以创新型人才培养为导向的探究型实验平台建设
2018-08-08陆玲霞张建良
韩 涛, 姚 维, 陆玲霞, 张建良, 吴 越
(浙江大学 电气工程学院, 浙江 杭州 310027)
培养创新型人才是“双一流”学科建设的重要任务。实验教学是理论与实践沟通的桥梁,是培养创新型人才的重要途径,在培养学生的实践能力、探索能力、科研能力、创新能力方面有着重要的作用。传统实验存在内容陈旧、教学形式单一,演示、验证性实验比重过高等缺点,无法有效地承担培养学生创新思维和创新意识的任务[1-2]。为了解决这一问题,各高校结合自身特色,从实验教学模式、实验教学体系、实验教学管理等方面开展了一系列的探索实践[3-5]。
我校自动化实验教学中心依托学科特色、师资力量、人才培养等综合优势,并借鉴国内高校在实践实验教学方面的成功经验,将实验教学与竞赛指导经验相结合,构建基于智能车系统的探究型实验平台(以下简称“平台”),将自动化专业核心课程与创新实践类课程相互贯通,从实践的角度来促使学生完成知识体系的自我建构,实现创新能力的培养[6-8]。
1 探究型实验实施情况及存在的问题
探究型实验是以学生为中心,从认知规律和能力发展角度出发,以基础型规范型实验、综合设计型实验、研究探索型实验为基础,以创新能力培养为目标,依托开放的实验教学环境,采取多种教学方式,协助学生完成知识体系的自我构建及更深层次的新智慧建构、方法论建构[9-10]。
自2013年起,我校实验中心开始在自动化专业核心课程及创新实践类课程实施探究型实验,到目前为止,已建设探究型实验项目143项,累计参加学生291人,从学生反馈上来看,教学效果达到预期目的,但在实施探究型实验过程中也发现存在以下问题:
(1) 实验内容主要针对该门特定的知识点的更新,学生缺乏对整个专业知识体系的认识,无法体现与前置课程及相关课程、科研实践之间的联系,无法有效地连接第一课堂、第二课堂和第三课堂。
(2) 实验缺乏明确的主线,“碎片化”现象严重,不利于技术积累和能力提升,创新能力难以提高。
2 探究型实验平台建设
2.1 平台建设思路和目的
围绕我校“以人为本、求是创新、整合培养、追求卓越”的教育理念,结合自动化专业培养方案,依托省级重点实验室和智能技术科教实践基地资源,以智能车系统为主线,对探究型实验项目进行整合,构建实验、实践、创新“三位一体”的探究型实验平台[11-12]。
平台将竞赛内容与自动化专业核心课程、创新实践类课程相结合,依据学生的认知、实践能力形成规律和个体差异性,将竞赛内容模块化、项目化的形式分层次地引入实验教学。以学生为主及在多维度开放的环境下,采取以问题为导向的指导方式及注重过程的考核方式,逐步引导学生建立独立的思维模式和培养创造性解决问题的能力,协助学生完成自我知识体系的建构与升华。
2.2 平台建设内容
平台由微机原理与接口技术、信号分析与处理、控制理论、嵌入式系统、智能控制系统设计与实践、Matlab与系统仿真课程组成,其中以微机、信号和控制理论探究型实验为基础,嵌入式系统、智能控制系统设计与实践、Matlab与系统仿真探究型实验为拓展延伸,将竞赛内容融入到探究型实验教学中,通过智能车校赛、省赛、国赛来检验实验教学成绩。平台构成如图1所示。
(1) 硬件系统。以单片机最小系统为核心,包括电源电路、电机驱动电路、采集电路的设计,及其他与单片机相通信的电路。例如在微机原理与接口技术、嵌入式系统课程中开设的单片机最小系统设计与实现实验,从实践角度上分别让学生自行设计以51为核心和以STM32为核心的最小系统板,这个过程让学生了解不同器件的封装,掌握PCB制板技术,直插和贴片元件的焊接技能,模块化调试的思想。
(2) 路径识别。利用图像类或感应类传感器获取路径及车身姿态的有效信息,利用偏差及其变化率来获取实时路径的特征信息。如在嵌入式系统课程开设的基于直立车的角度测量实验,在掌握硬件系统设计的基础上,利用模拟的加速度计和陀螺仪来获取加速度值和角速率值,通过卡尔曼滤波算法来获得角度值,其难点在于陀螺仪的过冲和零漂问题及滤波算法的实现及收敛性。
(3) 控制策略。包含转向控制和速度控制,其中转向控制模块根据路径识别的结果,选择控制算法实现小车在赛道上转弯的快速性、准确性;速度控制模块,利用编码器检测结果实现对电机的精准控制。如在控制理论课程中开设的两轮平衡车实验,让学生直接面对实际控制系统的反馈控制效果,采用不同的控制方案,实现在外力干扰下,平衡车的控制效果,深化了学生对控制的理解,为后续的创新实践活动奠定了基础。
(4) 开发调试。根据收集来的数据,从硬件、软件机械3个方面来寻找影响控制效果的原因。如基于Matlab的上位机设计实验,是利用蓝牙等无线模块现场采集数据,并绘制曲线,根据反馈曲线对整个智能车系统进行调试。
在此平台上,遵循知识和能力的发展规律,将智能车系统的4个核心部分分解成不同的课程实验,以模块化、层次化的形式开展实验教学活动。学生在本门课程及相关课程教学的基础上,从实践的角度上,完成专业核心课程知识的融合和建构,为创新能力的培养奠定理论基础和实践基础。以基于电感检测原理的探究型实验为例(见表1),其中微机原理与接口技术为大二课程实验,其余均为大三课程实验。
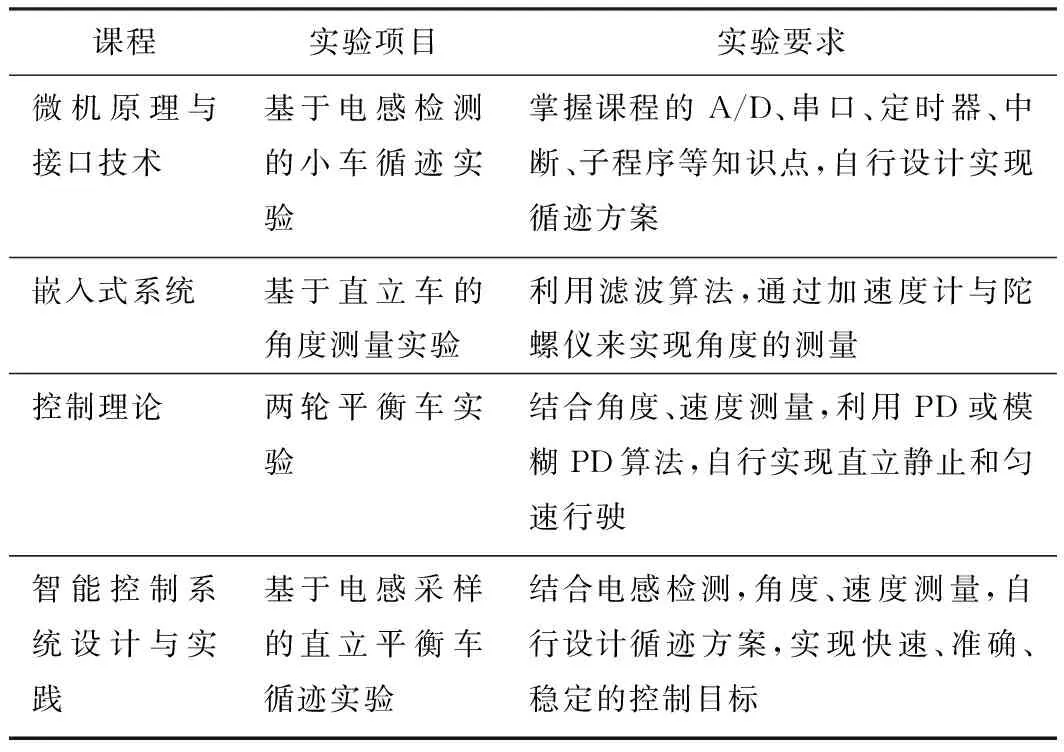
表1 基于电感检测的实验内容
2.3 平台实验实施方案
平台实验实施流程见图2。
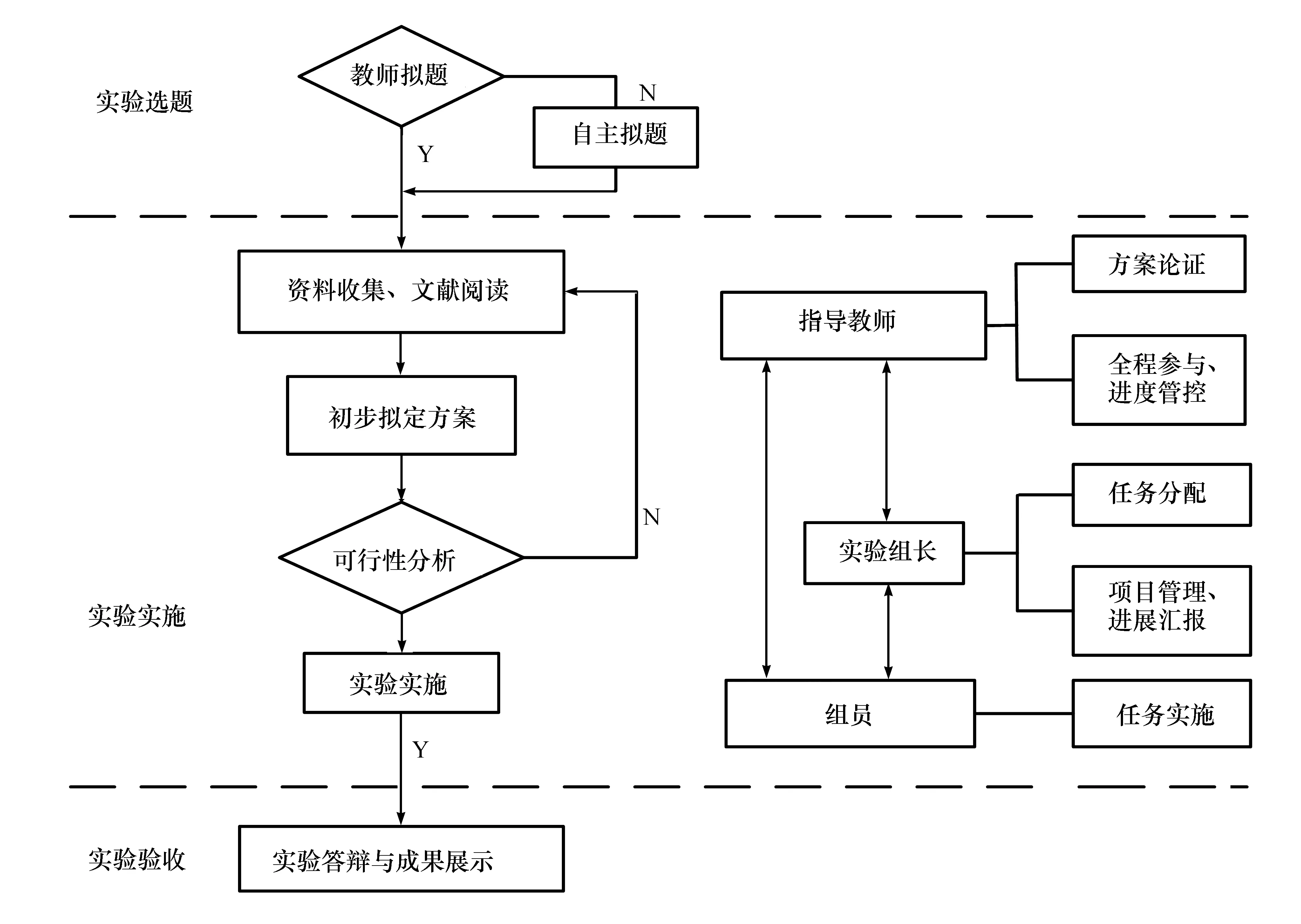
图2 实验实施流程
(1) 实验选题阶段。题目来源可以是竞赛内容转化内容,也是可以是学生阅读提供资料后自行拟定的题目,如在CCD图像采集实验中,学生根据实验内容自行将大津算法应用在图像边沿检测上。
(2) 实施阶段。学生以分组的形式完成资料收集、方案拟定,器件选择、方案实施、撰写报告、现场答辩,实验教师则全程跟踪实验过程,针对实验中遇到的问题,以PBL(problem-based learning)为导向,采用5W(5why)分析法,让学生自己找到问题的核心点并拟定解决方案;施行教师和组长的双重管控,根据组长提交实验计划安排表,实施进度管控,保障实验的顺利进行[13-14]。
(3) 验收阶段。采用互评方式,实施者必须将实验的各个环节及解决问题的思路与实现方案以简洁明了的语言表述出来。
整个实验过程从资料收集、方案设计体现了隐性思维显性化,方案实施过程实现了显性思维具体化,互评答辩过程体现了具体思维系统化。此过程即提升了学生的实践能力、总结提炼能力、语言表达能力、团队协作能力,又系统地拓展了学生的创新思维。
2.4 加强保障建设,为平台提供良好环境
健全的管理机制和专业的实验指导队伍是提高探究型实验教学质量,培养学生创造性思维的保障。
在管理方面,借助我校实验室管理系统,学生在系统上进行预约,并递交需要的器件、仪器设备申请,教师审核通过后,即可进行实验。
实验指导队伍方面,目前实验教学团队由1名博士和3名硕士组成,均有较强的教学科研能力和工程背景,能有效承担探究型实验的教学指导工作。
3 平台建设成果
3.1 实现课程内容的横向协同与纵向衔接
智能车系统涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械等多门学科知识,具有学科交叉、强调工程实践能力的特点。根据竞赛内容设计的实验能有效地引导学生进行综合性、系统性的研究,从而提高创新能力。在实验过程中,学生需要运用编程语言实现检测技术、滤波算法、控制算法、建模方法等内容,这些方法与自动化专业核心课程与创新实践类课程的教学目标相契合,从而实现了自动化专业课程之间的横向协同与纵向衔接。探究型实验与课程教学目标对应如表2所示。
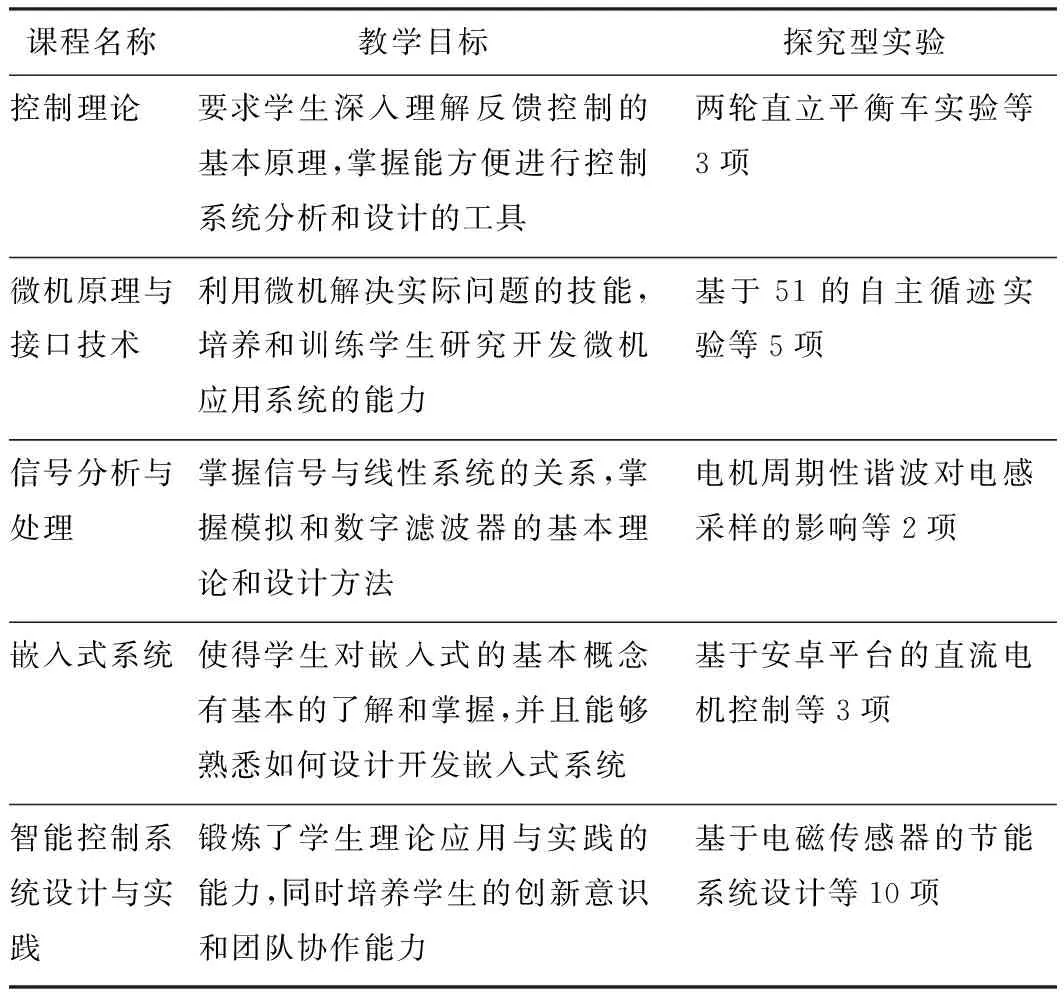
表2 探究型实验与课程教学目标对应表
3.2 实现第一课堂与第二课堂的良性互动
在“以赛促学、以赛促教、学教互促、良性发展”的理念下,改革平台相关课程的教学方式,在课程教学过程中采取“项目驱动教学法”,并采取案例式教学法进行启发式教学,引导学生把课内外知识融会贯通,由知识的积累向注重综合能力培养转变,激发学生的学习兴趣、提高教学效果,实现第一课堂与第二课堂以及课程教学改革与学科竞赛之间互相促进、相互支撑。
3.3 构建立体化实践教学体系
平台将竞赛的内容与经验积累转化为课程的探究型实验项目,在实验教学中通过不断完善设计性、综合性实验项目,不断开发具有实际应用背景的创新性、探究型实验项目,提高实验教学整体水平。通过项目的实施,将课程实验、科研训练、创新竞赛活动、毕业设计等教学环节有机地结合,构建一个多形式、多层次、特色鲜明的立体化实践教学体系,切实锻炼了学生的综合实践创新能力、团队协作能力与交流沟通能力。
基于该创新平台,实验中心指导电气工程学院本科学生在2013年以来的全国智能车大赛中取得特等奖1次、一等奖7次的成绩,培养了学生的技术创新能力,同时提高了学院和学校的教学实力和国内知名度。
4 结语
实践证明,以智能车这一创新实践活动为主线的探究型实验平台促进了实验教学与课程教学的改革,探究型实验项目与专业基础课、专业实践课对接,实现了自动化专业主干课程之间的横向协调与纵向衔接,能有效强化学生的团队协作精神,激发学生的兴趣和求知欲,提高学生的动手能力、创新能力、自主分析、解决问题的能力,培养了科学研究精神,实现了高素质创新人才的培养目标。
