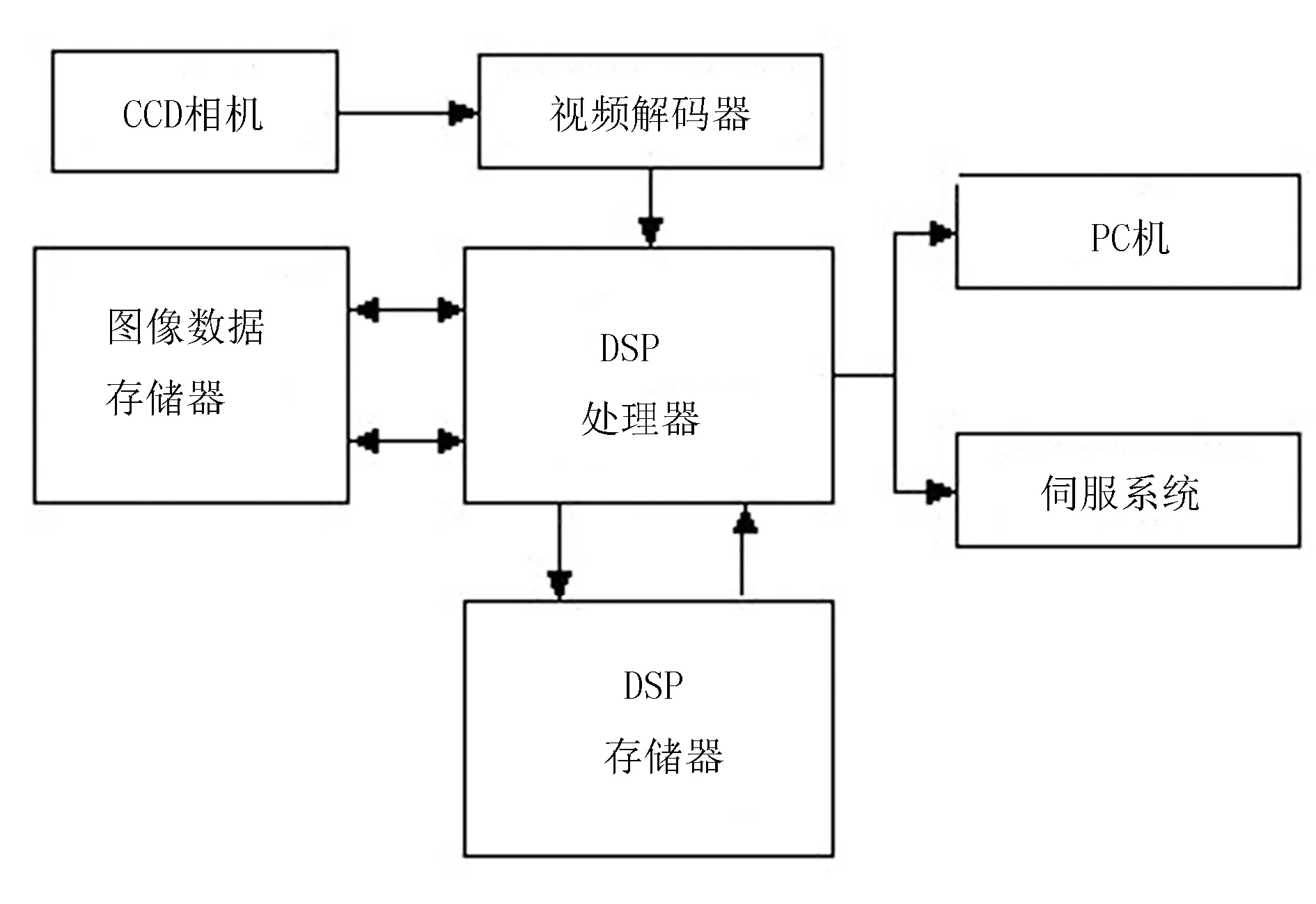
图3 基于DSP的图像目标识别硬件系统基本框架
利用DSP可以将CCD相机采集到的模拟信号转换为数字信号进行储存,还可以对视频和图像进行处理,并将图像和视频信息利用CAN总线传送给PC机,以便进行处理和观察。PC机对图像进行分割和边缘检测后,计算出目标的具体位置,然后发出指令传输给DSP处理器,DSP将指令发送给私服系统,控制采摘机器人的移动。
图4表示基于DSP的采摘机器人目标识别的软件流程。其中,图像的传输和边缘检测都由DSP芯片协同完成,在识别出作物目标后对其进行定位,本次定位程序结束;如果没有识别出目标,则重新进行图像采集和传输,利用多套备用的图像检测算法对目标进行识别,直到作物的目标被准确地识别出来,结束软件流程。
3 基于DSP的移动采摘机器人目标识别视觉系统的设计
为了验证DSP在移动机器人目标识别系统设计中使用的可行性,对基于DSP的视觉系统的性能进行了测试。测试过程中使用了DSP处理器、PC机及CCD摄像机采集设备,如图5所示。

图4 基于DSP的图像目标识别软件流程

图5 基于DSP的移动采摘机器人视觉系统测试
本次主要对其视觉系统进行测试,测试环境选择黄瓜大棚作业环境,视觉系统安装在采摘机器人上,如图6所示。
采摘机器人安装了自主行走装置,并在黄瓜大棚的田垄间行走,主要采用视觉系统对黄瓜图像进行采集。通过采集设备采集得到的高清图像如图7所示。
利用DSP处理器首先对图像进行处理,通过边缘检测技术对目标特征进行提取,得到了如图8所示的处理结果。

图6 采摘机器人实验场景

图7 CCD高清图像采集

图8 图像处理结果
通过DSP处理传送给PC机,通过特征的提取可以得到目标的轮廓,通过颜色的提取可以得到果实目标的成熟度,从而准确地识别待采摘果实。
由表1可知:采用DSP的移动式采摘机器人目标识别系统的准确识别率较高,且用时较短,可以满足高精度、快速定位果实目标的需求,有效地提高了采摘机器人的自动化程度。
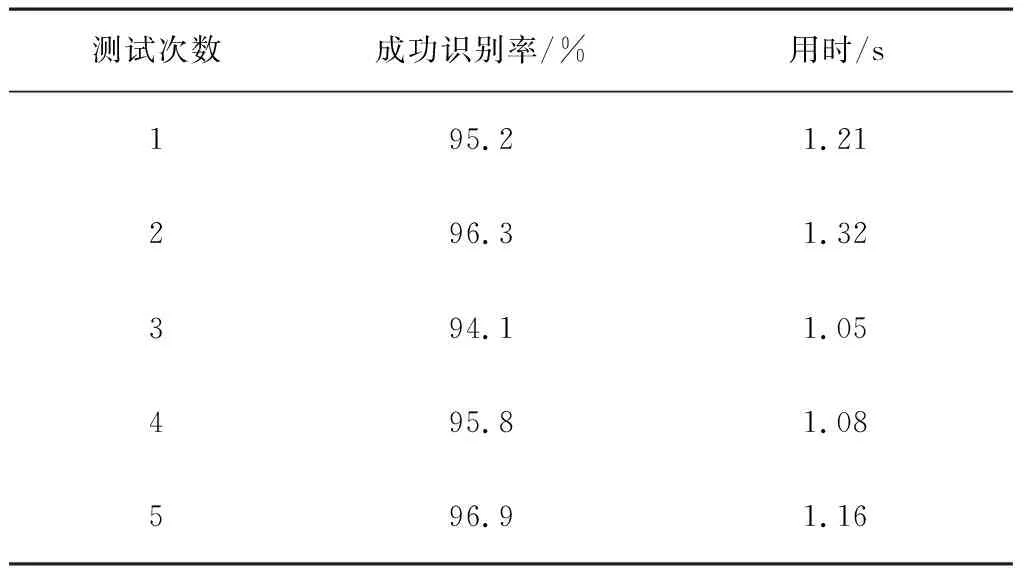
表1 果实目标成功识别和用时测试
4 结论
结合嵌入式DSP系统和图像处理技术,设计了一种新的采摘机器人目标识别系统,系统采用DSP处理器直接对图像特征进行提取,并将提取的信息直接用于控制信息的反馈。对采摘机器人视觉系统进行了测试,结果表明:采用DSP处理器可以直接对CCD采集到的黄瓜图像进行特征提取,且识别的准确率和效率都较高。DSP的型号还有很多,不同型号对采摘机器人视觉系统的影响还有待于进一步的验证,通过不断的测试发现更加小巧、轻便、高效的采摘机器人,使其具有更加广阔的应用前景。