城市轨道交通车辆牵引电动机无位置控制探究
2018-08-06时龙震
冯 准 时龙震
1.辽宁铁道职业技术学院,辽宁锦州 121000;2.苏州市轨道交通集团有限公司,江苏苏州 215000
现代城市大力发展轨道交通,通车城市及延长公里数逐渐增加,使得地铁车辆使用程度大大增加。在自动化程度相对发达的现今阶段,地铁车辆控制方式采用ATC,可以实现全自动驾驶模式,而在自动驾驶模式中,现今使用的设备必不可缺的一个关键设备是霍尔传感器。而由于地铁车辆的特殊工作环境(大量运行里程都在隧道内),导致霍尔传感器故障率升高,通过取消霍尔传感器,用无刷直流电动机取代直流电动机,利用无刷直流电动机运行时各相绕组本身存在的反电势作,通过过零检测法获取电动机转子位置代替原有位置传感器的作用,参与电动机的闭环控制运行。实现地铁车辆安全运行。
1 控制方式的选择
目前国内外学者对无刷直流电动机的研究大多集中在其速度和位置控制技术上。无刷直流电动机速度伺服系统的结构,系统采用电流、速度双闭环控制,电流环采用传统的PI控制,速度环既可采用PI控制,也可根据运行条件选择合适的控制策略。
反电动势过零检测法;业内人士提出了对于无刷直流电机转子位置检测的诸多办法,针对本课题研究的调速系统做到检测到悬空相的过零点从相即可满足本课题对于无刷直流电动机换相要求,下面我们对利用悬空相的端电压或相电压检测该相反电动势过零点的方法做以论述。
三相无刷直流电动机采用两两通电方式,每转过60°就必须换相一次,这样每转过一周就要6个换相信号,而每相的感应电动势都会产生两个过零点,如图1,共计有6个过零点,那么只要计算出这6个过零点,就可以获得换相信号。
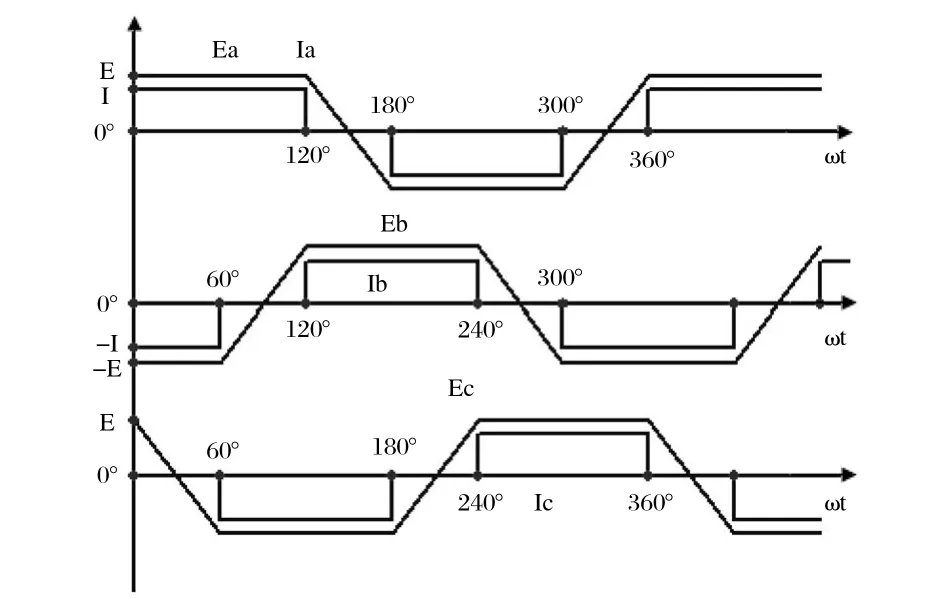
图1 反电动势和相电流波形
如图2所示,图中,L—相电感,R—相电阻,EX —相感应电动势,RI X —相电流,VX —相电压,Vn—星形链接中性点电压。

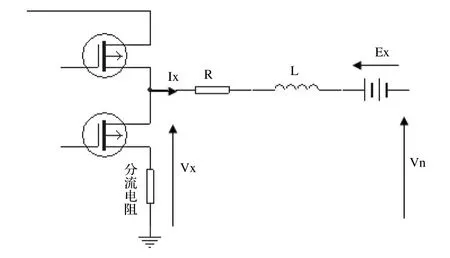
图2 电动机定子某一相等效电路
对于三相无刷直流电动机来说,每次只有两相通电,两相通电的电流相反,第三相断电,相电流为0,因此,将A、B、C分别带入上式,就可以得到三个方程,将三个方程相加,由于电流大小相等、方向相反,所以RIX和项相互抵消,可以得到:

由图2可知,无论任何相感应电动势的过零点都有EA+EB+EC=0,即:

对于悬空相,Ix=0,所以有EX=Vx+Vn。
所以,只要检测出转子绕组三相端电压,然后由程序计算未导通相的反电动势值,当未导通相反电动势值为零时即表明检测到未通电相反电动势过零点。
2 电动机的启动方式
无刷直流电动机的启动技术很多,但是在诸多启动方式中,技术成熟并应用最为广泛的是三段式启动技术,由于电机在初启动和转速较低时反电势为零或很小,无法确认转子位置信息,基于此特殊性,反电势过零检测法需要采用具有针对性的起动技术。通常是按他控式同步电动机的运行状态,从静止开始加速,直至能够检测到反电动势过零点,再切换至无刷直流电机运行状态。
2.1 启动
采用转子通电记忆法,通过软件记忆车辆停车最后一个通电相,启动时,第一通电相依然为本相,然后依次换向,使车辆启动。
2.2 加速
按他控方式顺序通电,同时通过PWM控制逐渐提高电机外施电压,这样使转子转速也逐渐提高,以达到顺利检测未通电相反电动势过零点的目的。
2.3 切换
电机加速到预定转速后,(一般来说,由于采用反电动势过零检测法,电动机转速越低,其相电压越小,越不容易检测,所以,切换时刻最低转速一般不低于30r/min)当反电动势信号已可以检测到,再切换到无刷直流电机自控方式运行。
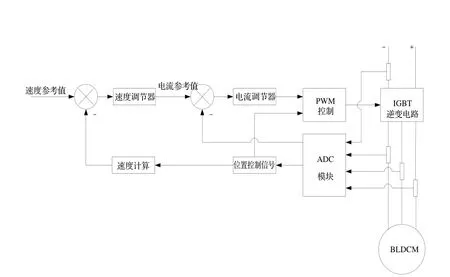
图3 双闭环调节控制图
3 结语
无刷直流电机及其驱动器是一种时变、强非线性开关电路,仅仅采用一般的控制方法,很难达到较高的性能要求,采用芯片控制可以实现更为复杂的算法。采用PWM-ON单极性驱动模式,减小了开关管的损耗,提高了运行可靠性。
无刷直流电动机的电子换向取消了直流电动机的机械换向,彻底消灭了换向火花,由于碳刷的取消,使轨道交通运营公司的生产成本大大降低,同时也大大增加了地铁车辆运行的可靠性。
