果园株间除草自动让树装置的设计
2018-08-10张宏文李光耀郭世龙刘秀每
王 磊,张 斌,张宏文,李光耀,郭世龙,刘秀每
(石河子大学 机械电气工程学院,新疆 石河子 832000)
0 引言
新疆林果业的快速发展为农业机械的快速发展提供了良好平台。果园中耕除草作业是土壤管理的基本环节,也是必不可少的环节之一。果园通过中耕除草作业具有许多优点:①有效改善土壤环境;②土壤结构得到改善,有利于土壤有机质的含量增加;③增加土壤水分的渗入;④提高土壤水分利用率;⑤降低生产成本,增加农民收入[1]。
实践证明:果园经过中耕除草作业之后,土壤中水分的蒸发减少了15% 左右,土壤有效持水约增加了33%[2],不仅可保护地表层,且对耕地物理、化学性能起到了有效作用,为果树的生长发育、增加林果产量、提高农民收入提供了有利条件。
我国对林果间的中耕除草作业主要采用旋耕机、弹齿耙等机械,这些机械具有较强的切土能力和较好的碎土能力,作业时不必担心会对土壤深层结构造成破坏,且作业之后地表比较平整、松碎,达到了精耕细作的农业要求[3]。但是,果园中耕除草作业和普通大田作业截然不同,在普通大田中作业时,机具可以宽幅、循环作业,而不必考虑作物对中耕机械的影响;在果园中作业时,果树则成了中耕机械前进的障碍物。由于果树对机具的影响,通用弹齿耙、旋耕机[4]在林果间作业时,有时为了避让果树根茎,造成果园中株距之间的区域无法耕作,形成了漏耕现象,需要人工进行二次作业,增加了劳动成本,降低了劳动生产率。根据以上问题,现在农民大多选用微耕机进行果园作业[5],因为微耕机可以通过一次耕作完成对果树株间、行间作业;但是,目前的微耕机比较笨重,操作比较困难,且劳动强度非常大、耕作质量相对较差,耕作效率较低[6],需要投入大量的人力物力,不适应在新疆果园中作业,反而制约了新疆林果业机械化作业发展的速度。
实现果园精确作业的自动让树除草机械在我国处于刚起步阶段,且投入市场的相关机型非常少。因此,设计一种能与新疆果园种植模式相适应的果园株间自动让树装置,对减少人力和物力资源的浪费、提高劳动生产率和果园机械化作业水平、实现新疆果园生产机械化具有现实意义。
1 整机结构与参数
1.1 整机机构
果园株间除草机由让树装置、弹齿耙、动力系统、主梁、调节弹簧及刀托等组成,如图1所示。行间除草装置弹齿耙分为前后两组,分别安装在主机架前后的两个主梁上,并借助于机架主梁、螺栓及弹簧拉杆固定到机架上;株间除草装置安装于机架的一侧,也可同时安装在机架的两侧,主要用于除去株间杂草,这是一般除草机械所不具有的;机械感应触杆由钢筋折弯所制,作用是测量除草刀具与果树之间的距离,从而控制液压阀进行换向,保证除草刀具能够安全避开果树或障碍物,从而保证除草刀具能够快速、高效的果园作业。

1.让树装置 2.弹齿耙 3.限深轮 4.悬挂架 5.前梁 6.弹簧 7.加强筋 8.主梁 9.刀托 10.V型块
1.2 果园株间自动让树装置的工作原理
果园株间除草装置作业时,若机械感应触杆没接触到果树或者障碍物时,此时株间除草装置宽幅作业,且液压系统不工作;若机械感应触杆接触到果树或者障碍物,此时机械感应触杆受力弯曲并绕轴旋转,在转动过程中压力控制阀因受力而做出响应,使液压控制系统工作,进而控制液压缸进行伸长或收缩运动,从而控制让树装置沿与机具前进垂直方向旋转,株间除草装置改变作业路径,避免了除草刀具损伤果树和障碍物对刀具的磨损。当株间除草刀具让树工作结束后,由于机械感应触杆所受的外力消失,机械感应触杆将回到最初位置,作用在压力阀上的外力减少,促使液压系统控制液压缸收缩或伸长运动;让树装置避障结束后,除草装置进行宽幅作业,如此往复循环作业。果园株间除草装置能有效避免了自走式一般除草机械少耕、漏耕现象,有利于作物的生长,提高了果园全过程机械化作业效率。让树装置具体工作原理如图2所示。
1.3 自动让树装置调整机构的设计
自动让树装置调整机构不仅是除草刀具的主要支撑部件,而且可通过液压缸的伸缩来调整除草刀具的耕作深度,以适应不同地质的土壤。除草刀具通过刀轴固定在调节机构上水平板和调节机构下水平板上,刀具安装板由液压缸铰接板、调节机构安装板、调节机构上水平板、调节机构下水平板、U型卡槽、调节机构平板、销轴、合页、安装板及调整机构连接板等部件组成。株间自动让树装置调整机构如3所示。本装置设计应满足以下要求:①结构简单可靠,安装方便,保证耕作质量要求;②整体结构稳定性能好,尽可能减少耕作过程中产生的机具振动;③除草刀具安装板与机架联接应简单、可靠,采用1对V型夹板用螺栓固定;④除草刀具的耕作深度便于调节,以适合不同地况的耕作要求,提高了果园机械式除草效率。

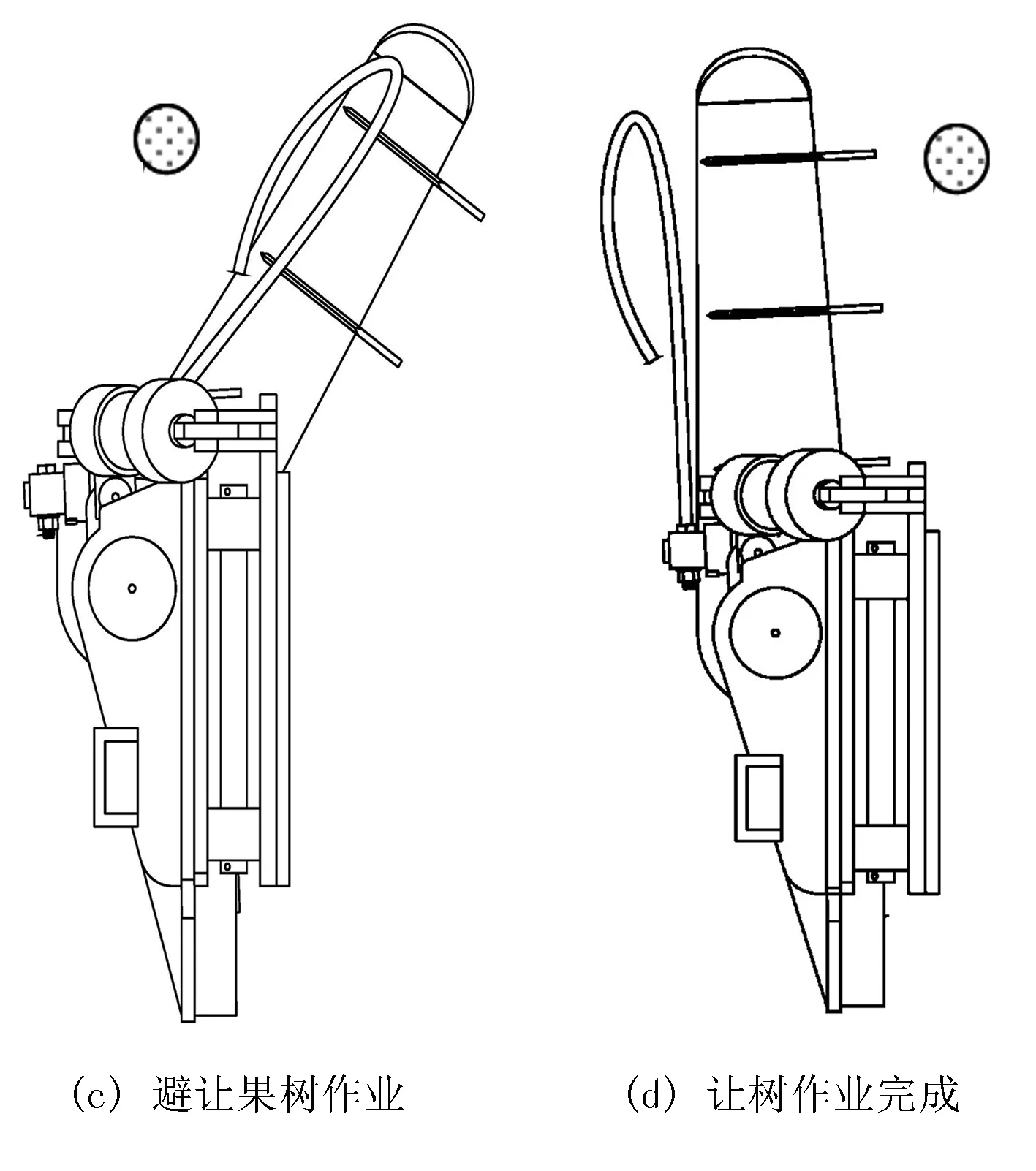
图2 让树工作原理图

1.液压缸铰接板 2.调节机构安装板 3.调节机构上水平板 4.调节机构下水平板 5.U型卡槽 6.调节机构平板7.销轴 8.合页 9.安装板 10.调整机构连接板
2 果园株间自动让树装置液压系统的设计
2.1 液压系统的方案设计
1)液压缸的外载负荷分析。果园株间自动让树装置在果园中耕作业时,液压缸带动除草刀具自动让开果树或障碍物,机架和自动让树装置的总质量为450kg。由于果园株间自动让树装置让树动作时间较短,因此整个让树装置过程可以看作是除草刀具做匀速旋转进行株间除草作业。液压缸所承受的负载主要是克服除草刀具切割土壤时所产生的工作阻力Ff,其计算公式为
Ff=(1+a)(Ff1+Ff2)
其中,Ff1=μ1m1g,μ1为刀具与土壤间的摩擦因数,m1为自动让树装置总质量;Ff2=μ2m2g,μ2为土壤与土壤间的内摩擦因数,m2为 土壤的总质量。
2)液压回路的方案设计。果园株间自动让树装置液压系统一般为农用机械中的简单中低压系统,要求液压缸的动作迅速且流量较大,又因为液压阀组换向和控制精度不高,因此选用齿轮泵作为液压系统的动力元件,给中低压提供大流量的液压油,进而完成执行元件的动作。
3)液压系统方向控制方案设计。此系统为中低压系统且流量较大,机械感应触杆控制液压阀组,因此要求阀组要用机动控制,又考虑到机械感应触杆工作形式有不碰果树和碰到果树两种状态,而相应地仅能控制液压阀组产生1次执行动作,因此本方案采用两位两通换向阀来满足上述功能。
4)背压和安全保护。为了保证株间自动让树装置在进行换向时降低液压冲击,在回油路上设计了平衡阀来增加背压,起保护作用,且在泵的出口设有溢流阀作为系统调压与安全保护作用。
5)辅助回路方案设计。为了保证液压油的清洁度,在液压泵入口处设有吸油过滤器;为了更好地观察各阀组调压时的变化,因此在液压泵的出口处设有压力表。
根据上述液压系统的设计,最终液压系统工作流程图如图4所示。
2.2 液压泵所需最大工作压力
果园株间自动让树装置的让树动作是液压缸驱动液压油缸铰接板绕轴旋转。在果园中耕作业时,机械感应触杆碰到果树或障碍物,此时弹簧卡板会触发形成开关,液压系统工作。在此过程中,液压系统所需的最大压力在自动让树装置让树结束复位时,即为液压缸收缩时所克服的外界负载压力,其最大工作压力计算公式为
Pp≥P1max+∑Δp
其中,P1max为液压缸最大工作压力,取P1max=17.82MPa;Σ△p为液压管路工作过程压力损失之和,简单液压系统为0.2~0.5MPa。
对于复杂液压系统,压力损失之和为0.5~1.5MPa。本设计液压系统属于一般简单系统,因此取压力损失之和为0.3MPa[7]。
由上式可计算出液压泵在工作时所需的最大工作压力为
Pp≥P1max+∑Δp=18.12MPa

1.液压泵 2.过滤器 3.液压油箱 4.液位器 5.直动溢流阀 6.二位四通电磁换向阀 7. 液压缸 8.平衡阀图4 液压系统
2.3 液压泵最大流量计算
果园株间自动让树装置在果园中耕作时系统产生最大流量的时刻为液压缸动作时,根据公式可得液压泵工作时的最大流量为
qp≥K(∑Δq)max
其中,(Σ△p)max为液压缸工作时所需的最大流量,取(Σ△p)max=108mL/s;K为液压系统的泄漏系数,一般K=1.1~1.3,若流量大取最小值,反之取大值。本设计液压系统为小流量液压系统[8],故取K=1.1。
由上式可得液压泵最大流量为
qp≥K(∑Δq)max=18.8mL/s
2.4 液压泵规格的确定
根据液压系统所需的流量及液压泵的排量,其参考值公式为[9]

2.5 液压系统的模型建立
根据液压系统的工作原理图,利用AMESim软件建立果园株间自动让树装置液压系统的虚拟模型,如图5所示。

图5 液压系统仿真模型
依据果园株间自动让树装置液压系统的仿真模型,对液压系统进行仿真分析,可获得液压系统的仿真结果分阶段信号、液压缸流量仿真曲线、液压的速度曲线及液压缸的位移仿真曲线,如图6~图9所示。

图6 分阶段仿真信号
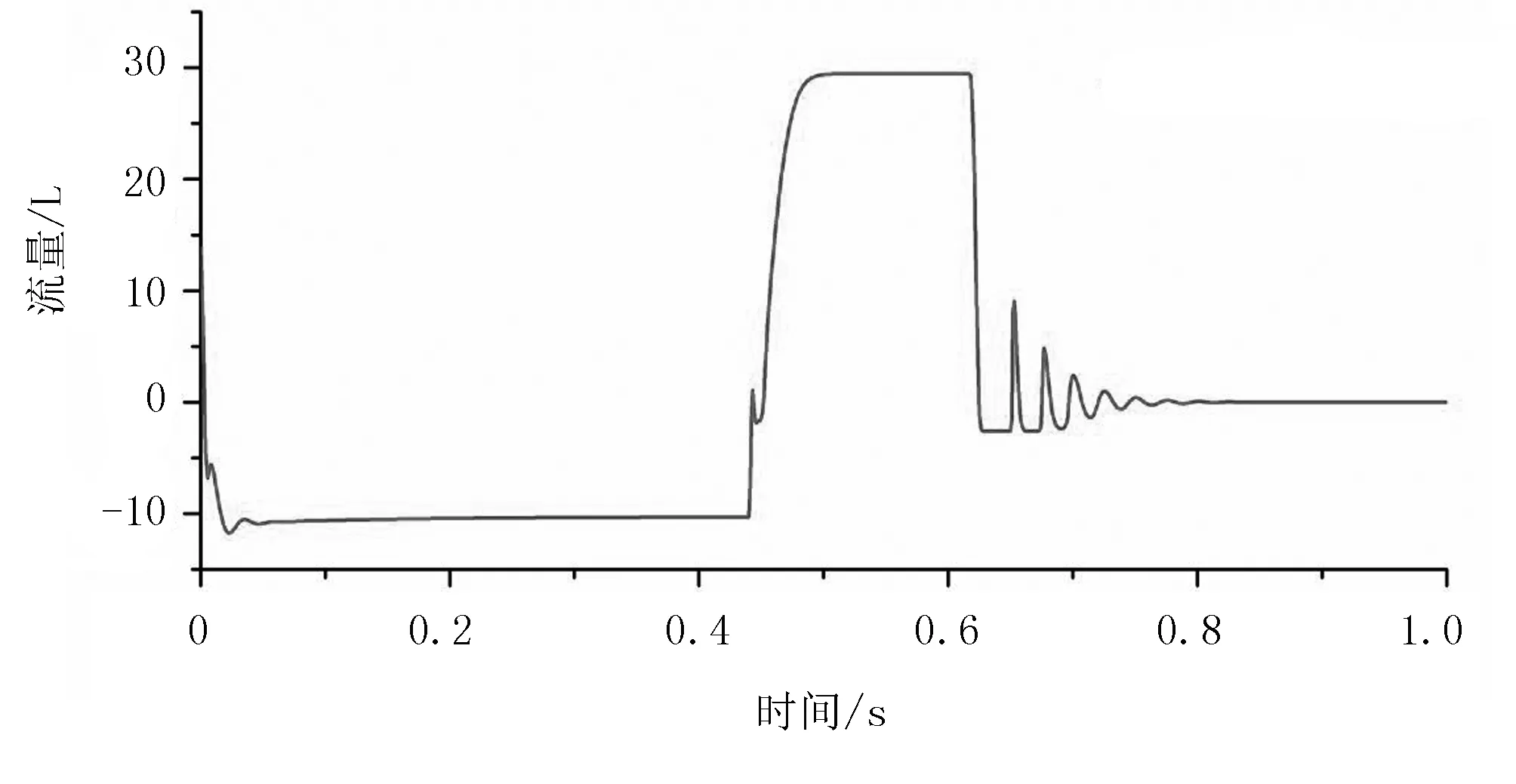
图7 液压缸流量仿真曲线

图8 液压缸速度仿真曲线

图9 液压缸位移仿真曲线
由仿真结果可得:为了保证液压缸的初始状态为收缩状态,在0~0.44s时间段内为刀具接触果树或障碍物让树过程;0.32~0.5s让树过程结束之后为刀具复位过程。由图7与图8可知:液压缸收缩速度为1.08m/s,液压缸流量为11 L/min,持续作业时间为0.44s;让树动作结束之后,液压缸的伸出速度为2.26m/s,液压缸流量为27L/min,持续作业时间为0.2s。由图9可知:在整个让树过程中,液压缸的位移曲线平滑且无较大的波动,可以有效地防止液压缸活塞与底座的冲击、挤压,同时验证了液压缸行程的合理性与仿真模型建立的正确性。
3 田间试验
为了检测果园株间自动让树装置在果园间的工作性能,以级为进一步结构优化提供理论依据,对田间试验所测到的数据与理论设计计算获得的数据进行分析、比较,来检验和优化结构设计。
3.1 试验内容
试验的主要内容包括:果园株间自动让树装置在不同作业速度下的耕作深度、漏耕率、让树通过率及让树系统在工作时的稳定性,如表1所示。
表1 果园株间自动让树装置耕作性能指标
本次试验在阿克苏农一师农场完成,试验选取农用配套拖拉机X804,田间试验全过程如图10所示。

图10 果园株间自动让树装置田间试验过程Fig.10 Procedure of filed test using automatic setup
3.2 试验结果与分析
试验中采用拖拉机慢Ⅳ档进行田间耕作,前进速度为5.5km/h。果园株间自动让树装置各项试验结果如表2~表4所示。
1)耕作深度测定。每次取10个点作为测量点,测量结果如表2所示。

表2 果园株间自动让树装置耕深性能测定结果

续表2 cm
由表2计算可得:果园作业平均耕深a=7.55cm,耕深平均标准差S=0.71,变异性平均系数V=9.36%,稳定性平均系数U=90.64%。
2)果园漏耕率及让树通过率测量结果如表3和表4所示。
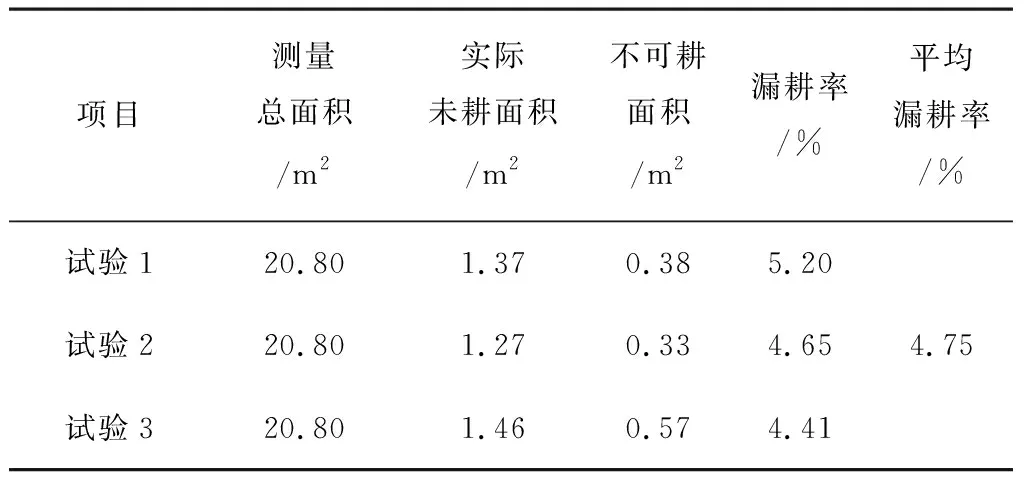
表3 果园漏耕率测量结果

表4 果园让树通过率测量结果
表3、表4中数据表明:果园株间自动让树装置在果园间作业时,漏耕率为4.75%,满足本设计要求;让树通过率为100%,工作时系统稳定性、可靠,满足设计要求。
4 结论
根据新疆果园采用矮化密植的园艺种植模式,设计了一种与新疆大规模果园种植模式相匹配的株间除草装置,能够对株间精确作业,同时解决了果园机械化作业时产生的漏耕现象,避免了人工二次补耕等问题,对新疆果园实现机械化作业具有现实意义。