基于差分进化PID控制的同步发电机励磁系统研究
2018-07-31陈金张孝王平闵国君李颖杰陈峰
陈金,张孝,王平,闵国君,李颖杰,陈峰
(1.贵州电网电力调度控制中心,贵州 贵阳 550002;2.南京南瑞继保工程技术有限公司,江苏 南京 211102)
0 引 言
灵敏准确的发电机励磁调节系统对于维持系统的电压稳定、减小发电机故障损失等方面具有重要作用。目前PID控制仍然是其主要控制方法。常规的PID控制器具有结构简单,稳健性好,容易实现等优点,能满足一般工业控制的要求[1-2]。
新能源的快速发展增加了电力系统的复杂性,同时对发电机的励磁控制提出更严苛的要求,普遍采用的PID控制技术,其控制性能很大程度上取决与PID参数的优劣。因此,不少学者尝试利用智能控制来优化PID参数,譬如将模糊控制与PID控制结合,优点是无需数学模型,结构简单,实现方便,但关键的模糊规则设计,依赖主观经验,在工况突变情况下,不能保证控制性能的稳定[3-4]。文献[5]将神经网络用于PID优化,神经网络的优势是对复杂非线性系统的拟合能力,但计算量大、实现困难是其缺陷;文献[6]采用粒子群算法优化PID参数,粒子群算法速度快,精度高,但算法需要设置的参数多,不稳定,易早熟。差分进化算法(Differential Evolution,DE)作为一种新的进化算法,因其在国际算法比赛中的优异表现而受到关注,其采用基于差异的变异操作,提高了进化效率。相比于粒子群优化,DE所需参数少,同时因为进化策略中计及了变量相关性,对于发电机非线性环节中的多变量耦合问题具有明显优势[7-8]。
本文根据励磁调节系统的综合性能指标,应用差分进化算法优化励磁控制器的PID参数,并将优化得到的结果,在电力系统模拟实验装置上进行验证。
1 励磁系统数学模型
同步发电机励磁系统基本由励磁控制、功率放大、发电机本体和电压反馈等环节组成,其主要作用是根据系统负荷变化调节励磁电流,目标是控制机端电压和无功分配,保证并列发电机的动态与静态稳定[9-10]。从研究励磁系统动态特性的角度出发,采用工程近似的办法,功率单元、测量单元和发电机均可简化为一阶惯性环节,励磁系统数学模型如图1所示。当系统电压改变时,励磁调节系统通过指定电压U*与反馈测量电压u的比较,得到电压偏差,经PID调节后再将控制信号放大,控制同步发电机的输出电压,直至机端电压达到稳定。图1中KG、KC、KA分别为发电机、测量单元和功率放大单元的增益,Td0、TR、TA为其时间常数。

图1 发电机励磁系统数学模型
2 差分进化PID控制器设计
2.1 差分进化算法
差分进化算法基本流程:假设有M个待优化参数,则NP个M维向量Yi,G(i= 0,1,2,…,NP-1)构成一个个体,这里G为代数,i为个体标号。
1)初始种群的产生
初始种群是在设定的空间内随机产生的,对种群内的每个个体计算其适应度。适应度函数通常是最小值函数,因此适应度越小越好。所有个体运算后适应度值最小的个体为当前最优个体,记为Ybest,其适应度值记为Vbest。
2)进化过程
(1)变异。目的是使当前一代的所有向量Yi,G都增加一个扰动向量:Vi,G+1=Ybest+F·(Yr1,G—Yr2,G) 。其中整数r1,r2∈[0,NP-1]是随机产生的,并且i≠r1≠r2。缩放算子F是控制变量(Yr1,G—Yr2,G)的放大倍数。因为Yr1,G、Yr2,G在抽取时的随机性,所以Vi,G+1的产生与Yi,G保证了相对独立性。
(2)交叉。交叉是制造新个体的主要操作。为此对Yi,G和Vi,G+1进行交叉操作,产生向量如下:
Ui,G+1=(U0,i,G+1,U1,i,G+1,…,UD-1,i,G+1)
(1)
其中
(2)
式中:j=0,1,…,D-1,rand是一个在[0,1]均匀分布的随机数;R(i)是一个随机整数且R(i)∈[0,D-1];交叉概率CR∈[0,1]。交叉操作得到的新个体,丰富了种群的多样性。
(3)选择。作为新的个体Ui,G+1并不能自然成为下一代种群的新个体Yi,G+1,还需要和Yi,G竞争。竞争策略:计算二者的适应度值,性能更优的个体最终延续至下一代。全部的变异、交叉和选择操作构成了一次完整的进化。
DE算法的控制参数很少,只有缩放算子F、种群规模NP及交叉算子CR,参数设计是否得到,对算法性能有重要影响。
个体变异中扰动向量的大小由缩放算子F决定,在种群多样性和收敛性上起到平衡作用[11]。本文根据优化不同阶段对多样性和收敛性的不同要求,采用递减方法调整F:
(3)
式中:m为进化代数的当前值;M为进化代数的最大值;Fmax,Fmin分别为缩放算子F的上下限。这个方法的思路是优化初期需要扩大搜索范围,增加搜索到最优解的机会,这时F应当取大一点,越到后期,期望能在局部范围进行更细致的搜索,更快得到最优解,此时F应该设置小一些。
交叉算子CR决定了交叉操作产生新个体的几率。由式(2)可知,CR的取值增大,Vi,G+ 1出现在Ui,G+1向量中的几率增加,局部搜索能力增强,收敛速度快;反之,则Yi,G出现在Ui,G+1向量中几率增加,全局搜索能力增强,种群多样性好。因此为了兼顾多样性和收敛速度,采用递增算法:
(4)
式中:CRmin=0.1;CRmax=0.9。CR取值较小,种群多样性得到保证,CR随着搜索深入不断增大,在明确搜索方向的前提下,由全局搜索逐步转为小范围的精细搜索,以便更快地得到最优解。
2.2 基于差分进化的PID参数整定
本文将PID控制器的三个参数(比例系数KP,积分系数Ki以及微分系数Kd)以浮点数编码作为一个向量(Kp,Ki,Kd),这个向量构成种群的一个个体。
为了将搜索范围固定在一个相对合理的空间,本文先用Ziegler-Nichols (ZN)法整定得到PID初始值,以此为中心向两头延伸,构成算法的搜索空间,提高初始搜索的成效。确定控制器参数搜索范围的不等式如下所示:
αKp*≤Kp≤βKp*,αKi*≤Ki≤βKi*,
αKd*≤Kd≤βKd*
(5)
式中:Kp*、Ki*、Kd*为ZN法的整定值;α、β为延拓系数,分别取α=0.2,β=5。
适应度函数是校核优化性能指标的关键函数,通常会采用以下三种误差积分指标:绝对误差积分指标(IAE)、平方误差积分指标(ISE)和时间加权平方误差积分指标(ITSE)。IAE指标有适当的阻尼,稳态性能好,但响应时间增加,ISE指标响应速度快,但相对稳定性差,而ITSE指标能够比较全面反映系统性能和响应时间,但其公式推导繁琐,为此提出以下较为简洁的电压综合性能指标适应度函数:

(6)
式中:ts为电压调整时间;tr为电压上升时间;ω为权重系数且ω∈[0,1];σ为电压的超调量;ei为电压输出误差。该函数综合了电压稳态性能和响应时间,ω调整二者之间的比例关系,如果侧重于电压稳态精度与超调量,需要增大ω;若侧重于电压响应时间,则可以减小ω。优化过程就是寻找一组控制参数Kp、Ki及Kd使得综合性能函数f最小化。当适应度小于设定的最小门槛,或者寻优代数达到最大,则最优解即是所求PID参数。差分迭代求取最优PID参数的步骤如图2所示。
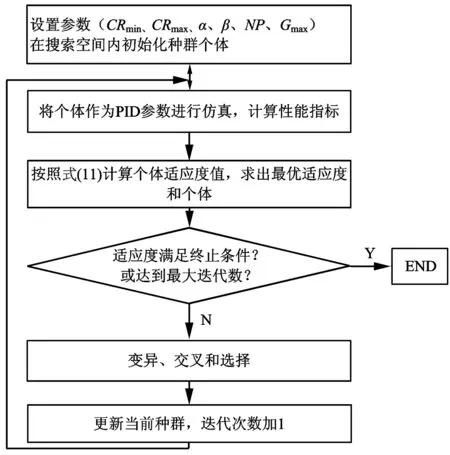
图2 励磁PID参数的差分迭代流程
3 实验验证
本文以贵州某一电厂1号机组为例,机组容量367 MVA,50 Hz,额定电压20 kV,功率因数为0.95,额定励磁电压为298 V,额定励磁电流为2 480 A,空载励磁电压为113 V,空载励磁电流为987 A。
发电机励磁参数设定如下:线路增益Kl=55,发电机增益KG=1,测量单元增益KC=1,功率放大单元增益KA=5.97;功率单元时间常数TA=0.003,电压测量时间常数Tr=0.015,发电机时间常数Td0=2。
差分进化算法参数设定如下:种群规模NP=40,总迭代次数Gmax=150,交叉算子CRmin=0.1,CRmax=0.9,缩放算子Fmax=0.9,Fmin=0.3,权重系数ω=0.7。
为了更好地验证差分进化PID控制方法的有效性,本文将粒子群优化的PID控制器与之对比,其中粒子群仿真参数设定如下:粒子种群N=50,加速算子c1=c2=2.0,标准PSO惯性权重ω=1,粒子位置Xmax=0.01,Xmin=-0.01,速度限制Vmax=0.15,Vmin=-0.15。
分别采用差分进化和粒子群优化得到的PID参数在南瑞公司的RTDS(Real Time Digital Simulators)实验装置上进行验证。RTDS是实时电力系统模拟设备,强大的运算能力可以保证电磁暂态过程的快速求解并连续实时输出,因而能够反映电力系统中的实际情形。根据电厂实际机组参数,在RTDS中构建自定义发电机励磁闭环实验系统。在RTDS系统中分别采用两种优化方法得到的PID参数,进行三相短路延迟切除、3%阶跃扰动干扰先下后上的实验。实验波形如图3和图4所示。

图3 线路三相短路延迟切除的实验结果对比
实验结果显示,基于差分进化PID的发电机励磁系统,相比于粒子群优化的PID控制系统,在受到小干扰时电压波动减小,遇到大干扰时动态降落小,恢复时间更快,动静态性能更好。
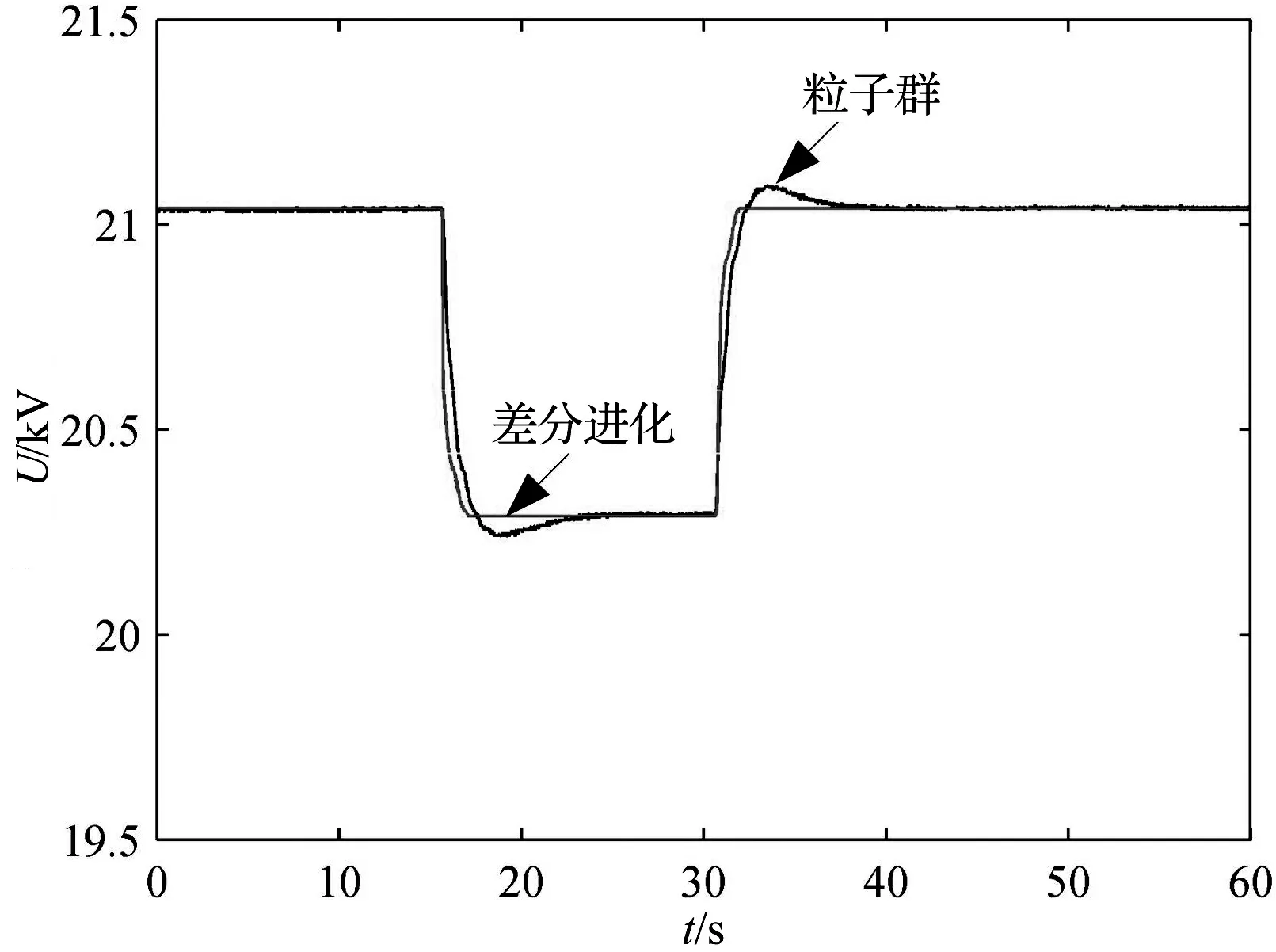
图4 系统受到3%阶跃扰动干扰先下后上的实验结果对比
4 结束语
发电机励磁控制是保证电路系统稳定的重要手段,本文分析了智能控制应用于PID励磁调节的优缺点,提出了采用差分迭代优化PID调节参数的新方法,该方法以电压控制性能综合指标为目标,对励磁系统的PID参数进行优化。差分进化算法与其他进化算法相比,收敛能力强,鲁棒性好,效率高,在此基础上将差分进化PID控制策略与粒子群PID励磁控制方法对比,并在电力系统实时模拟设备RTDS上进行实验验证,结果表明:本文所提出的方法进一步提高了励磁控制系统的稳态与动态性能,证明了本文所提出方法的正确性与有效性。
