可自主跨越障碍物弹跳式采摘机器人设计
——基于跨栏跑摆腿技术动作分析
2018-08-10赵志伟
赵志伟
(内蒙古医科大学,呼和浩特 010110)
0 引言
随着机器人的飞速发展,机器人的各种型式越来越多,但可以自主跨越障碍物的机器人较少。受作业环境的影响,采摘机器人的作业环境往往比较恶劣(如山地),由于地势不平坦,障碍物较多,严重制约了采摘机器人的移动和自主定位。如果在采摘机器人上安装一个弹簧装置,主要利用弹簧压缩产生弹性势能,弹簧释放时,作用于地面的弹力反作用于机器人,使机器人可以跳跃,从而让其自主的越过障碍物,且当小车在行驶或翻越障碍物时发生翻车现象的情况下小车也能正常行驶和继续弹跳,可大大地提高机器人的作业效率,对于复杂作业条件下机器人的发展和研究具有重要的意义。
1 运动员跨栏技术指标及可跳跃机器
跨栏跑是一项技术复杂、身体素质要求较高的短距离项目,其特点是跑跨结合,不仅要求速度快,且运动技术复杂。在平时训练时,可以使用标准可调节高度的运动器材进行训练,如图1所示。
跨栏质量的好坏主要同着地角度、支撑时间、起跨角度、起跨距离及下栏距离等相关。为了对数据进行充分的分析,将传统运动员的数据和刘翔的数据进行了对比,如表1所示。

图1 跨栏训练器具
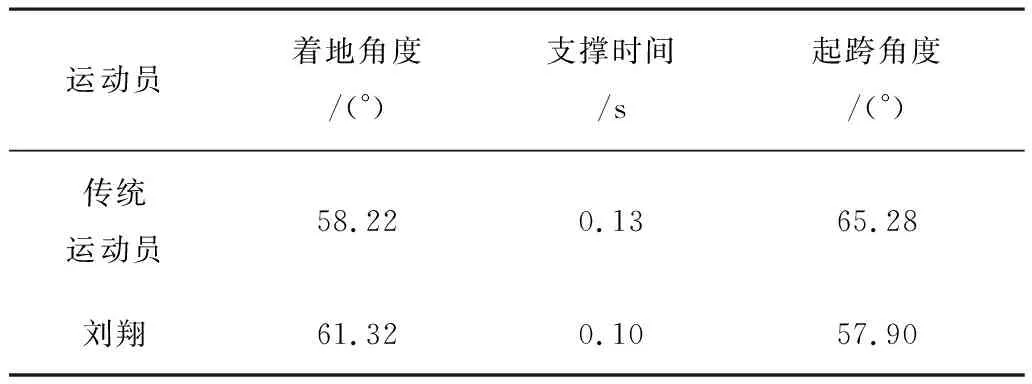
运动员着地角度/(°)支撑时间/s起跨角度/(°)传统运动员58.220.1365.28刘翔61.320.1057.90
通过起跳攻栏的技术动作可以看出:除了着地角度较大和支撑时间较小之外,刘翔的起跨角度更小一些,这使得跨栏身体中心腾空的高度更小一些,腾空的时间缩短,更加有助于快速地跨栏。
腾空过栏的动作技术指标如表2所示。图2中,中心水平位移和下栏距离的指标比较接近,而起跨距离不同,传统运动员要比较刘翔的大一些,从技术动作上分析,这有利于更好地跨越栏杆。
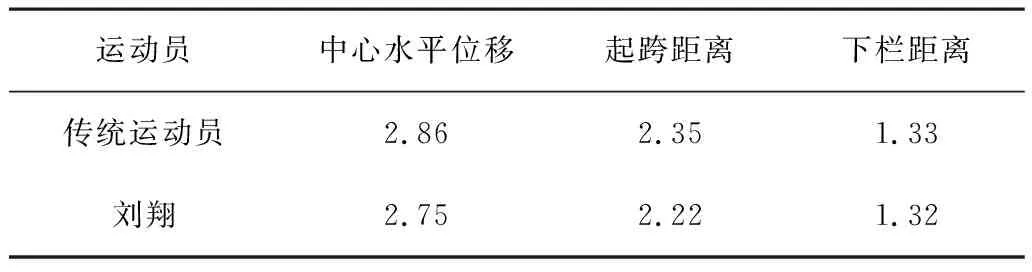
表2 腾空过栏的动作技术指标
将跨栏技术动作引入到跳跃机器人设计过程中,可以实现其一些设计参数的优化。图2是NASA喷气推进实验室构建的第1代跳跃机器人,其垂直跳跃高度可达80cm,水平跳跃距离可达30~60cm。

图2 NASA喷气推进实验室跳跃式机器人
2 自主跨越障碍跳跃式机器人设计
自主跨越障碍机器人在翻越障碍物时需要一个起跳装置,使采摘机器人的一部分先跨到障碍物上,然后实现翻越。目前的跳跃式机器人主要是有两种,一种是结构较为复杂的Acrobot结构,如图3所示。

图3 Acrobot结构示意图Fig.3 Object-field model of the system analysis before and after
图3结构和双钟摆的倒立形状类似,将可以旋转的部位作为起跳的动力来源。在进行跳跃时,机构通过加速使起跳部位逐渐脱离地面,其姿态可以通过θ角来控制,包括起跳前进速度、向前角度和遇到姿态。这3种关系是相互耦合的,因此在运动非常剧烈时不适用该方法。
基于这种结构,将θ角控制直接换成弹簧,然后采用单片机控制的方式实现自动起跳,有效地降低了结构的复杂程度,且可以提高控制精度。在对其起跳进行控制时,为了研究其特性,可以忽略外部环境影响干扰和重力作用,并对采摘机器人的控制进行反馈调节。根据采摘机器人的行走特性,其运动学方程可以表示为

(1)
其中,M为采摘机器人的实际质量;C为采摘机器人的刚度;q为位移;τ为反馈调节的参数。在采摘机器人运动控制系统中,qd∈Rn表示采摘机器人跳跃期望得到的位移值,其误差可以表示为
e=q-qd
(2)
采摘机器人在实际作业过程中,其定位和方向等误差可以通过GPS定位来实现,采用机器视觉来校准,利用PID反馈调节对误差进行校准。反馈调节方程为
(3)
其中,kp和kd表示调节系数。此时采摘机器人的动力学方程可以改写为

利用GPS定位和视觉导航两种方法,实时地调节采摘机器人沿着既定的方向行走,并翻越障碍物。为了使采摘机器人能够自主地翻越机器人,可以设置机器人的硬件驱动系统,实时地对误差进行调整,使机器人沿着既定期望的方向,如图4所示。翻越障碍物采摘机器以STC89C52单片机为控制核心,通过GPS定位和机器视觉实时对行进方向上是否有障碍物进行识别,并得到和障碍物的距离信息,利用核心处理器对信息进行处理后,发出控制信号,使机器人自主跳跃,并通过爬行越过障碍物,驱动力是由直接电机的PWM调速和步进电机产生的。软件控制流程如图5所示。
根据采摘机器人翻越障碍物时的运动轨迹和控制需求,系统的控制程序主要包括机器人控制主程序、障碍物检测主程序、翻越障碍物主程序,其子程序如图6所示。采摘机器人运动主程序需要完成对环境信息的采集及运动控制信息处理等;障碍物检测主程序主要是对障碍物的位置信息和距离进行实时监测,最后由翻越障碍物控制子程序发出指令,控制采摘机器人自主地完成翻越障碍物。

图4 翻越障碍物采摘机器人系统结构图
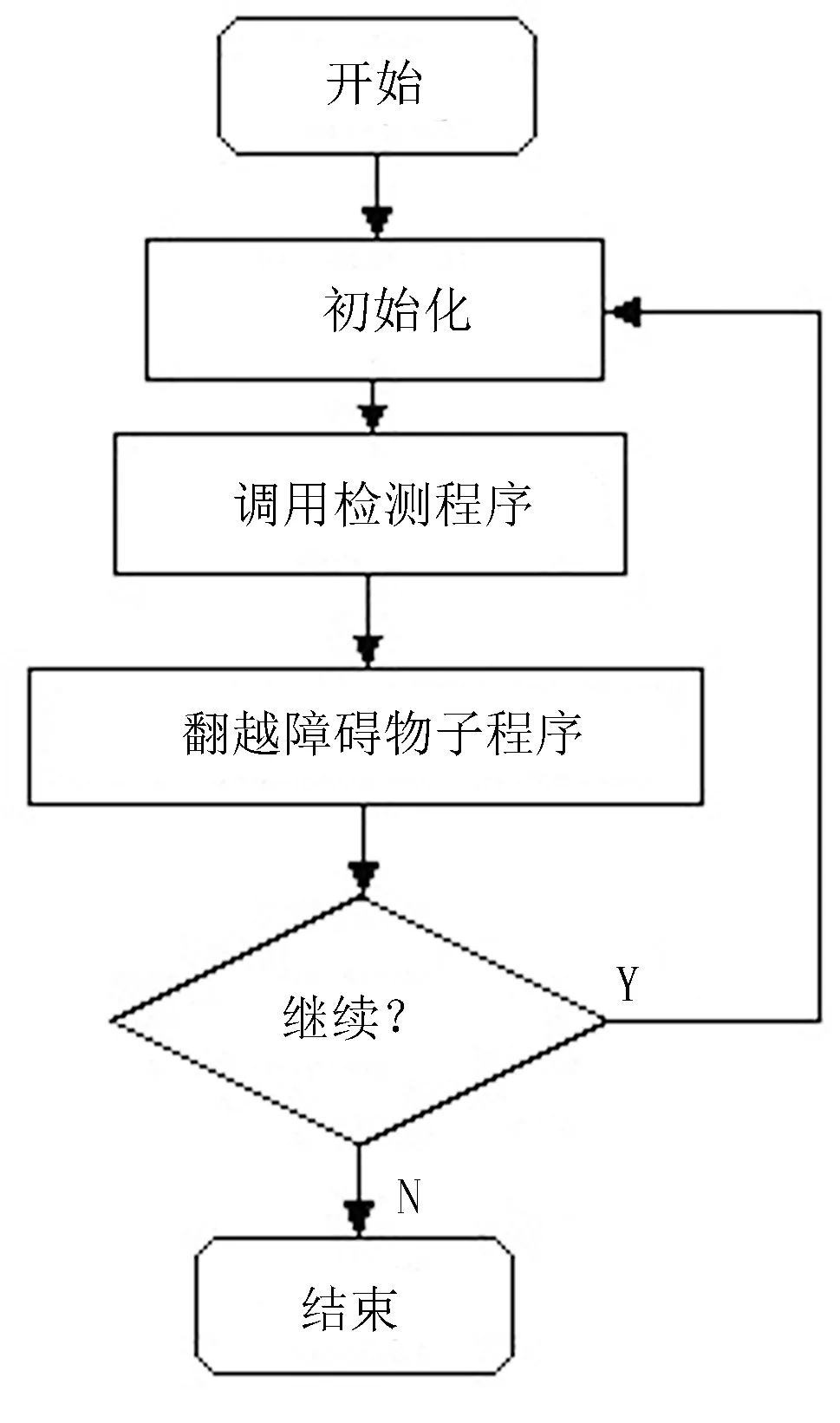
图5 采摘机器人翻越障碍物软件控制系统主程序

图6 采摘机器人翻越障碍物软件控制子程序
3 采摘机器人自主跨越障碍山地测试
为了验证跨栏摆腿动作技术在采摘机器人自主跨越障碍方案设计上的可行性,以跨栏技术动作为依据,对采摘机器人的跨越障碍物性能进行了测试。其中,起跳部分的结构如图7所示。
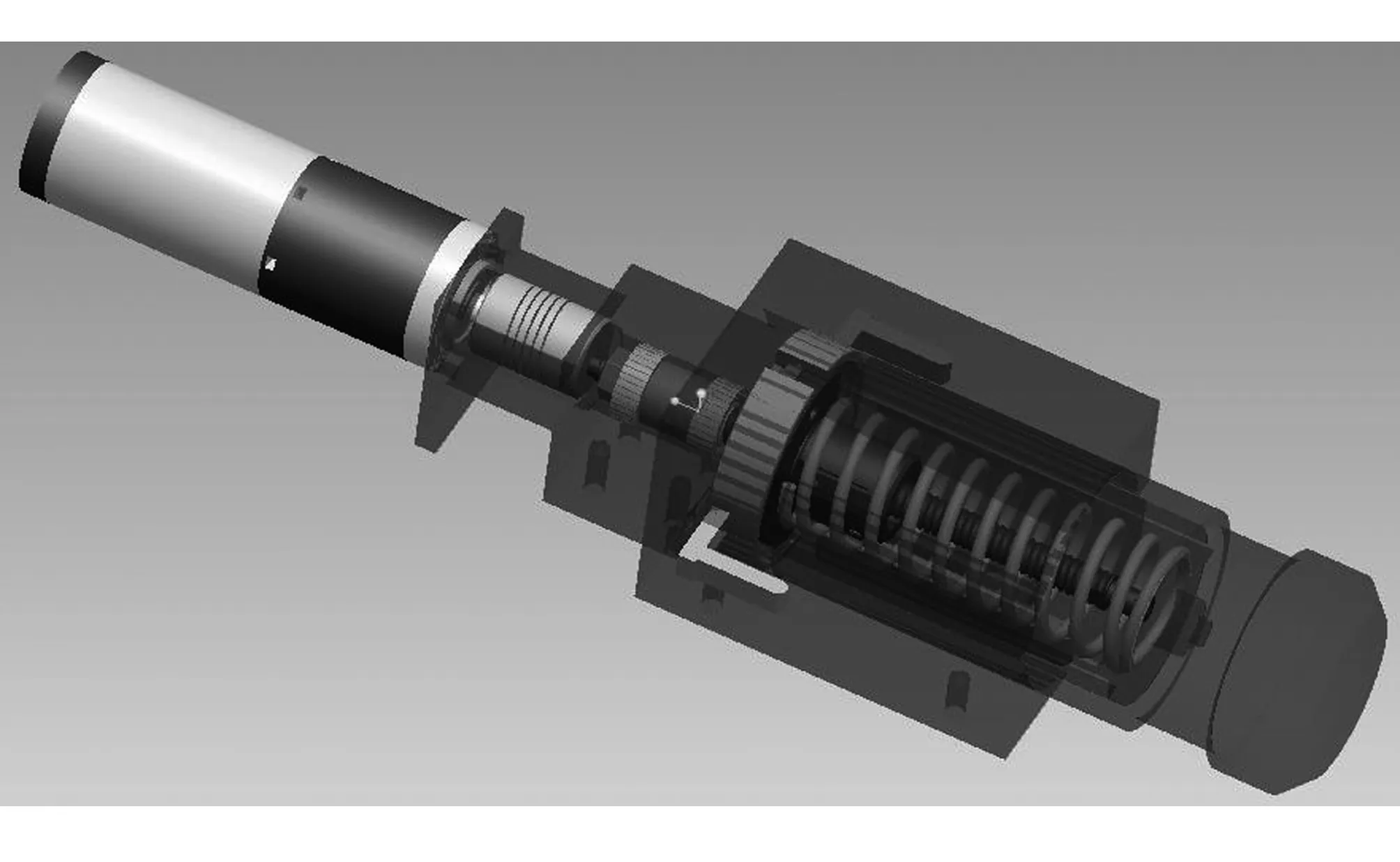
图7 机器人起跳部分机械结构
采摘机器人起跳的核心装置由单片机进行控制,当遇到障碍物时,弹簧会从压缩状态抬起,使机器人的行走机构越到障碍物上,如图8所示。当采摘机器人的行走装置越到障碍物上时,在电机的驱动下,机器人开始翻越障碍物。

图8 翻越障碍物示意图
为了验证采摘机器人在田间作业的性能,以山地果园区域为测试区域,对其性能展开了研究,如图9所示。该区域属于典型的地势不平坦的山区,采用传统的轮式机器人无法完成自主移动,而使用本次设计的采摘机器人可自主跨越障碍物,并成功地实现采摘功能。
对采摘机器人自主翻越障碍物的成功率及采摘成功率分别进行了测试,结果如表3所示。由图3可以看出:机器人翻越障碍物和成功采摘率都达到了90%以上,作业性能良好,可以满足山地采摘的需要。

图9 山地作业场景图
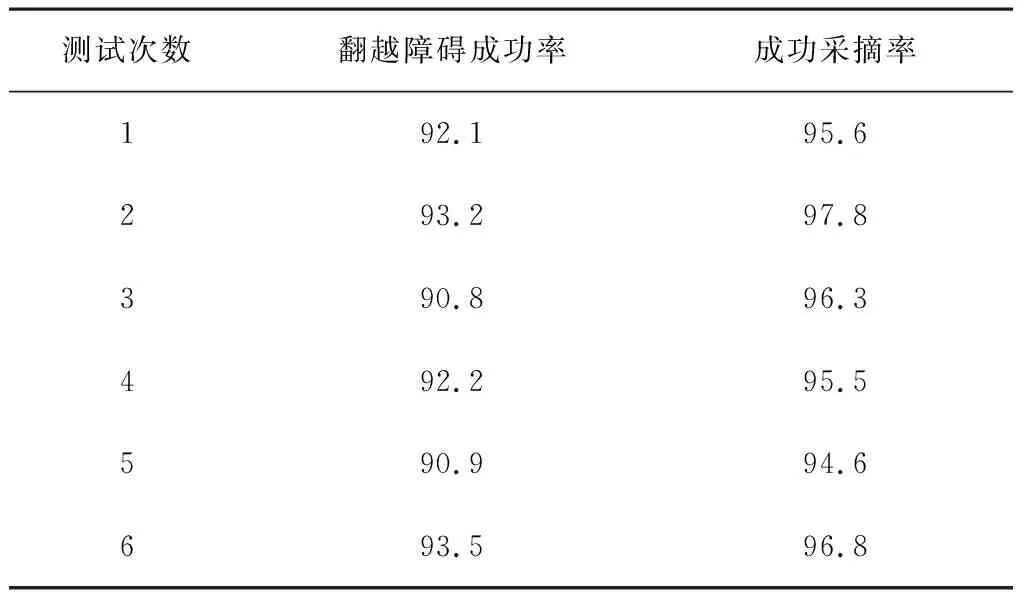
%
4 结论
为了提高采摘机器人自主翻越障碍物的能力,实现在复杂条件下的自主作业,将起跳弹簧装置引入到了采摘机器人的设计过程中,在单片机和电机的联合控制下,实现了机器人的自主翻越障碍物功能。对机器人的性能进行了测试,结果表明:采用传统的轮式机器人在山地采摘区域无法完成自主移动,而使用本文设计的采摘机器人可自主跨越障碍物,且成功采摘的概率较高。该采摘机器人具有单片机控制其行走、跳跃及探测等功能,且能够实现远程无线控制,具有广泛的应用前景。
