基于DWT的彩色图像分量的红枣分拣机器人定位系统
2018-08-10潘梁静
潘梁静
(商丘职业技术学院,河南 商丘 476000)
0 引言
在红枣生产过程中,需要根据枣果质量标准和红枣实际大小、颜色、成熟度等方面进行分级,分级后便于枣果包装、销售、运输和贮藏,也便于以质论价,提高经济效益;而通常整个分级过程通常由人工完成,任务繁琐且强度大。为了解放劳动力、提高分拣作业效率,本文结合红枣分级特征,将DWT彩色图像分量算法和视觉定位算法应用于分拣机器人的优枣识别作业中,实现了优质红枣的自动分拣功能。
1 基于DWT的彩色图像分量算法
离散小波变换因其可以解析出图像各种低频子带的主要信息因子,被广泛应用于图像分量处理等研究学科。彩色图像分量算法实际上是将摄像机拍摄的图像转换成固定像素的图像格式,并做出颜色空间转换,得到灰度图像DWT,进而获取图像的特征信息,用于目标红枣对象的筛选。
1.1 彩色图像分量算法的重要步骤
在进行图像分量算法的过程中,处理完成后的图像的视觉信息不会发生大的变化,但会改变其图像信息。通常情况下,为了获得图像视觉信息的固有特征,首先会对图像进行简单的预处理,得到一个统一大小的图像,然后提取稳健的DWT特征点;最后对特征点进行计算分析,并根据特征集构建甄别条件。彩色图像分量算法的重要步骤如图1所示。

图1 算法的重要步骤
1.2 预处理
图像的预处理包括格式转换和原图像的获取两部分。格式转换是采用双H插值法将图片转变为规划化格式,并利用RGB方法进行颜色空间转换。RGB颜色空间模型如图2所示。
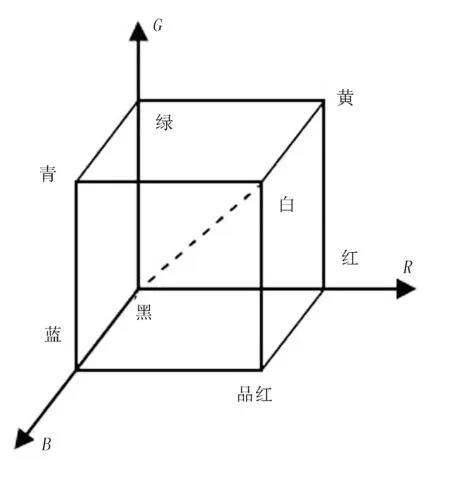
图2 RGB颜色空间模型
原图像是利用CCD摄像机进行拍摄获取的,图像采集模块可以对颜色空间和颜色特征进行分割,提高视觉特征点的稳健性。彩色图像分量算法的图像采集流程如图3所示。
1.3 图像DWT特征点的提取
1)利用DWT算法将预处理得到的图像进行灰度处理,使其从空域转换到频率域。
2)将DWT转换后频率域的子带LL分割成b×b块,并对其进行编号,假设Bj为第j块。
3)求出Bj的列项组成高维向量Xj。
4)将Xj分为n组,其中1组为
(1)
r=num(x)-n×a
(2)
在式(1)、式(2)中,[ ]里面求得的是整数;num(x)指元素的个数;r是余数,表示num(x)分成n组后余下来的部分。
5)计算图像特征点。本文采用均值的方法提取图像的特征点。假设Yi(k)是Yi的第k元素(1≤k≤K,K为每组最大的元素总数),则求均值公式为
(3)
根据式(3)可以得到计算图像特征点的特征点矩阵,即
(4)
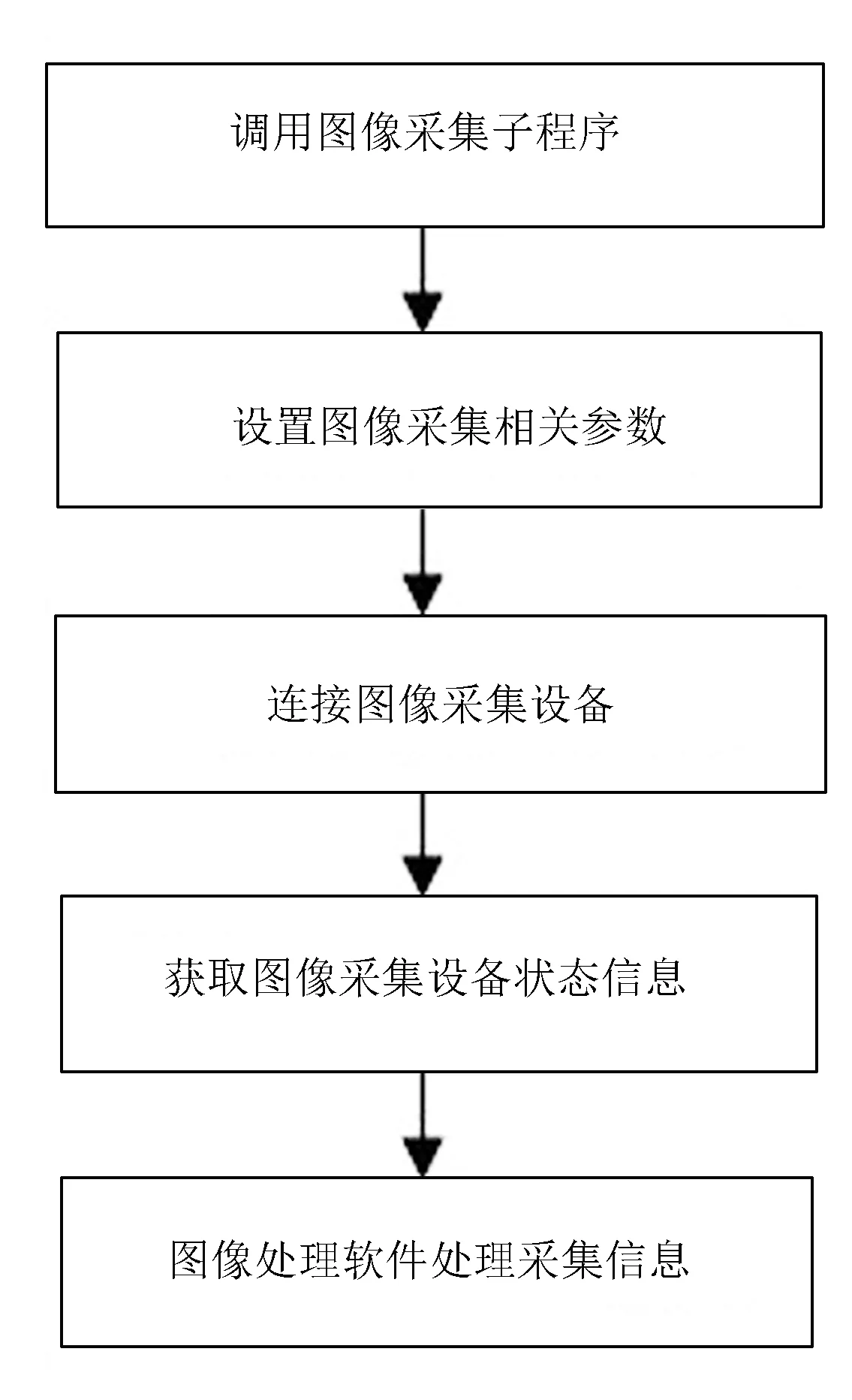
图3 图像采集流程
1.4 图像特征点的提取
一般情况下,提取到的特征点对图像实际位置不会造成影响,因此可以利用特征点计算其距离。设A=[m1,m2, …,mp],mp为A的列向量,则具体实现过程如下:
1)计算基向量m0=[m0(1),m0(2), …,m0(p)]。
(5)
其中,p为第p个元素;mp(i)为mp的第i个元素。
2)计算m0和mj之间的范数值。
可以得到特征集D=[d1,d2, …,dp]。
3)用特征集D构建甄别条件,用于目标对象的筛选。
2 红枣分拣机器人整体设计
机器视觉与DWT彩色图像分量处理系统是红枣分拣机器人筛选的主要手段,可以对目标对象进行优劣分级作业。该系统主要功能为:①根据红枣大小和色泽对其品质进行分级;②根据机器视觉对红枣进行定位抓取。红枣分拣机器人主要包括并联机器人、灵巧手、运动控制、CCD摄像机、DWT彩色图像分量、光源、镜头及光学器件等部分。整体框架如图4所示。
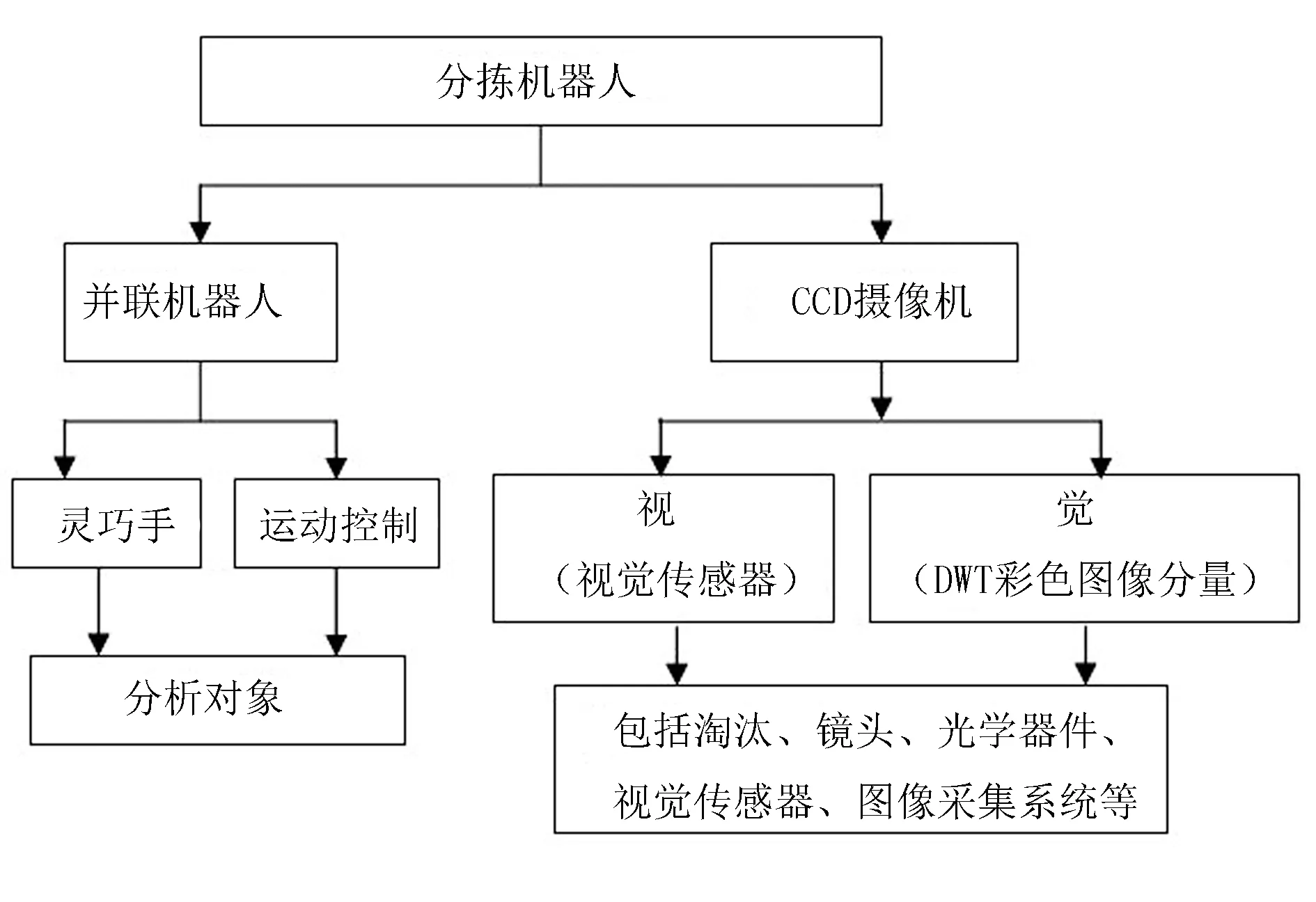
图4 红枣分拣机器人整体框架图
1)并联机器人。并联机器人由机械臂、灵巧手、运动控制器及各关节驱动电机构成,可根据视觉系统的分析判断结果,驱动控制灵巧手去分拣红枣,完成抓取动作。
2)视觉传感器。本文所使用的是康耐视Checker 4G视觉传感器,配备内置摄像头、处理器、照明器件、光学器件和I/O原件,每秒最多可读取100个目标对象,比传统的CCD摄像机识别效率提高数10倍。本文采用该视觉传感器,能够大大提高红枣筛选速度和正确率。
3)灵巧手和运动控制。在实际的应用中,灵巧手安装在分拣机器人末端控制器上,通过运动控制系统控制灵巧手进行分拣操作。
4)分拣对象。分拣系统采用皮带输送机传送红枣,不同大小、色泽度的红枣被放在托盘中,供分拣机器人筛选。
3 红枣分拣机器人定位系统设计
红枣分拣机器人在分拣过程中,灵巧手选取目标红枣的Z轴高度始终不会发生改变,而托盘在滚带上运行时位置会有变化,因此在整个分拣过程中只需对x、y坐标进行定位。分拣机器人必须通过视觉系统才能测量出目标红枣的准确位置。分拣过程示意图如图5所示。
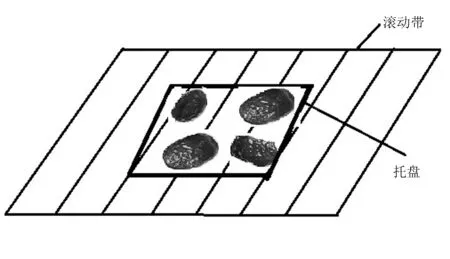
图 5 分拣过程示意图
3.1 建立分拣对象数学模型
分拣机器人在对目标红枣进行作业过程中,红枣的位置与其起始位置及皮带移动速度有关。由于皮带是匀速转动,因此首要问题是对目标红枣的准确定位。在灵巧手作业过程中,对目标红枣的现场感知和判断都需要机器视觉的支撑,因此建立分拣对象机器视觉模型意义重大。分拣过程数学模型坐标系如图6所示。
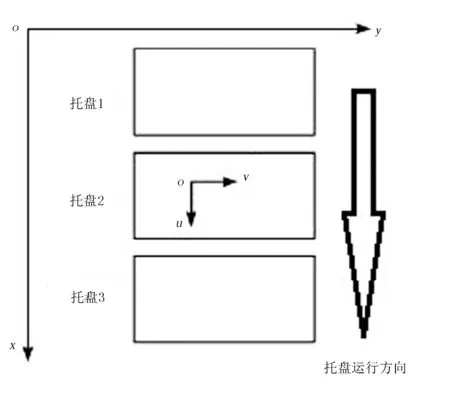
图6 分拣坐标系
3.2 建立托盘定位数学模型
托盘定位数学模型坐标系建立在皮带运输周转箱上,托盘上红枣在坐标系中的位置可以用坐标集合表示,即
m1(u1,v1),m2(u2,v2),…,m8(u8,v8)
(7)
每颗红枣的坐标在托盘上都有固定的位置坐标,可以根据托盘的位置确定红枣的坐标(u1,v1)。托盘定位数学模型坐标系uov如图7所示。

图7 托盘定位坐标系
3.3 uov与xoy间的关系
托盘定位坐标系uov与分拣坐标系xoy的对应关系为
(8)
其中,R为托盘基坐标系发生偏转的矩阵值。
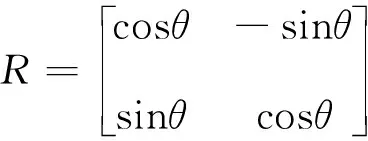
(9)
其中,x0、y0、θ为托盘位置和偏转角度。
托盘位置旋转示意图如图8所示。
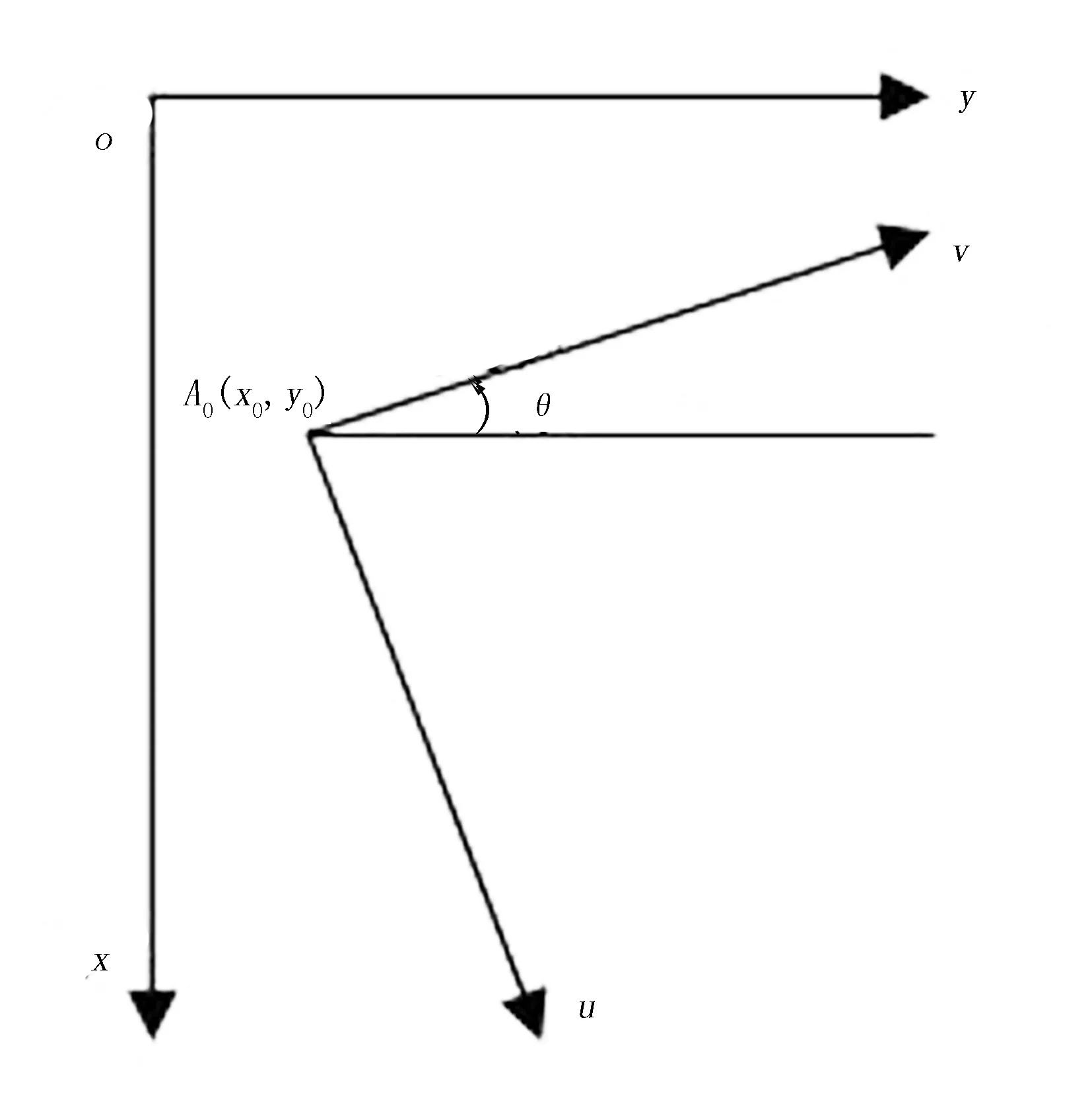
图8 托盘位置旋转示意图
3.4 托盘上每颗红枣的定位
托盘上红枣mi(ui,vi)在xoy坐标系中的位置mi(xi,yi)为
(10)
3.5 算法仿真实验设计
为验证该基于DWT彩色图像分量视觉定位算法是否符合设计要求,本文利用MatLab仿真软件进行测试分析。在模拟仿真中,系统对多幅拍摄有红枣托盘的图片进行识别,并对符合等级要求的红枣进行定位。算法仿真流程如图9所示。
图9 自动定位算法仿真流程图
算法仿真流程说明如下:
1)设定信标节点:初始化,选取100张不同图片作为试验材料。
2)加入随机噪声:对处理过的图片理论颜色分量值加入信号噪声,构成加入环境因素的实际参数值。
3)筛选:筛除掉图片信息较弱的个别信标节点。
4)确定优化初值:利用极大似然法优化初值。
5)优化计算:优化计算函数,减少红枣定位误差。
6)输出结果。
4 试验结果与分析
为了检验红枣分拣机器人分拣作业的准确性,验证其是否能成功分拣符合要求的红枣,特将该系统应用到新疆贡果的分拣作业中。要求分拣机器人挑出纵径5.3~5.5cm、粗横径3.7~3.9cm、细横径3.1~3.5cm、皮色紫红的红枣。在试验中,共有红枣5 000颗,符合贡果要求的有2 986颗。分拣机器人作业结果如表1所示。
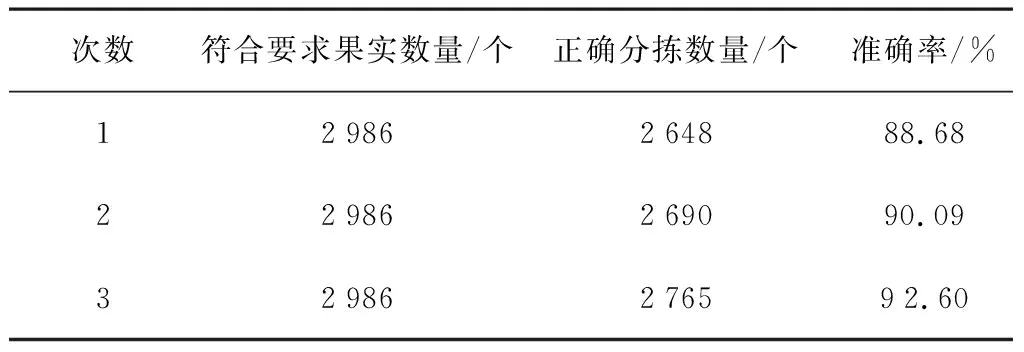
表1 分拣机器人作业结果
由表1可以看出:在3次分拣作业中,机器人分拣成功率均在88.5%以上,能够实现对目标红枣的精确定位,可以完成对符合要求红枣的分拣作业。
5 结论
本文首先分析了基于DWT的彩色图像分量算法中从预处理到提取DWT特征点、计算特征点距离等重要步骤;进而对分拣机器人整体架构进行了设计,主要包括并联机器人、视觉传感器、灵巧手和运动控制等核心部分;最后,建立了分拣对象和托盘定位等数学模型,实现了红枣分拣机器人定位系统的设计。试验结果表明:机器人分拣成功率均在88.5%以上,能够实现对目标红枣的精确定位,可以完成对符合要求红枣的分拣作业。
