水深测量技术及应用实例探讨
2018-08-09董诚刘斌
董诚 刘斌

摘 要:本文基于笔者从事海洋测绘的相关工作经验,以多波束测深系统在海洋航道测量应用为研究对象,论文首先探讨了多波束测深系统的组成,进而以多波束测深系统用于航道管理为任务背景,详细研究分析了多波束测深系统测量应用流程和监测结果。
关键词:多波束 测深 海洋 航道 监测
中图分类号:P229 文献标识码:A 文章编号:1672-3791(2018)03(b)-0050-02
1 多波束水下测深系统
1.1 多波束测深系统的组成
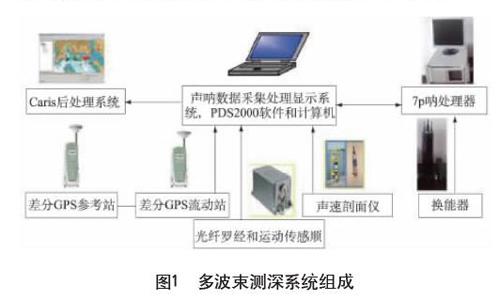
多波束测深技术是现代水下探测领域的新兴技术,它集成了现代空间测控技术、声呐技术、计算机技术、信息处理技术等一系列高新技术,实现了对水下探测目标的高精度和高密度测量。本文用到的SeaBat 7125是目前世界上最先进、精度最高的多波束测深系统之一,它主要由OCTANS光纤罗经和运动传感器、声速剖面仪、侧扫图像处理系统、多波束数据后处理系统(CARIS HIPS 后处理软件)、QTC Multiview底质分类系统等共同组成。整个系统的组成见图1。
1.2 系统特点
(1)SeaBat 7125以带状方式进行测量,波束连续发射和接收,测量覆盖程度高,对水下地形可100%覆盖。与单波束比较,波束角窄,能够完全反映细微地形的变化。单波束是点、线的反映,而多波束则是面上的整体反映。多波束测深系统的测量成果更真实可靠,由于是全覆盖,其大量的水深点数据使等值线生成真实可靠;而单波束是将断面数据进行摘录成图以插补方式生成等值线,在数据采集不够时,等值线会存在一定偏差。(2)发射换能器向水底投射出 128°宽的覆盖扇区,接收器同时形成256个动态聚焦波束,测深分辨率为5mm。波束后向散射强度图像和检测到的距河床底距离实时显示在声呐监视器上,且便于快速质量检查。(3)众所周知,测量船只的运动姿态对水下测量的数
据影响很大,多波束测深系统在测量前和测量时,光纤罗经和运动传感器实时采集船行姿态数据,PD2000采集软件同步记录船姿态信息,并对船行姿态进行实时校正,进而保证后处理中的水深测量数据能够真实有效地反映水底情况,而单波束在这方面是无法实现的。(4)CARIS HIPS后处理软件功能强大,可以根据需要抽取不同比例尺的数据成图,生成的图件类型有测深数据图、水深等值线图、三维数字地形模型(DTM)图彩色水深图、彩色地形阴影图以及质量控制报告等。
2 多波束测深系统应用于采砂管理量化监测
传统的水下监测方法大多是采用单波束测深系统完成的,它是一种线状反映水下地形的手段,工作量大且精度有限,难以胜任大比例尺和特殊要求的水下地形测量任务。而多波束测深系统具有测量快捷、高分辨率、高精度、全覆盖等特点,可以现场监视水下地形地貌的细微变化,非常适合水下工程及河道的监测任务。在此背景下,采用多波速测深系统对区域河道进行数字化、信息化监控管理就显得尤为重要。
在数据处理方面,传统的处理方法是通过构建Delauny三角网或Grid规则格网来形成水下的DTM,再通过分块处理、四叉树索引来达到水下地形多尺度LOD显示的效果。但是针对区域河段采砂行为的量化监测而言,其核心思想并不是可视化,而是周期性地监测河段砂量开采的变化情况,同时考虑到水下地形数据具有多样性、海量性、复杂性等特点以及提高计算效率减少计算机功耗等目的,本文采用对离散点云数据进行插值拟合而非构建 DTM的方法来处理不同时间采集的多波束水下地形数据,能够保证有足够的水深值来进行数据插值,保证结果的正确性且不失真。在此基础上,对拟合曲面进行求差计算,从而得出阶段时间内河道砂石资源的变化量,辅助管理者对合理开发利用砂石资源进行决策。
采集得到的这些多波束点云数据属于大规模离散数据的一种,在这些海量的点云数据当中,偶有临近点间的高程突变(局部不连续),但根据水下地形的特点分析,这些水下高程点的突变一般不是由水下地形的陡然起伏所造成,更为可能的是测量时产生噪声点或无效数据点,需要通过滤波处理去掉无效点。
经过滤波后的离散数据点的曲面重建一直以来是函数逼近论的一个重要研究内容。近几年来,随着计算机辅助设计与图形学的发展,离散数据的曲面重建技术得到了广泛的研究和应用,离散数据拟合或插值是用一个光滑的曲面或通过一系列无规则的抽样数据来逼近。
本文采用加权移动平均算法(Weighted Moving Average)对滤波后的数据进行网格化处理。加权移动平均算法用于将离散型分布的数据点转化成规则网格分布的数值,同时对原始数据进行插值加密或抽取处理,目的是用地形表面上一系列离散的数据点表示地形表面的连续函数。
该方法十分灵活并且精度较高,计算简单,不需要很大的计算机内存。算法选取离散分布的数据点时,一般考虑2个因素:(1)范围,即采用多大面积范围内的数据点来计算被插点的数值;(2)点数,即选取多少点参加计算被插补的点。这两个因素的实际应用要根据具体情况而定。范围的大小是以某个被插值点为圆心,以R为半径来确定的。其半径决定与原始数据点的疏密程度和原始数据点可能影响的范围。由于原始数据点分布不均匀,为了保证求解二次曲面方程,要有足够数量的点,但又不能太多,因此圆半径不是固定的。对于动态变化的圆半径的决定,可以采用逐步变动的做法(见图2)。
将研究河段内水下地形表面上一系列离散的数据点转化成规则网格分布的连续函数,采用规则圆方法,拾取规格化节点临域范围内扫测值进行拟合计算。对于每一个新点选取其邻近的n个数据点。把新点作为平面坐标的原点,然后用一个多项式曲面拟合。多项式中的各参数由n个数据点求得。
3 航道管理量化监测的应用工程实例
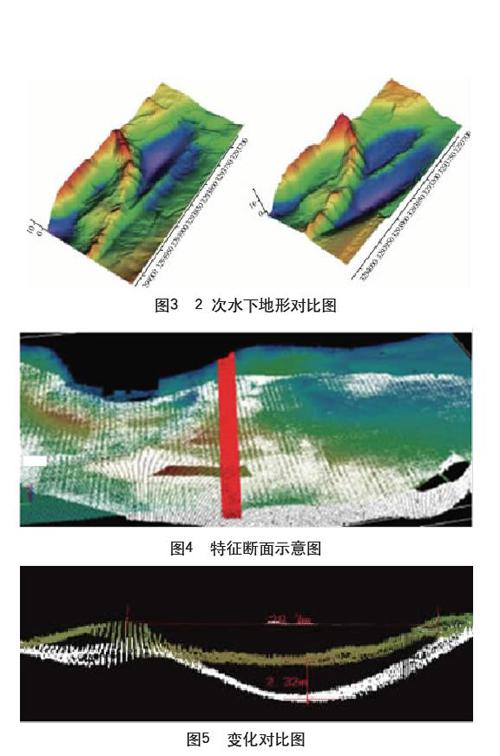
按照此技术路线于2015年4月25日和2016年4月27日2次分别对进行了分阶段的测量,前次测量时水面高程为24.247m;后次测量时水面高程为21.978m,其水下地形示意图见图3至图5。2次测量的目的,就是为了得到阶段时间内区域河道内砂石资源量的动态变形情况。
按照上述方法分别拟合插值2次测量得到的多波束数据,并采取俯视的角度进行比较。截取图4中深色区域的断面进行分析,如图5所示。
4 结语
多波束测深系统广泛应用于堤防、水库、湖泊及海洋等水域的水下地形测量,进行水下工程及其水工建筑物的安全检测(如抛石护岸等);河道疏浚及港口、码头、桥梁的工程测量;水下管线、电缆等的监测;沉船、水下物体的打捞搜寻等。这套系统的测量效益、实用性和广阔的应用前景将进一步显现。
参考文献
[1] 李成刚,王伟伟,阎军,等.传统多波束系统与具有相干特点的多波束系统的研究[J].海洋测绘,2007,27(2):77-80.
[2] 李涛章,叶松,廖小元,等.铰链混凝土板沉排新技術与施工实践[J].人民长江,2002,33(8):26-29.
