中小学模块化机器人教育探究*
2018-08-02黄芹陶云王玉金吴昌林
黄芹 陶云 王玉金 吴昌林
中小学模块化机器人教育探究*
黄芹1陶云[通讯作者]王玉金2吴昌林2
(1.云南师范大学 教育科学与管理学院,云南昆明 650500;2.华中科技大学 机械科学与工程学院,湖北武汉 430074)
针对目前中小学机器人教育理论体系不完善、师资力量薄弱、城乡发展失衡、教育机器人标准不统一等问题,文章基于发明问题解决(Teoriya Resheniya Izobreatatelskikh Zadatch,TRIZ)理论,构建了中小学机器人教育问题解决模型,并推导得出了以模块化机器人来推进中小学机器人教育的策略。在此基础上,结合认知发展规律,文章构建了模块化机器人教育课程体系。以模块化机器人作为机器人教育的载体,既是解决目前我国中小学机器人教育困境的有效途径,也对我国中小学机器人教育的健康、规范和可持续发展起着积极的促进作用。
机器人教育;模块化机器人;TRIZ理论;中小学
机器人教育是推进科学素质教育的重要途径,不仅可以有效激发学生的学习兴趣,培养其团队协作能力、系统性思维和创新思维等,而且对机器人学科的发展也有巨大的促进作用[1][2]。目前,国际上对机器人教育的重要作用已普遍达成共识,各种机器人比赛日益盛行,面向微课、创客教育的新型机器人教学模式正在成为研究的热点[3];我国对机器人教育的重视程度也不断提高,而《基础教育信息技术课程标准(2012版)》、《机器人学中小学课程教学指南》、《国家中长期教育改革和发展规划纲要(2010-2020年)》等文件的出台,更是极大地推动了我国中小学机器人教育的进程。在此背景下,本研究针对中小学机器人教育的现状,进行了中小学模块化机器人教育的相关探索。
一 中小学机器人教育的现状
1 中小学机器人教育的形式
理论与实践并重是机器人教育的主要特征,即在强调动手实践获取直接经验的同时,也注重机器人原理性知识的学习,尽量让学生对机器人有一个科学、系统、全面的认识。目前,中小学机器人教育主要有竞赛和教学两种形式(如表1所示)[4],比较流行的教育机器人产品有乐高、广茂达、纳英特、诺博特、惠鱼、爱科星、未来之星、Arduino开源机器人等。

表1 中小学机器人教育的主要形式
2 中小学机器人教育面临的困境
目前,国内外的中小学机器人教育都处于起步阶段。中小学机器人教育在具体实施的过程中并非一帆风顺,其面临的困境主要体现在以下几个方面:
①机器人教育理论体系不完善。机器人教育理论体系涉及教育理念、教学目标、教材与内容、教学方法与策略、教学资源、教学评价等方面。目前的机器人教育理论体系还远不够完善[5],而且中小学生的基础知识和认知发展水平有限,许多教师对于如何将机器人技术理论体系应用到教学实践中也感到茫然,而通常采取以竞赛代替教学的做法,这就忽略了机器人教育对学生素质教育和可持续发展的重要意义。机器人教育理论体系的不完善,使得机器人教育无法与课堂教学进行深度融合。
②中小学机器人教育师资力量薄弱。开展中小学机器人教育对师资的要求较高,不仅要求教师有扎实的专业知识,还需其具备较强的动手实践能力和综合运用能力。然而,目前中小学机器人教育课程大多由其它学科教师兼任,教师的相关专业知识水平普遍不高,课时也得不到保障。虽然国内一些师范院校积极开展了小学教育本科专业机器人方向的有益探索和实践[6],但由于机器人技术知识体系的跨学科性,加上师资培养周期长、难度大,故师范院校机器人教育师资培养的成效并不显著。缺乏专业师资已成为中小学开展机器人教育的“瓶颈”,并使机器人教育在中小学呈现出逐渐边缘化的趋势。
③中小学机器人教育城乡发展失衡。农村中小学机器人教育是落实机器人普及教育的关键一环。但在我国多数偏远地区,教育部门并没有设立科技教育项目账户,学校科技教育经费的划拨与使用均缺乏制度性保障,学校可利用的软硬件教学资源也远远落后于城市地区,这严重制约了农村中小学机器人教育的普及与发展。在经费紧、器材少、师资弱的情况下,农村中小学机器人教育的普及与发展任重而道远。
④教育机器人标准不统一。教育机器人是机器人教育的载体,具有统一标准的教育机器人可以减少经费的投入[7]。然而,目前市场上的教育机器人种类繁多、标准不一,学校和学生被迫不断补充、购买器材,以适应不断变化的机器人比赛主题和规则,造成了教育资源的浪费。
二 基于TRIZ理论的中小学机器人教育问题解决模型与推进策略
1 基于TRIZ理论的中小学机器人教育问题解决模型
TRIZ理论是基于专利分析提出的用于解决发明创造问题的方法论,其核心是采用系统化的解题流程来消除矛盾,从而推动问题从初始状态向目标状态发展[8]。Marsh[9]、周琴等[10]将TRIZ理论引入教育领域,采用40条创新解决理论解决教育领域中存在的问题和矛盾,极大地拓展了TRIZ理论的应用范围。
将TRIZ理论应用到机器人教育中,可实现问题的创造性解决。通过对中小学机器人教育现状进行分析,可以得到TRIZ的初始状态空间:={1,2, …,v}={理论体系不完善,师资力量薄弱,城乡发展失衡,教育机器人标准不统一}。由此,可以推出机器人教育的目标状态空间:={1,2, …,u}={理论体系完善,师资力量雄厚,城乡发展均衡,教育机器人标准统一}。基于TRIZ理论解决机器人教育中存在的问题,就是寻找一个未知算子:,使得u=(v),即确定一条由初始状态v到达目标状态u的路径。
基于上述解题思路,本研究利用TRIZ理论中的分割、普遍性、重力补偿、曲面化、反馈、复制等原理,来解决中小学机器人教育中存在的问题,由此构建了基于TRIZ理论的中小学机器人教育问题解决模型,如图1所示。该模型从中小学机器人教育现状出发,以机器人教育面临的四大困境构建问题的初始状态空间,进而根据相应的解决原理[11],推导得出问题的最终理想解,即中小学机器人教育的推进策略——模块化机器人。
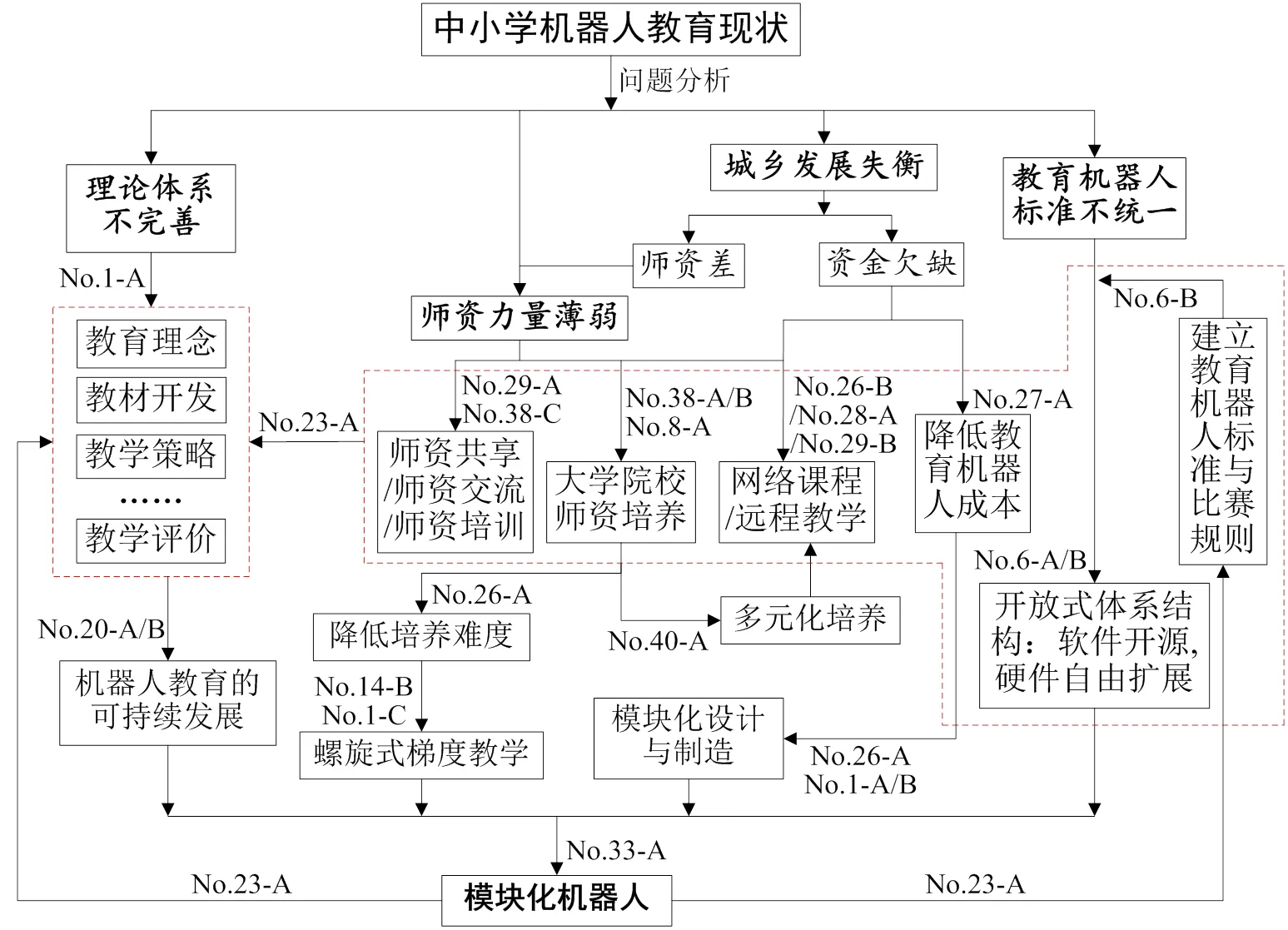
图1 基于TRIZ理论的中小学机器人教育问题解决模型
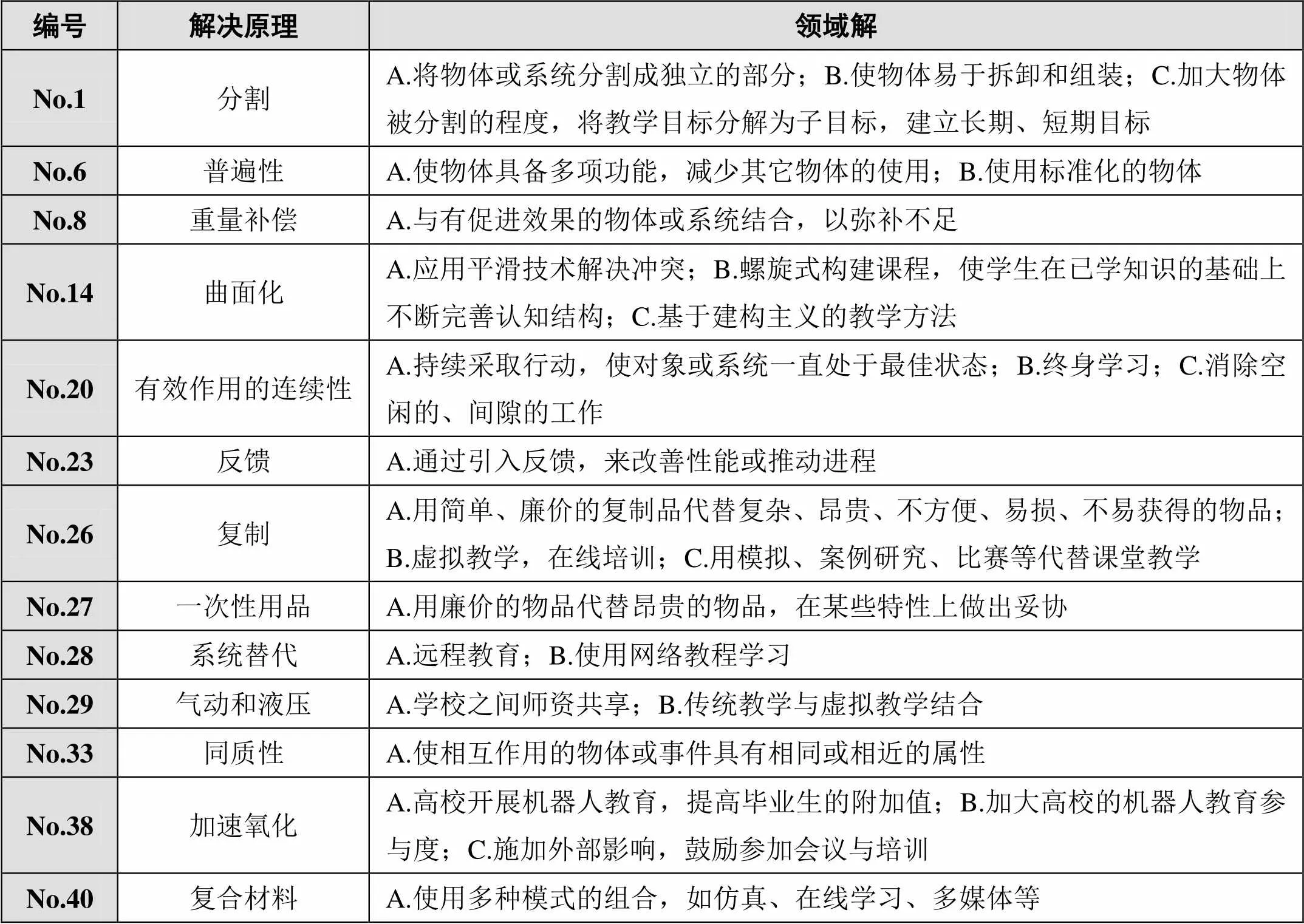
表2 TRIZ解决原理及其领域解的详细解读
图1中的编号表示TRIZ解决原理及其相应的领域解,其中数字表示解决原理、字母表示领域解,其详细解读如表2所示。
2 模块化机器人
基于TRIZ理论进行模块化机器人教学,可以有效推动我国中小学机器人教育的进程。模块化机器人是由多个自治模块组成的可重构机器人,每个模块配备传感器、驱动器等,具有计算和通信能力,可通过模块之间的自动连接或脱离来改变其拓扑结构,以执行不同的任务,有很强的环境适应性。根据拓扑结构的不同,模块化机器人可分为链型、网格型、混合型;而根据模块构型的不同,模块化机器人又可分为同构和异构两种类型[12]。由美国施乐帕克研究中心(Xerox Palo Alto Research Center)开发的同构型PolyBot模块及其机器人系统[13]如图2所示。
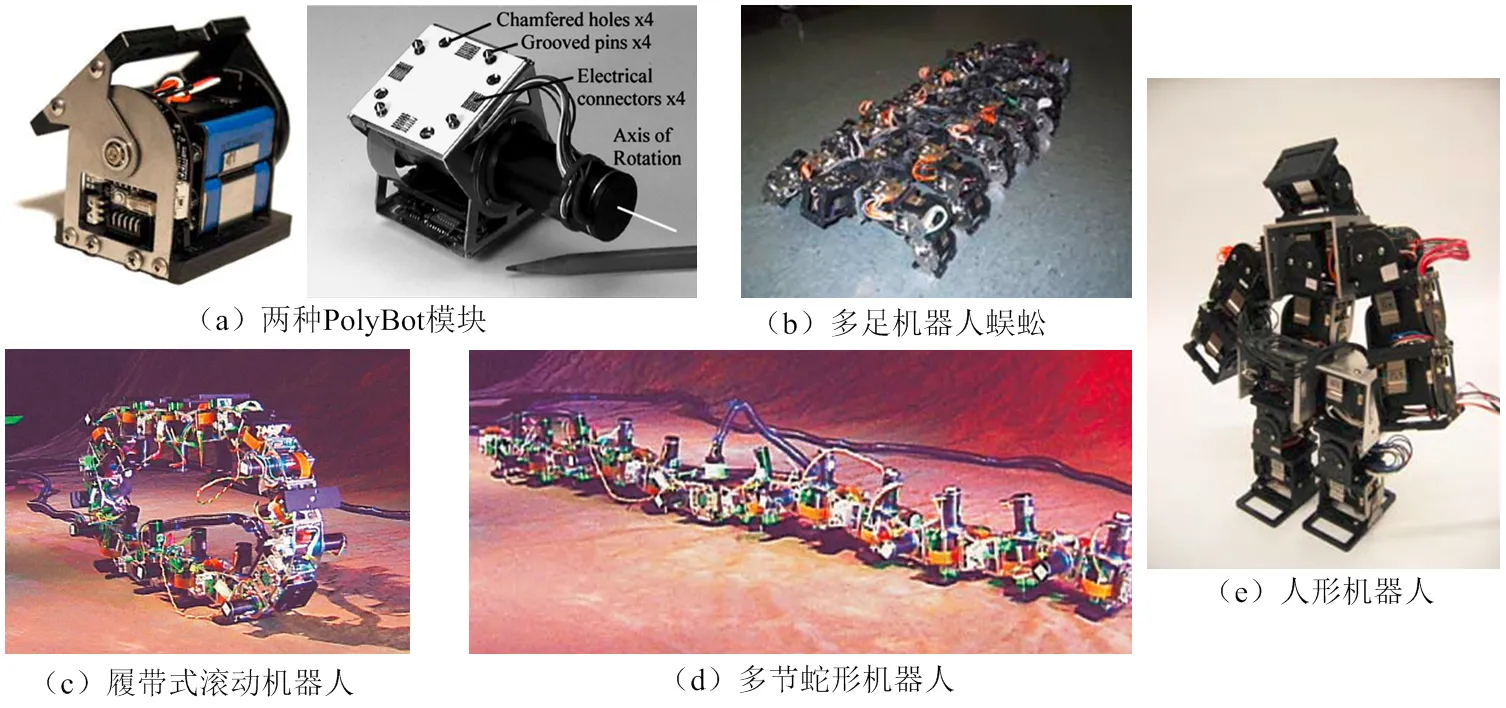
图2 PolyBot模块及其机器人系统
模块化机器人具有开放式结构,主要体现在软件的可移植性和硬件的可扩展性两个方面。其中,可移植性主要指软件程序经过简单的修改后,可移植到不同的操作系统和硬件平台上,并可重复使用;可扩展性主要表现为硬件的即插即用,并且系统允许硬件模块和传感器进行增减。将模块化机器人应用于中小学机器人教育之中,其优势主要如下:
①成本低,便于推广。模块化机器人仅采用一种或两种模块组成机器人系统,开发成本和时间大大缩减。此外,模块可批量生产,其硬件成本将大幅下降;当模块损坏后,可采用相同模块迅速更换,不必再重新购买新的机器人。
②采用即插即用的开放式结构,便于形成统一的技术标准,从而规范教育机器人市场。只有标准统一、市场规范,才能形成公平的教育环境,实现中小学机器人教育的健康发展。
③具有很强的柔顺性和容错性,便于构造不同类型的机器人。如通过对模块的增减,可构造出足式、履带式、蠕动式等不同类型的机器人,能满足机器人教学和机器人比赛的需要,并满足机器人教育多样化的需求。
④可迅速培养起一批能够胜任中小学机器人教育的师资。学习并应用机器人技术对于师范院校学生来说比较困难,但采用模块化机器人,可将课程的难易程度与机器人的智能化程度相对应,并可设置成螺旋上升式课程,从而降低了师资的培养难度。
⑤由于模块化机器人的开放性和可扩展性,使得基于模块化机器人来构建符合认知发展规律的可持续发展机器人教育体系成为可能。可以预测,模块化机器人将能适应婴幼儿阶段、中小学阶段乃至高等教育阶段的机器人教育。
三 构建模块化机器人教育课程体系
模块化机器人作为一类特殊的机器人,其教育课程需要具有科学性和系统性;同时,机器人教育应该以学生的认知发展规律为基础[14],在不同的学习阶段做好内容的衔接,形成可持续发展的机器人教育体系。为此,本研究在提出中小学机器人教育的推进策略——模块化机器人的基础上,结合认知发展规律,构建了模块化机器人教育课程体系,如图3所示。
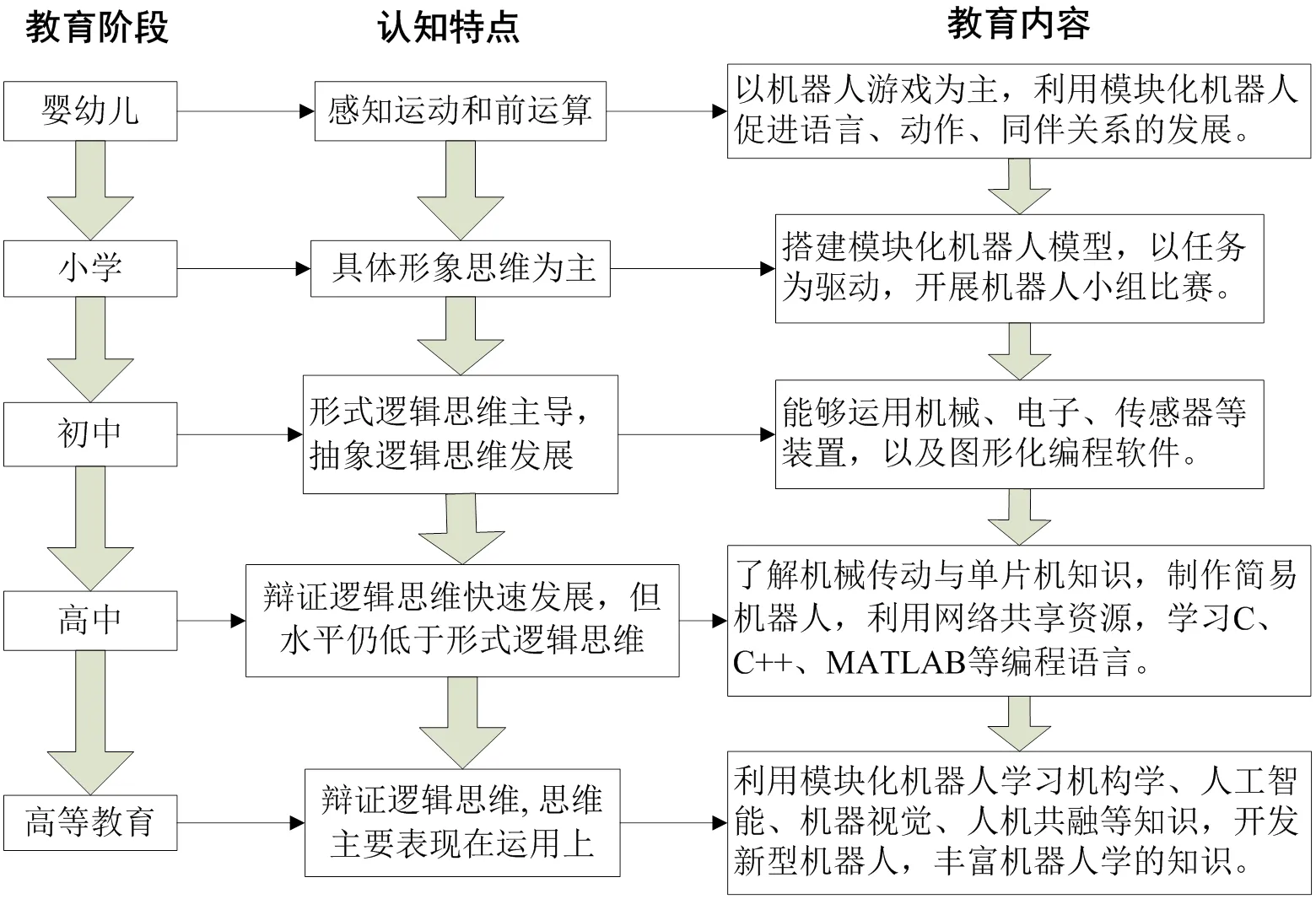
图3 模块化机器人教育课程体系
1 不同阶段对应的模块化机器人教育
①婴幼儿阶段(0~6岁):认知发展主要表现为由感知运动阶段发展到前运算阶段,婴幼儿通过触觉、听觉、视觉等建立起对客观物体大小、形状、颜色、方位、运动等的认知,并逐步发展语言能力和社会性交往能力。婴幼儿阶段的机器人教育主要以象征性游戏为主,通过购买已完成组装或家长自行组装的模块化机器人供孩子玩耍,以促进其动作和语言发展;或通过同伴间的机器人游戏互动,发展其同伴关系。
②小学阶段(6~12岁):认知发展处于具体运算阶段,以具体形象思维为主,儿童心理处于快速、协调发展时期,对客观世界具有强烈的好奇心和探究欲望,是促进智力发展和培养良好个性的好时机。小学阶段的机器人教育以培养学习兴趣为主,教师在具体教学上宜充分发挥模块化机器人积木式和即插即用的优势,让学生自己动手搭建模块化机器人模型,并以任务(如机器人越障、爬坡、搬运物体等)为驱动,利用手柄、遥控器等完成小组协作和比赛,以在团队协作与比赛中发展智力,培养同伴关系。
③初中阶段(12~15岁):认知发展处于形式运算阶段,抽象逻辑思维快速发展,以形式逻辑思维为主导。初中阶段的机器人教育要求学生能够运用机械装置、电子装置、传感器装置等,自主增减传感器模块,完成信息的采集;能够采用图形化的编程软件完成机器人程序的编写,理解程序的基本结构,锻炼逻辑思维能力。
④高中阶段(15~18岁):辩证逻辑思维开始快速发展,但水平仍低于形式逻辑思维。高中阶段的机器人教育要求学生了解机械传动与单片机基本知识,能制作简易机器人,具体包括:在硬件上,要充分利用模块化机器人可扩展性的特点,通过对模块的不同组合,学习机械传动的相关原理;在软件上,要利用模块化机器人开放性的特点,充分利用网络共享资源,学习机器人编程知识,并运用C、C++、MATLAB等语言完成简易程序的编写与烧录。
⑤高等教育阶段(18岁后):以辩证逻辑思维为主导,认知发展水平逐渐趋于稳定。在高等教育阶段(主要指大学和研究生阶段),机器人教育的主要目的是应用与开发机器人系统,为此,学生要基于模块化机器人学习机构学、运动学、动力学、控制、机器视觉、人工智能、机器学习、人机共融等多方面的知识,为开发服务机器人、医疗与康复机器人、仿生机器人、生物机器人等新型的机器人做好知识储备。
2 模块化机器人教育课程体系的特点
模块化机器人具有成本低、入门难度低、开放度高、可扩展性强、智能化程度可持续升级等优点,而且集娱乐、比赛、课堂教学于一体,是解决目前我国中小学机器人教育困境的有效途径。将模块化机器人作为中小学乃至大学、研究生阶段机器人教育的载体,对于推动我国机器人教育的健康、规范、可持续发展有着积极的作用。在本研究构建的模块化机器人教育课程体系中,教学内容从易到难,循序渐进,既有动手实践内容,又强调理论知识的学习,注重学生的全面发展和可持续发展;同时,该体系将教学内容按照机器人的智能化程度进行等级划分,使教学内容与学生各个阶段的认知水平紧密结合,符合最近发展区理论,促使学生在教师的指引下或小组的合作中激发创造潜能,培养创新思维和创新能力。
四 小结
本研究通过对中小学机器人教育的现状进行分析,基于TRIZ理论提出了机器人教育困境的解决策略,即采用模块化机器人作为我国机器人教育的载体。在此基础上,本研究结合认知发展规律,构建了可持续发展的模块化机器人教育课程体系。在当下国家创新教育改革中,创新人才的培养是关键,但创新人才的培养并非一朝一夕之事,而是需要巨大的经费投入和广大教育工作者坚持不懈的努力与积累。而模块化机器人教育可以缩短创新人才培养的周期、减少教育经费的投入、加速师资培养、促进农村地区机器人教育的公平,是创新应用型人才培养体系的重要组成部分。需要指出的是,本研究构建的模块化机器人课程体系还不够完善,有待教育工作者不断丰富其内容,并在教育实践中去检验。此外,我国中小学机器人教育在推进的过程中也不可避免地会遇到很多挫折,这需要广大科研工作者与一线中小学机器人教师紧密合作,积极应对各种挑战,从理论和实践层面推动中小学机器人教育研究的不断深入。
[1]陆文虎,曲庆彪,孙立川.关于在青少年中开展机器人制作教育的思考[J].教育科学,2005,(6):42-45.
[2]王凯,孙帙,(日)西森年寿,等.日本机器人教育的发展现状和趋势[J].现代教育技术,2017,(4):5-11.
[3]王小根,张爽.面向创客教育的中小学机器人教学研究[J].现代教育技术,2016,(8):116-121.
[4]钟柏昌,张禄.我国中小学机器人教育的现状调查与分析[J].中国电化教育,2015,(7):101-107.
[5]王益.融入STS教育理念的机器人教学探索[J].中国电化教育,2009,(3):90-92.
[6]张新,秦志强.小学教育本科专业开设机器人课程的探索[J].当代教育理论与实践,2010,(4):1-3.
[7]黄荣怀,刘德建,徐晶晶,等.教育机器人的发展现状与趋势[J].现代教育技术,2017,(1):13-20.
[8][11]杨清亮.发明是这样诞生的:TRIZ理论全接触[M].北京:机械工业出版社,2006:148-167.
[9]Marsh D G. 40 Inventive principles with applications in education[OL].
[10]周琴,于加,李伟青.基于TRIZ教育理论改革工程制图课程体系[J].工程图学学报,2011,(3):91-94.
[12]曹燕军,葛为民,张华瑾.一种新型模块化自重构机器人结构设计与仿真研究[J].机器人,2013,(5):568-575、606.
[13]Yim M, Roufas K, Duff D, et al. Modular reconfigurable robots in space applications[J]. Autonomous Robots, 2003,(2-3):225-237.
[14]林崇德.发展心理学(第二版)[M].北京:人民教育出版社,2008:185-493.
Research on the Modular Robot Education in Primary and Middle Schools
HUANG Qin1TAO Yun1[Corresponding Author]WANG Yu-jin2WU Chang-lin2
To solve the problems of imperfectly theoretical system, weak teacher resources, unbalanced development between urban and rural areas, inconsistent standards of educational robots, this paper established the problem-solving model of the robot education in primary and middle schools based on the Teoriya Resheniya Izobreatatelskikh Zadatch (TRIZ) theory. In addition, the strategy of using modular robots to promote the robot education in primary and middle schools was proposed. Based on this strategy and combined with the law of cognitive development, the curriculum system of the modular robot education was constructed. Using the modular robot as the supporter of the robot education could be an effective method to solve the predicament of the robot education in primary and middle schools and motivate to the healthy, normative and sustainable development of the robot education.
robot education; modular robots; TRIZ theory; primary and middle schools
G40-057
A
1009—8097(2018)07—0113—07
10.3969/j.issn.1009-8097.2018.07.016
本文受国家自然科学基金“基于闭链弓形五连杆的四足机器人动态翻滚机理研究”(项目编号:51275363)、自然科学基金“民族双语者的认知控制”(项目编号:31660282)、云南师范大学研究生科研创新基金“感知可用性评价中的情感状态研究”(项目编号:2017019)资助。
黄芹,在读硕士,研究方向为教育心理学、认知心理学,邮箱为husthuang2019@163.com。
2017年11月11日
编辑:小米