激光测控深松机设计与仿真分析
2018-08-10王春辉弋景刚刘江涛孔德刚袁永伟
王春辉,弋景刚,刘江涛,孔德刚,袁永伟
(河北农业大学 机电工程学院,河北 保定 071001)
0 引言
土壤通过深松耕作后,不仅可以打破由于多年的传统耕作所形成的坚硬犁底层,而且深松后耕层土壤形成一个上虚下实、左右虚实相间的土体结构[1]。耕层土壤的松散结构可以起到蓄水、保墒、储存肥料等作用。农田地表复杂,存在坑洼或斜坡,拖拉机在田间作业时容易发生倾斜行走,因此在深松作业时很容易使深松沟的深度随地表坑洼或斜坡变化导致深松沟犁底层不水平[2]。犁底层作业面保持水平,可提高蓄水均匀性。
为实现深松作业时犁底层始终水平,结合激光控制、电气控制、液压技术对深松机进行了改进设计,改进设计后的深松机在深松作业时始终保持犁底层水平。本文建立了限深轮与土壤接触的数学模型及限深轮与深松机的数学模型,并对激光测控深松机整机进行Amesim、Adams、Simulink三者的联合仿真,为后续的物理样机制造提供了设计参数。
1 整机主要结构设计及工作原理
1.1 整机主要结构设计
深松沟底犁底层位置主要取决于限深轮位置,在原有深松机基础上加装实时控制的液压限深轮,通过实时控制液压限深轮的位置来保持深松机始终处于水平位置。整机结构如图1所示。图1中,两个固定轴套固定在深松机架的两侧,两个平行连接滑动轴穿过固定轴套,在两平行连接滑动轴的两端分别安装限深轮和液压活塞杆,液压缸体固定于深松左右两侧。
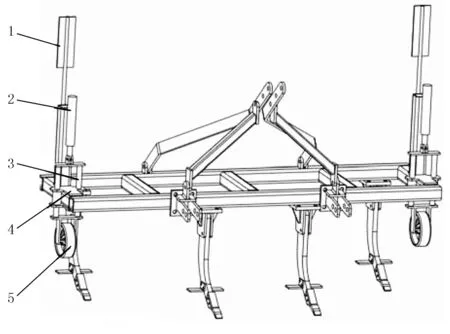
1.激光位置接收器 2.水平调节液压缸 3.连接滑动轴 4.固定轴套 5.限深轮
1.2 水平工作原理
拖拉机悬挂处于浮动状态,深松深度由限深轮决定。激光发射器在农田上产生一个激光水平面,作为深松沟犁底层的水平参考基准面。当农田地表横向凹凸不平时,在横向位置深松机倾斜θ同时重心下降h,左右激光位置接收器偏离各自原来位置△h1和△h2,如图2所示。左侧液压缸需要收缩长度△l1,右侧液压缸需要收缩长度△l2,两侧位置偏差信号发送给控制器,控制器根据偏差信号发送信号使电磁阀动作控制液压缸伸出或收缩量使整机调回水平位置,如图3所示。其中,左右油缸伸缩量△l1、△l2与偏离位置 △h1、△h2、h、倾斜角度θ存在如下关系,即
(1)
(2)
(3)
若倾斜角度θ在±5o之内,则
△l1≈△h1
(4)
△l2≈△h2
(5)
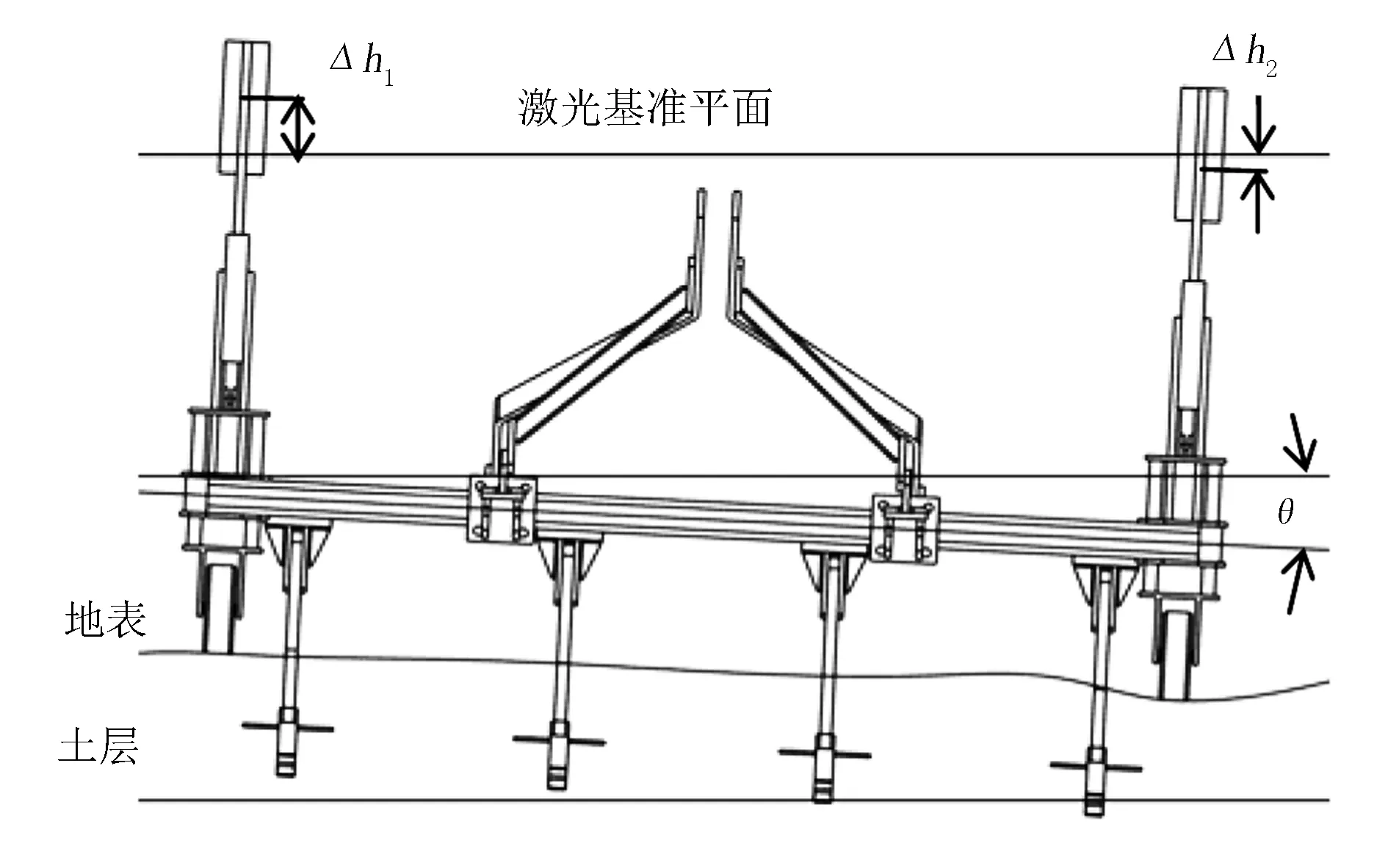
图2 深松机倾斜状态图
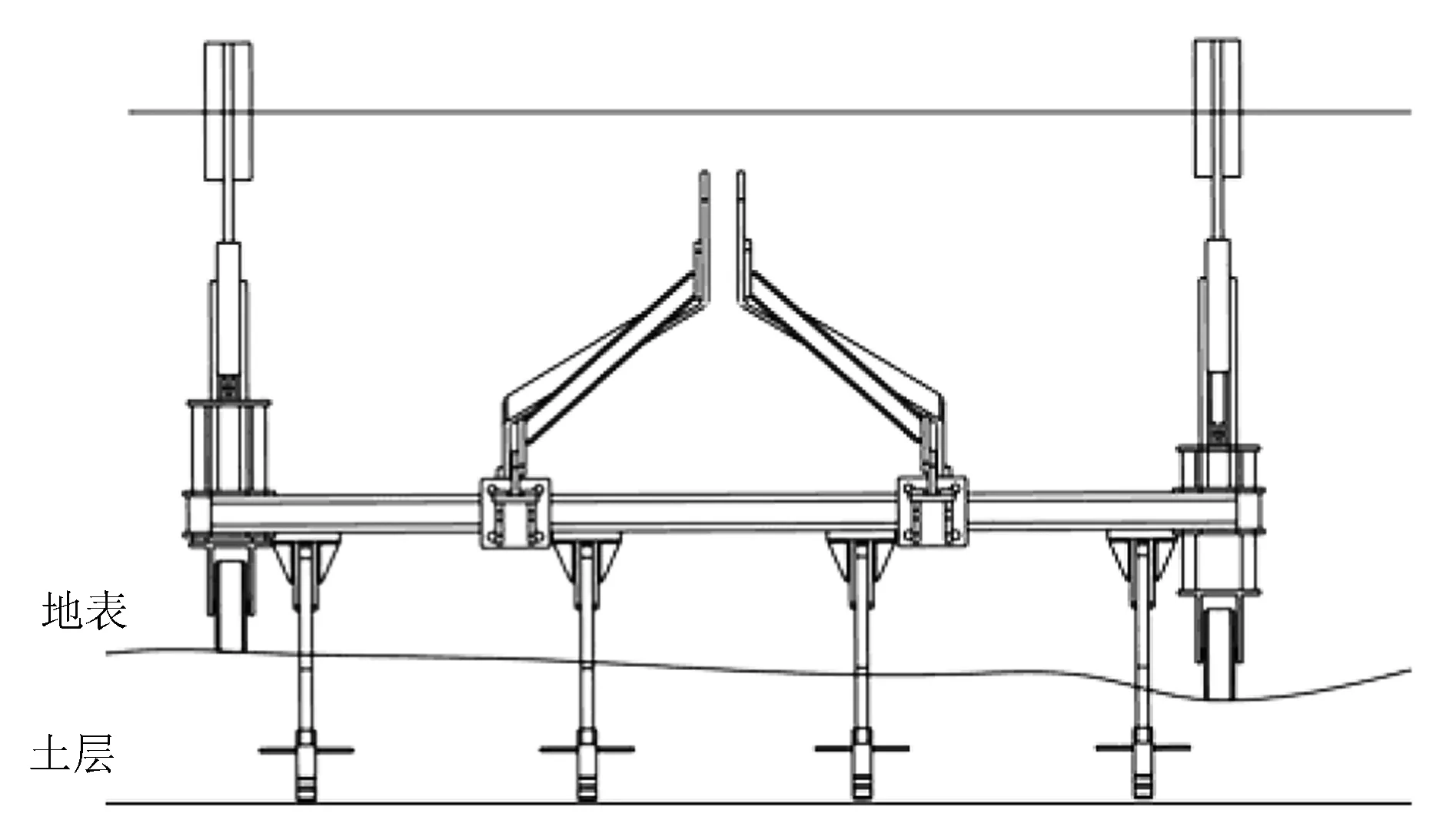
图3 深松机水平状态图
左右两个限深轮相互独立调节,简化了控制难度。 系统输入电流Is,输出激光接收器中心偏离激光基准面距离h。此系统由4个环节构成,分别为电磁阀换向-水平调节液压缸、限深轮伸缩调节、深松机左右调节、激光接收器中心偏离激光基准面距离。电磁阀输入电流Is输出液压流量Q,流量Q输入到水平调节液压缸,水平液压缸输出速度V,速度V驱动限深轮伸缩ΔL,深松机左右两端上下运动输出最终的激光接收器中心偏离激光基准面距离h。其物理系统框图如图4所示。
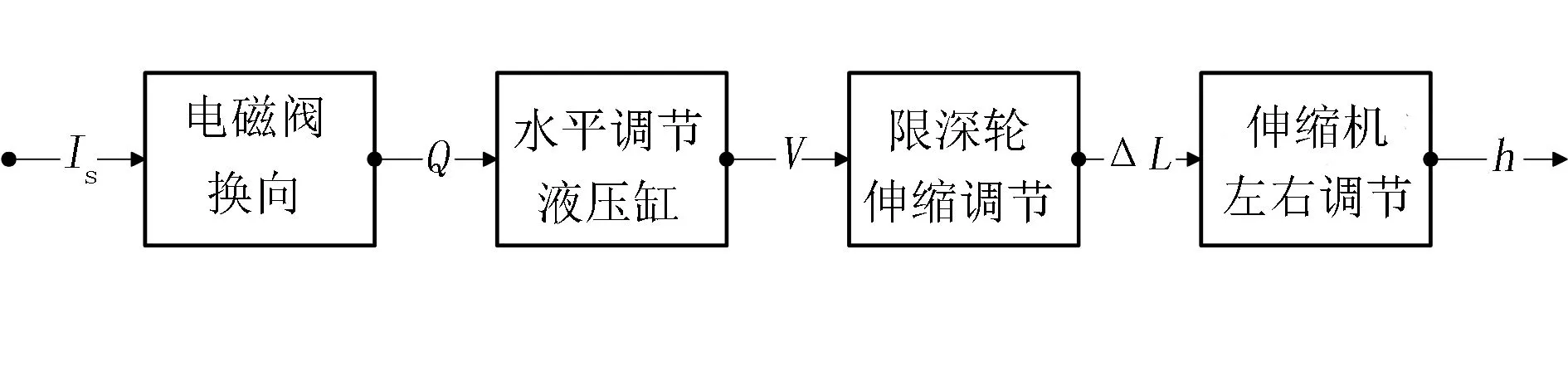
图4 物理系统框图
2 土壤-限深轮-液压缸数学模型的建立
2.1 限深轮-土壤接触数学模型的建立
在建立限深轮-土壤之间的模型前,假设液压限深轮结构始终垂直作用于土壤。农田土壤在深松或旋耕之前,具有一定的紧实度,因此可采用Adam D.和Kopf F.弹塑性土壤模型。在土壤的弹塑性模型中,塑性系数ε和阻尼塑性比例γ可表示为[3]
(6)
其中,ksp为塑性土壤刚度(N/m);kse为弹性土壤刚度(N/m);Cse为弹塑性土壤阻尼(N·s/m)。
假设在深松作业时限深轮始终竖直作用于土壤,单侧限深轮与土壤接触模型如图5所示。

图5 限深轮接触模型图
图5中:x0为整机竖直方向位移;xs为限深轮竖直方向位移;xse为土壤弹性变形;v为限深轮运动方向;q1、q2分别为液压缸输入输出流量(忽略液压缸泄漏)。
限深轮对农田地表只存在一次压实作用,压实的土壤经深松机深松后塑性刚度和弹性刚度有所减小,塑性系数减小和阻尼塑性比例增大。根据Kordestansi A 给出的振动运动三级微分方程可推导出限深轮与土壤的运动微分方程为[3]

Fs=A(p1-p2)
(9)
(10)
式中Fs——液压缸输出力;
p1——液压缸上腔压力;
p2——液压缸下腔压力;
A——活塞有效面积;
ms——限深轮结构活塞杆总质量。
2.2 限深轮-深松机位置方程建立
深松机与限深轮结构之间存在相对运动,深松机上下调节动作时,限深轮也存在伸缩运动,两者运动通过液压缸进行耦合,其满足的关系式为
(11)
(12)
(13)
(14)
式中V1——上腔油与液压缸内液压油体积;
V2——下腔油与液压缸内液压油体积;
βe——液压油有效体积弹性模量;
md——液压缸体质量;
me——深松机质量。
3 联合仿真分析
3.1 整机三维模型的建立
在Pro/E中建立联合仿真分析的三维模型,如图6所示。将模型以STP格式导入到Adams/View中。
3.2 Adams模型输入输出变量设置
Adams具有很强的运动学与动力学仿真分析能力,利用Controls模块可实现联合仿真分析[4]。在实现联合仿真之前,首先需要对导入的Adams中的模型添加材料属性在定义的材料中除了接触的土壤为自定义之外,其余材料全部定义为steel;其次根据各个构件的运动关系建立约束,建立好的模型约束,如图7所示。土壤模型参照某农田平整度样本拟合得到。
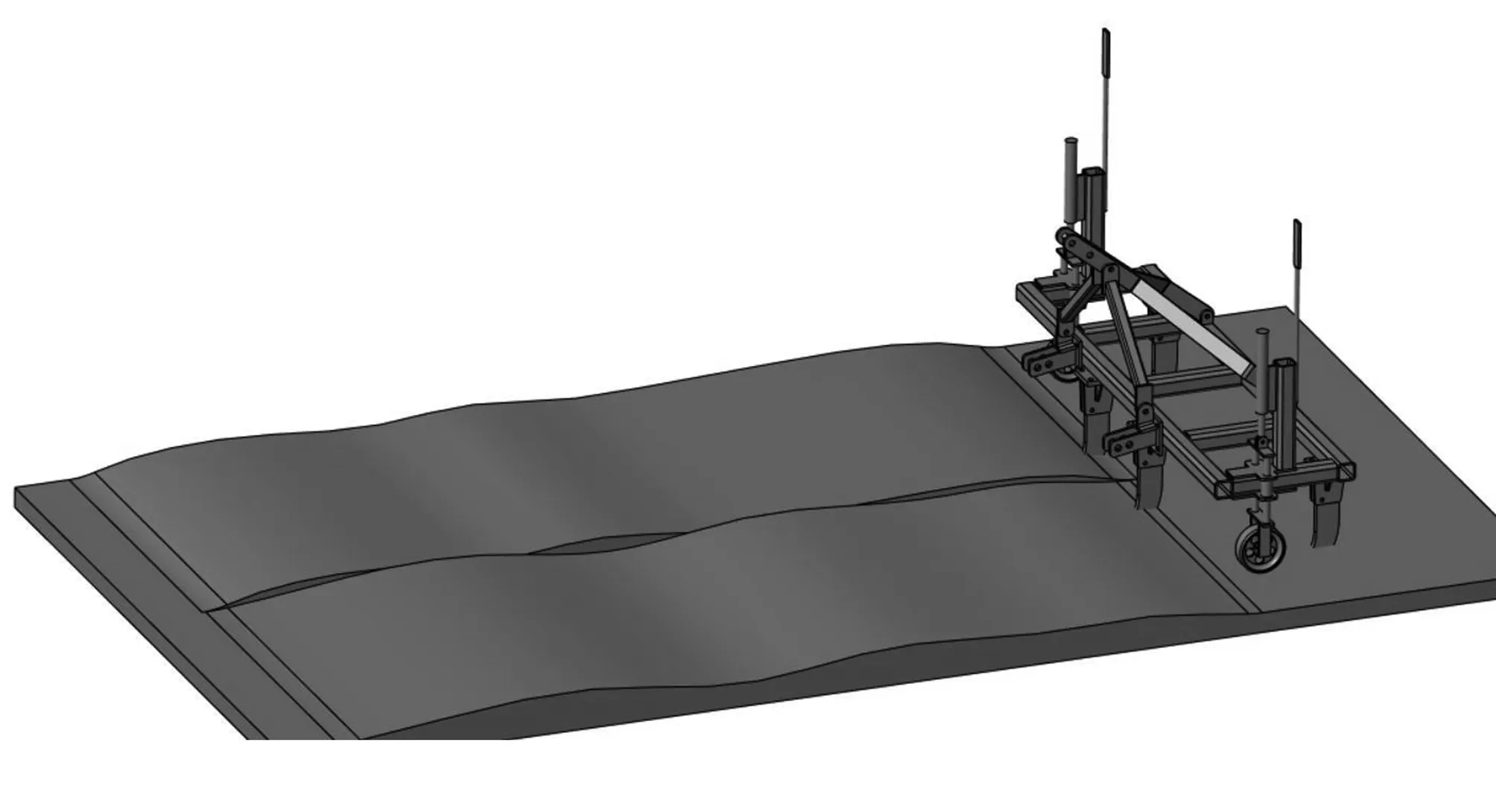
图6 联合仿真三维模型
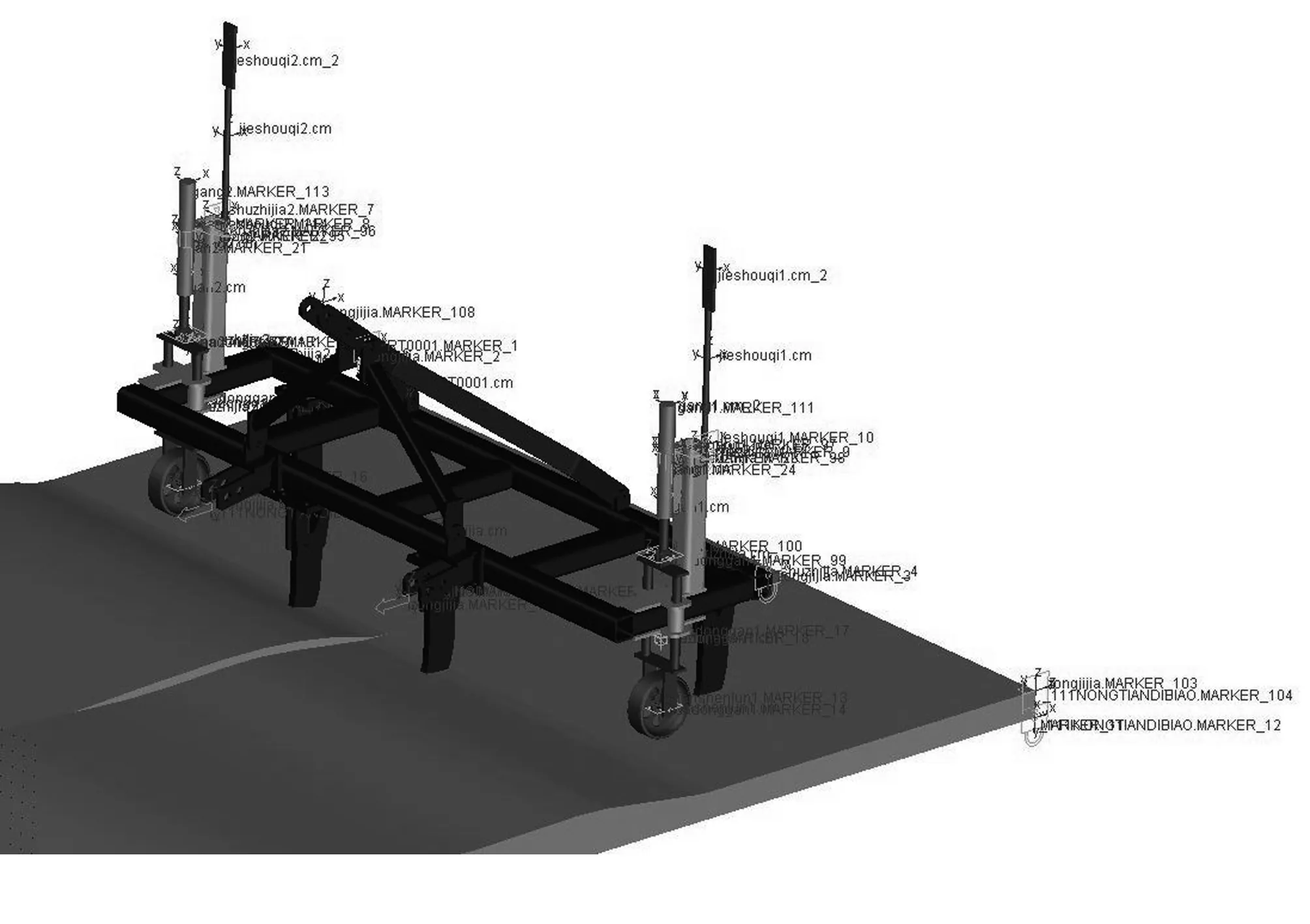
图7 联合仿真约束模型
Adams与其他程序之间的数据交换是通过状态变量实现的,联合仿真前需要明确系统的输入输出状态变量[5]。激光测控深松机的机械系统输入控制量为左右两个液压缸速度和模型行进速度,输出状态量为深松机左右两侧激光接收器相对于地表模型的垂直位移及左右两个液压缸活塞杆受到力。利用Adams/Control模块将输入输出状态变量生成Matlab可执行文件。
3.3 Amesim液压系统联合仿真模型的建立
Amesim软件采用能量端口的建模方法,可代替液压系统,为实际液压系统设计提供重要参数[6-7]。本液压系统特点如下:采用回油节流调速能承受一定的负值负载,防止液压缸出现突然的窜动;利用电磁换向阀的O型中位机能实现锁紧;两个液压缸共用同一个液压源。建立的液压系统仿真模型如图8所示。在联合仿真接口图标中,模型的输出为左右两个液压缸的速度变化,模型的输入为外界施加在两个上液压缸的作用力和左右两个电磁阀的电流,以及液压泵的转速[8]。
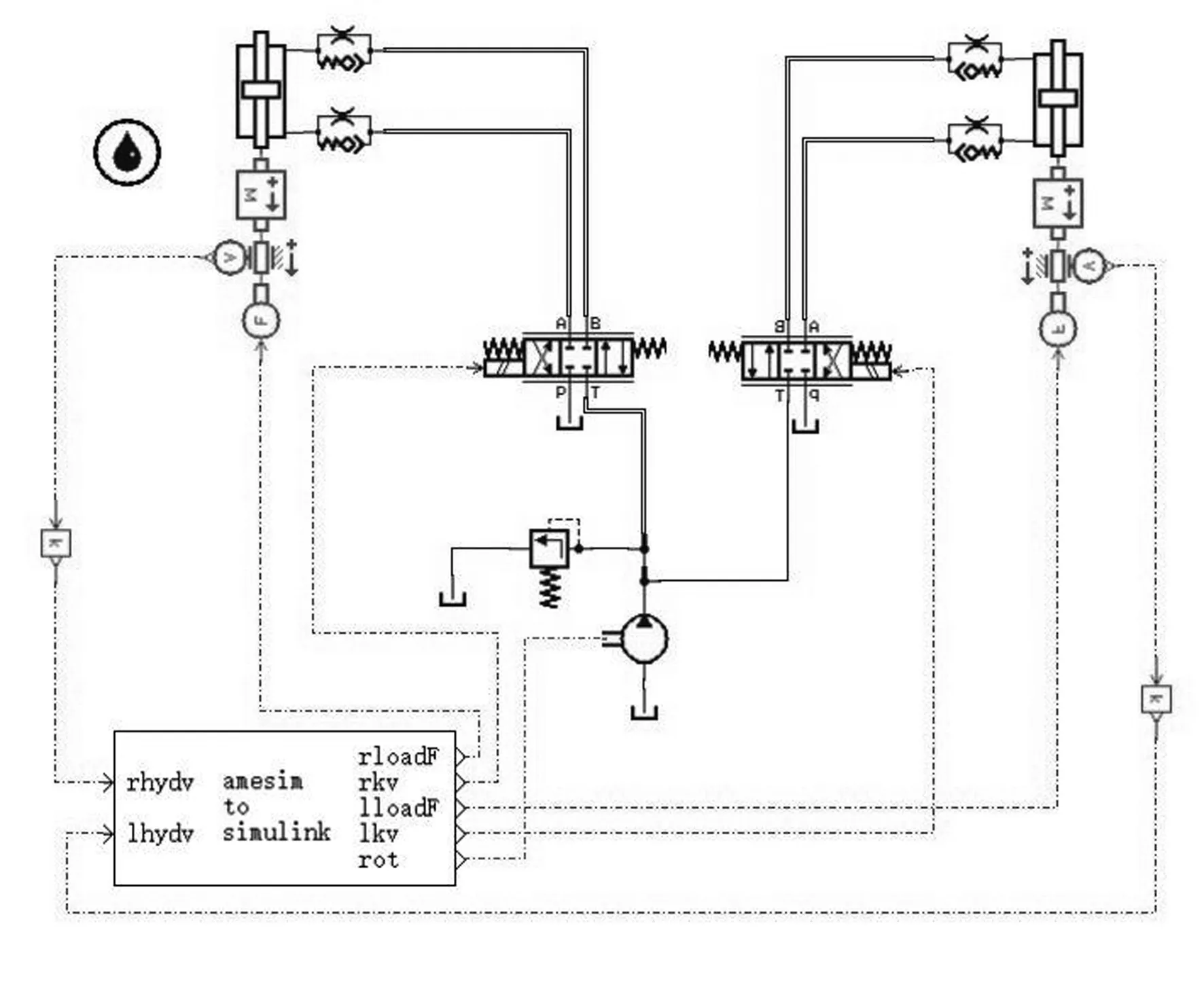
图8 液压系统仿真模型
3.4 Adams、Amesim与Simulink联合仿真
在Amesim中启动接口模型,程序将自动启动Simulink,在Simulink中将Amesim液压系统模型导入;在MatLab命令窗口启动Adams模型,将Adams机械模型导入 ,此时Simulink中拥有了Adams和Amesim两个接口模型;根据激光测控深松机工作原理,利用Simulink模块建立控制系统。本文Adams、Amesim与Simulink联合仿真框架如图9所示[8],联合仿真模型如图10所示。
3.5 仿真结果分析
仿真设置时间为10s,仿真过程中激光接收器深松机左右两侧激光接收器相对于地表模型的垂直位移如图11所示。
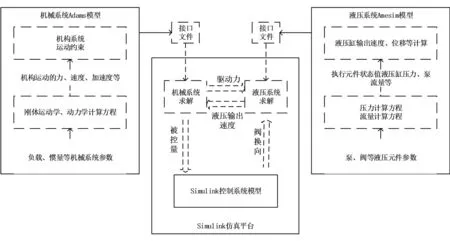
图9 联合仿真框架图
建立的3软件联合仿真模型如图10所示。
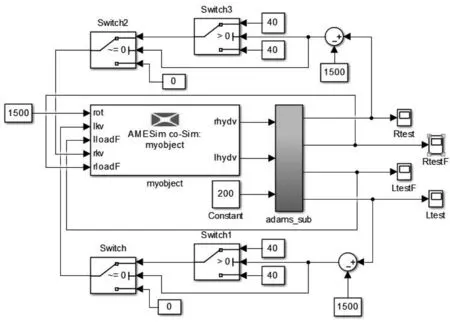
图10 3软件联合仿真模型
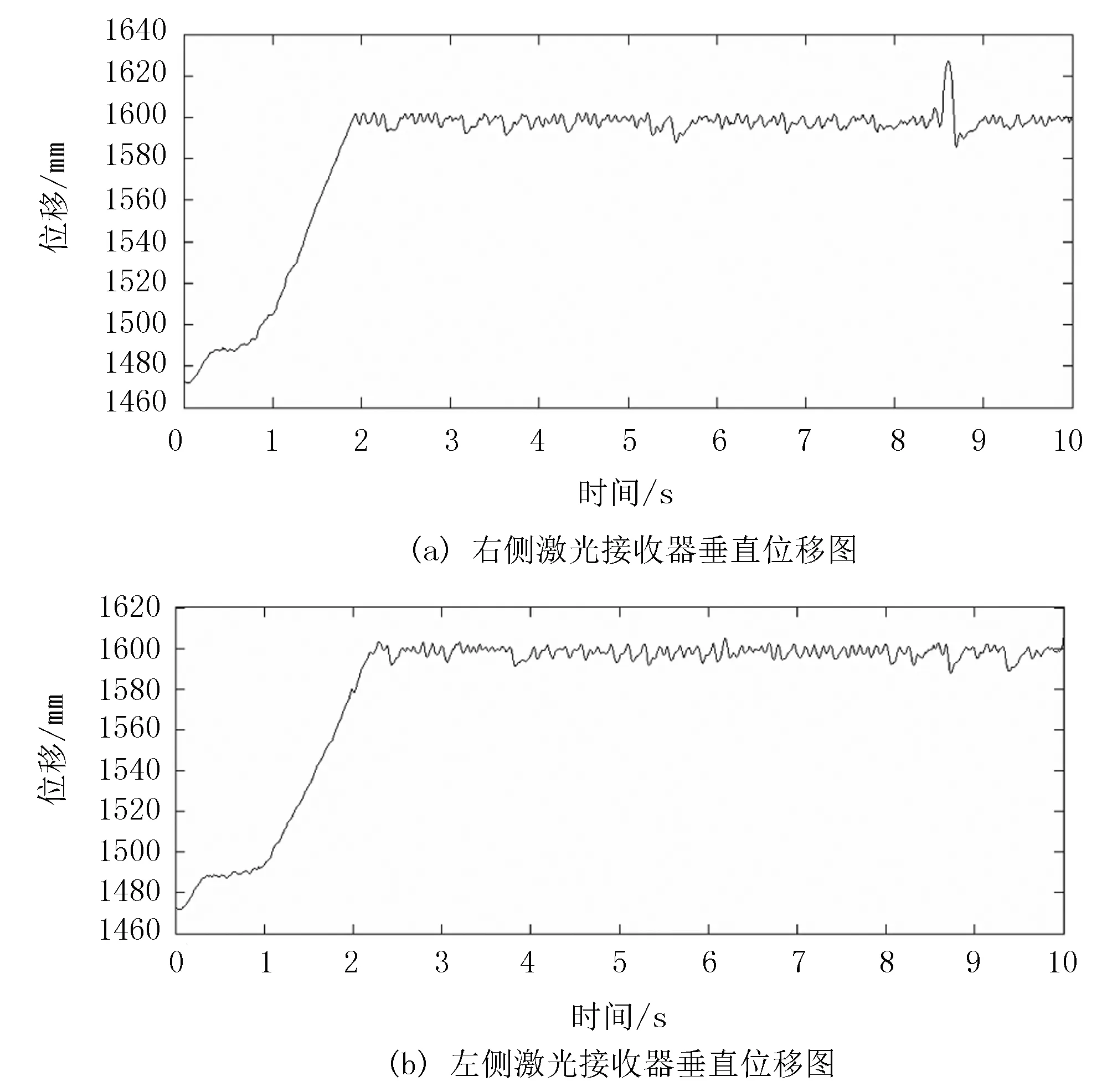
图11 激光接收器相对于地表模型的垂直位移图Fig.11 Laser receiver’s vertical displacement diagram relative to the ground
从左右激光接收器相对于地表模型的垂直位移来看,位移数值稳定在1 600mm,误差范围在±20mm内。在0~2s内近似线性变化,这是由于在仿真开始时系统检测到初始时刻激光接收器相对于地表模型的垂直位移未到达设定值,液压缸以恒定速度伸出;在2~10s内,激光接收器相对于地表模型的垂直位移到达设定值。仿真过程中,深松机整体保持水平,其波动是限深轮接触时的下陷量不均匀引起的。
液压系统的求解在Amesim软件中进行,其仿真过程中液压缸输出位移变化如图12所示。
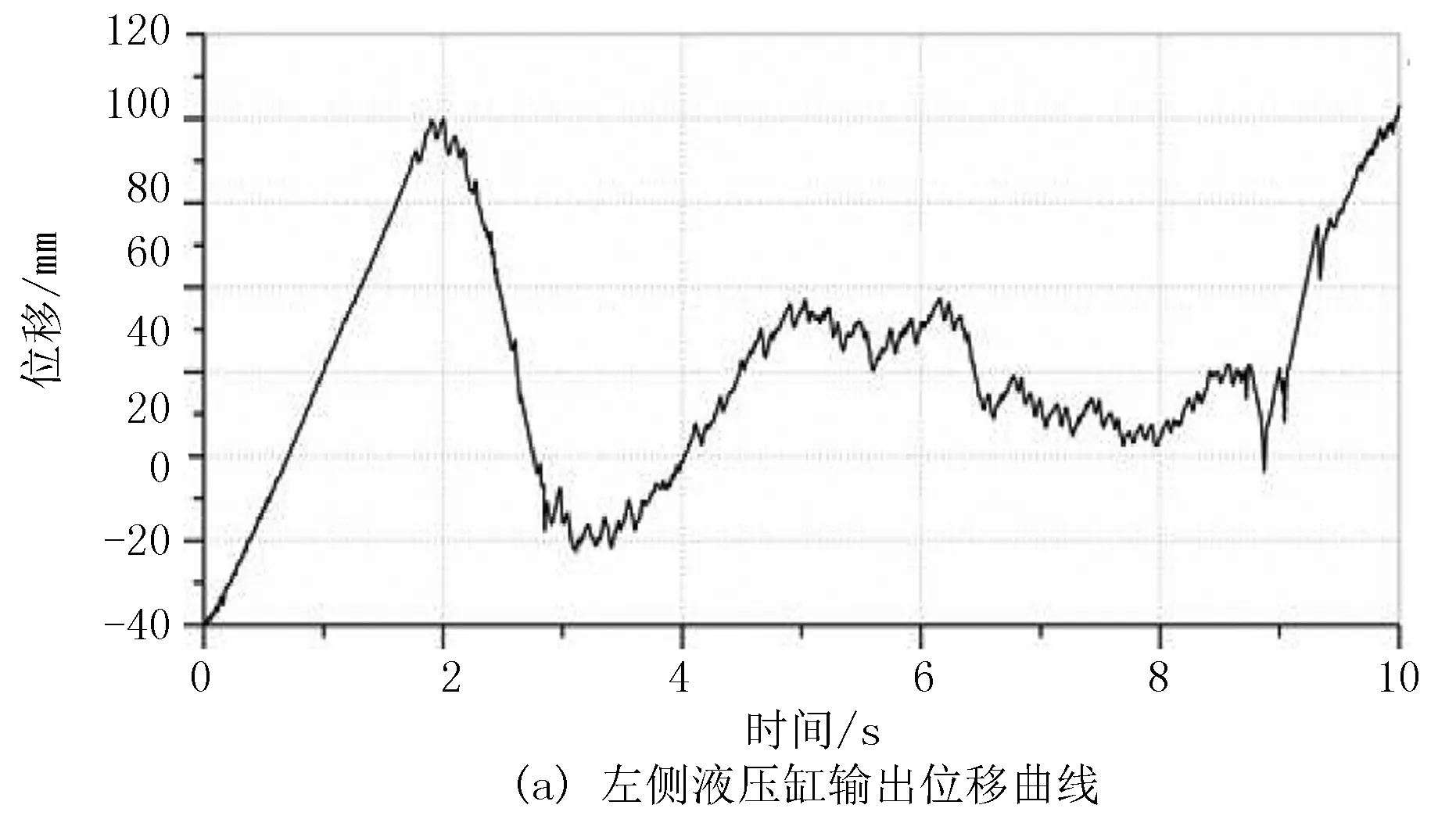
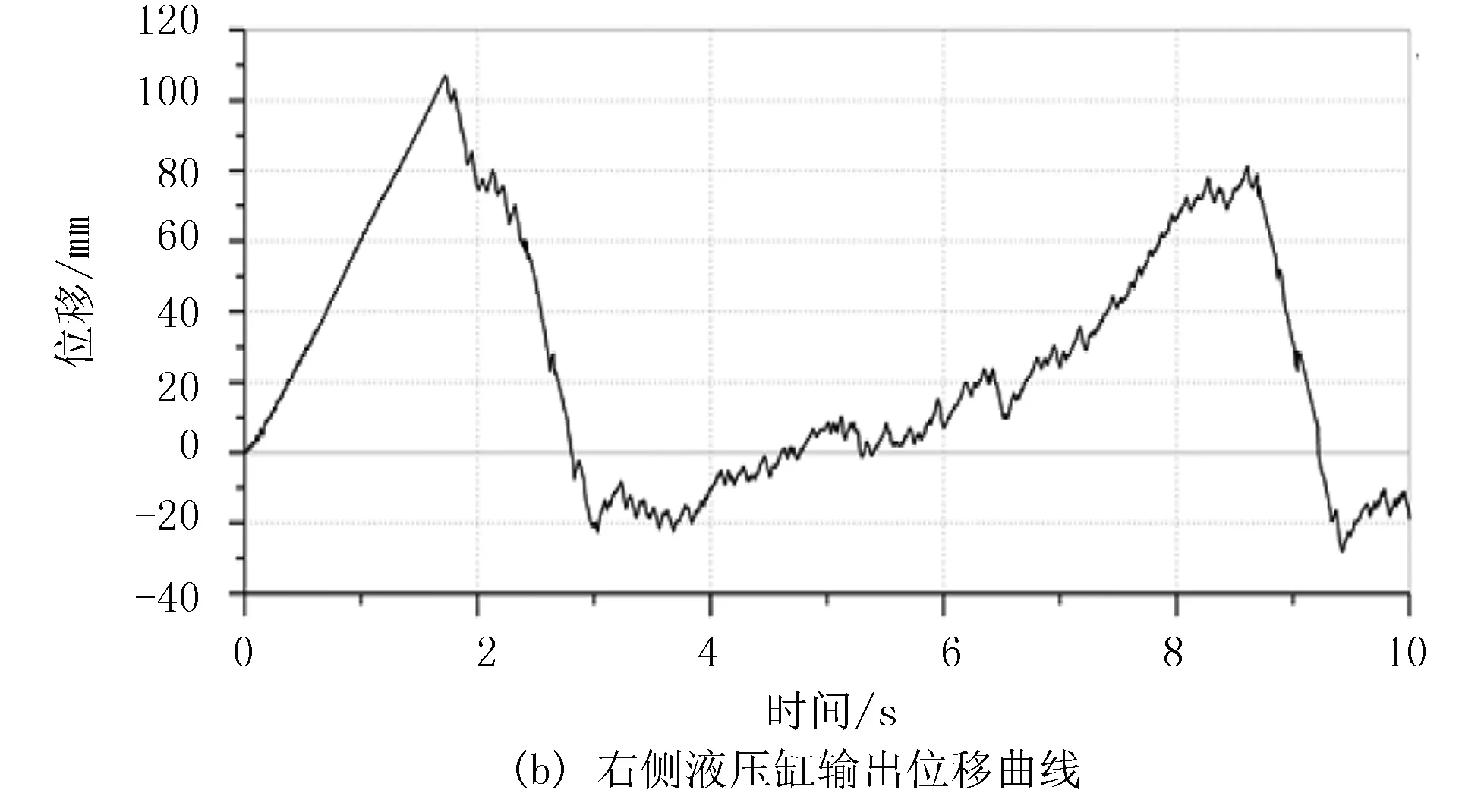
图12 液压缸输出位移曲线图
从液压系统的输出位移来看:在0~2s内,左右两个液压缸输出位移近似线性变化,说明初始时刻激光接收器相对于地表模型的垂直位移未到达设定值,液压缸以恒定速度伸出,与左右0~2s内的激光接收器垂直位移变化相同;2~10s内,输出位移开始跟踪地表变化。输出位移有波动说明液压缸在根据地表轨迹进行实时的调整。从整体的运行轨迹可以看出,仿真过程中液压缸输出位移能够实时追踪农田地表的变化。
4 结论
1)设计了限深轮调节机构,使深松机在深松作业时不受农田地表的变化进而保持犁底层保持水平。
2)建立了限深轮与土壤接触的数学模型及深轮与液压缸的数学模型。
3)实现了Adams、Amesim与Simulink的联合仿真,结果表明:深松作业时,深松机不受农田地表变化影响,始终保持犁底层水平,Amesim液压系统输出位移近似跟随农田地表的变化。
