基于双轴舵机云台光伏逐日模拟系统设计
2018-07-31杨英明
杨英明
(辽宁轨道交通职业学院 铁道工程系,辽宁 沈阳 110023)
光伏逐日系统又称太阳能追日系统,是光热和光伏发电过程中,最优化太阳光使用,达到提高光电转换效率的机械及电控单元系统。保持太阳能电池板随时正对光源,让光线随时垂直照射太阳能电池板的动力装置,采用该系统能显著提高光伏组件的发电效率。一个设计合理的光伏跟踪系统可以将整个系统提高40%的效率,而本身电机的耗电一年只有20 kW·h,并且成本低廉、安装方便。
采用4块太阳能电池板模拟光照度传感器,通过对太阳能电池板电压的检测就能够检测出东西南北4个方向的光照度,单片机通过对比4个方向的光照度,当4个方向的光照度不均衡时,说明此时逐日系统板不是正对着太阳的,所以需要对双舵机云台进行方向的调节使4个方向的光照度大小一致。该系统还额外设计了4个光敏电阻模块,是太阳能电池板的补充设计,它可以检测附近是否有光和光强为多少,可以输出模拟和数字信号传输给单片机,通过单片机的判断进行逐日系统的方向调节,保证在4块太阳能电池板失效的情况下,系统通过切换模式还可以继续稳定工作。
该设计的智能光伏逐日型运动控制系统是利用舵机云台双轴驱动,采用光电跟踪的方法,光电传感器根据入射光线的强弱变化产生反馈信号到微机处理器进行处理的综合模拟系统。它是一种有效利用太阳能的自动装置,具有广泛的应用前景。
光伏逐日模拟系统设计简图如图1所示。
1 系统方案设计
模拟逐日系统总体共分为5个部分,分别为上位机(控制端软件)、下位机(光伏逐日控制板)、双轴舵机云台、逐日系统感知部分、电源系统。
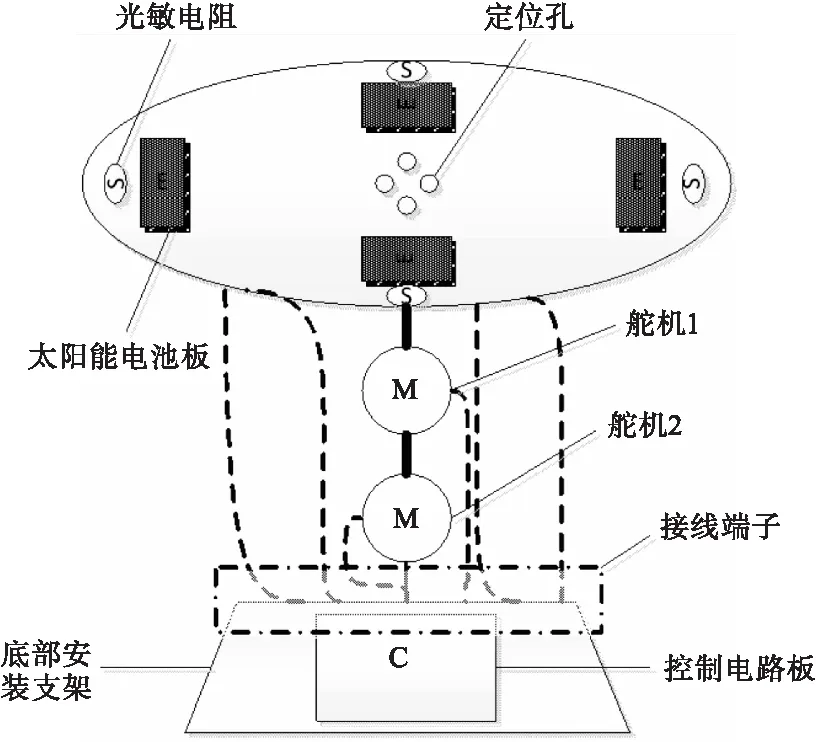
图1 光伏逐日模拟系统
上位机部分主要包含基于移动终端开发的手机软件和基于PC端的软件,它们分别通过蓝牙通信模块和232通信模块与光伏逐日控制板进行通信,主要负责读取太阳能电池板所发出的电压和当前的光照度,并通过软件对逐日系统进行主动或被动调节,保证逐日系统始终正对着太阳,以实现发电效率的最大化。
下位机部分即光伏逐日控制电路板,它是整个逐日系统的控制中心,提供了很多接口,包括双轴舵机云台的控制接口、蓝牙和232通信接口、多路电源接口、四路太阳能电池板电压检测接口、四路光敏电阻模块接口等。整个系统的工作是通过读取现场数据,根据单片机程序进行判断检测和计算向上位机传输信息,同时接收上位机发出的控制指令,最终通过PWM信号对舵机进行控制,从而实现逐日系统的整个工作过程的运行。
电源系统部分采用的是两级电源系统,整个系统采用12 V进行供电,第一级通过MP1584EN稳压模块进行稳压得到6.6 V~7.2 V,给舵机进行供电;第二级通过第一级得到的电压通过HT7350进行稳压得到5 V,给整个逐日系统进行供电。
双轴舵机部分是实现整个逐日系统“逐日”功能的最终实现部分,它可以通过两个交叉连接的大扭矩舵机,由光伏逐日控制板去实时控制,实现东西南北4个方向的模拟转动,从而带动安装在上面的逐日板转动进而去追踪太阳。
逐日系统感知部分能够实时检测4个方向的光照度,采用4块太阳能电池板和光敏电阻结合的方式,将逐日板4个方向的光照度传输给控制板,控制板通过AD转换检测等方法进行光照度的判断,根据一定的算法对舵机云台进行控制,从而实现逐日功能。
系统方案设计框图如图2所示。
2 硬件电路设计
在该设计中,一共分为6个模块:电源模块、单片机最小系统、通信及下载模块、舵机驱动模块、四路光敏电阻模块、四路光伏电池AD转换模块。
2.1 电源模块
设计采用两路供电方式,分别为控制电和动力电。控制电为控制板上单片机和所有外围电路进行供电,供电电压为5 V。动力电主要为舵机进行供电,供电电压为7.2 V,保证满足舵机转矩的需求。
控制电和动力电来自于12 V的开关电源或采用锂电池的供电方式,12 V电源经过MP1584EN稳压模块可以得到0~12 V连续调节的电压,在系统组装调试过程中需要调试到6 V~7.4 V,给舵机进行供电。将调试好的6.6 V~7.2 V电压经过HT7350进行低压差稳压得到5 V电压,满足整个光伏逐日控制板的供电需求。
2.2 单片机最小系统
系统采用的单片机型号为STC15F2K60S2,该单片机与51单片机兼容,主要增加了一些外设和相应的寄存器,在系统中主要应用其八通道12位精度的ADC口,可以同时将4块太阳能电池板的电压进行AD转换,得到4个方向对应的光照度,作为逐日系统调整的依据。
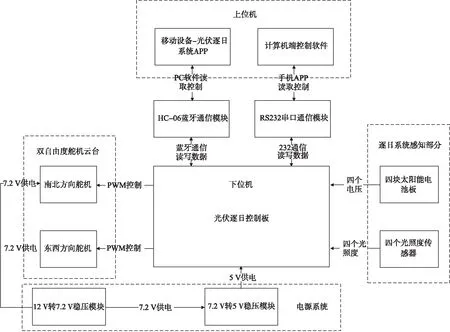
图2 系统方案
2.3 通信及下载模块
通信电路采用蓝牙透传通信和232通信相结合的方式。蓝牙透传通信的目的是将光照度等数据传输给手机软件,逐日系统也能够接收手机APP的控制指令,实现对逐日系统的控制,这样就保证了工程人员能够随时随地的查看数据和对逐日系统进行控制。系统由于需要经常更新程序,以往在更新程序时需要重启整个系统,导致整个系统失电,该系统采用如图3所示下载电路,在下载程序过程中只影响单片机的供电不影响系统供电。
2.4 舵机驱动模块
系统采用的双轴舵机云台是RDS3115MG大扭力机器人数字舵机,在7.2 V工作电压下,可以输出17 kg·cm大扭力,实现-90°~ +90°的角度连续调节,发送一次PWM信号就能够锁定角度不变,控制精度高、线性度好、相应速度快,还可以进行PID控制,满足系统对于扭矩和角度的需要。由于系统需要进行东西南北4个方向的角度调节,所以系统需要同时对两个舵机进行控制,这就对系统电源功率要求较高,要求最大输出电流达到2 A。
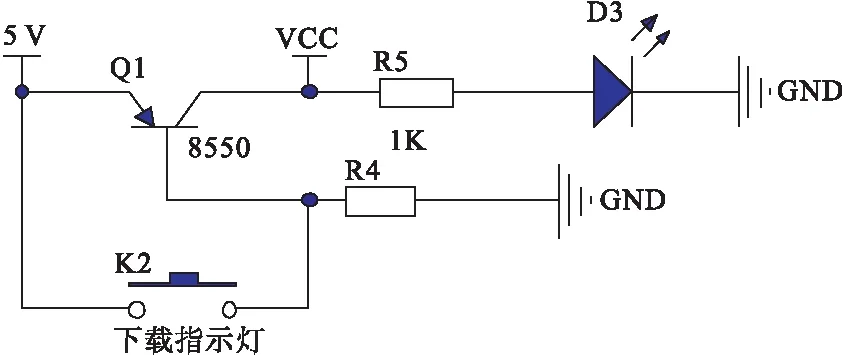
图3 逐日系统下载电路
2.5 四路光伏电池AD转换模块
系统在逐日板上东西南北4个方向分别放置了一块低功率太阳能电池板,用太阳能电池板输出的电压来模拟4个方向的光照度,不同的光照度说明逐日板不是正对着太阳光,此时需要按照特定算法来调节逐日板。四路光伏电池的电压需要由单片机的ADC接口进行检测,但不能进行直接检测,需要在电池板和单片机中间加中间转换电路将电压转换成0~5 V之间,转换电路如图4所示。
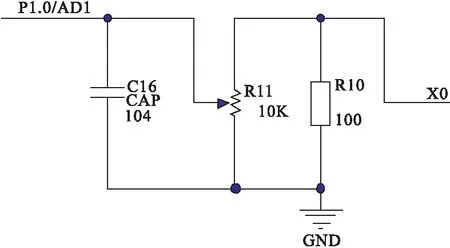
图4 电压转换电路
2.6 四路光敏电阻模块
四路光敏电阻模块是对光伏电池AD转换模块的补充,在光伏电池失效的情况下,光敏电阻可以检测附近是否与有光以及光强的模拟值大小,该模块可直接输出TTL电平,与单片机系统兼容。
3 系统软件设计
系统的软件设计分为上位机和上位机。上位机是手机APP和PC端通信软件,可以实现远程对光伏逐日系统的控制,手机APP采用APP Inventor来完成。下位机是光伏逐日控制板中的单片机程序,完成系统的现场光照数据采集、AD转换、与上位机通信、控制策略算法和舵机的实时控制。下位机程序设计中的检测有两种方法:光伏电压检测法和光敏电阻检测法。下位机程序还可以实现上位机对其进行主动控制(自动调节)和被动控制(手动调节)两种控制模式。
3.1 下位机程序设计
1)光伏电池电压检测法
光伏电池电压检测法是利用逐日板上放置的4片5 V/0.3 W的太阳能电池板,根据光照强度和输出电压的关系,光照强度越大,输出电压就越大,可以对太阳能电池板的输出电压进行转换和检测,再根据一定的控制策略对双轴舵机云台进行控制。光伏电池电压检测法程序流程如图5所示。
2)光敏电阻检测法
光敏电阻检测法是利用单片机检测光敏电阻模块输出的TTL电平的高低电平。在系统设计中,在光敏电阻后面加上了一块挡板,用来挡住其他光源的光,当4个光敏电阻都检测到光超过设定阈值时,模块的DO端会输出低电平,此时逐日板不进行调节,当有光敏电阻检测不到光时,DO端输出高电平,此时舵机云台按照一定规律进行调节直到4块光敏电阻都检测到光。光敏电阻模块还具有模拟量AO输出功能,通过AD转换可以获得环境光强度更准确的数值。光敏电阻检测法和光伏电池电压检测法的程序设计思路类似,不再赘述。
3.2 上位机程序设计
光伏逐日系统共有两种工作模式:主动模式(自动控制)和被动模式(手动调节)。当手机APP开启主动模式时,逐日系统根据环境光照自动调节双轴舵机云台进行逐日,即自动进行调节。当手机APP开启被动模式时,逐日系统会完全受上位机控制,通过查看APP界面上东西南北的光照度情况,然后通过方向键控制舵机云台的转动从而调节逐日板的角度,使逐日板正对太阳光直到4个方向的光照度相等为止。
1)主动模式
主动模式控制界面如图6所示。当勾选自动逐日模式选项后,手机APP会向逐日系统发送“5”系统利用上述的光伏电池电压检测法来检测光照度,逐日系统会进入主动逐日模式,此时手机APP上东西南北4个方向键都会被禁用,不可以进行手动调节,APP会实时显示4个方向的光照度,当4个方向的光照度都相等时,说明逐日板已经正对太阳光,自用调节过程结束。

图5 光伏电池电压检测法程序流程
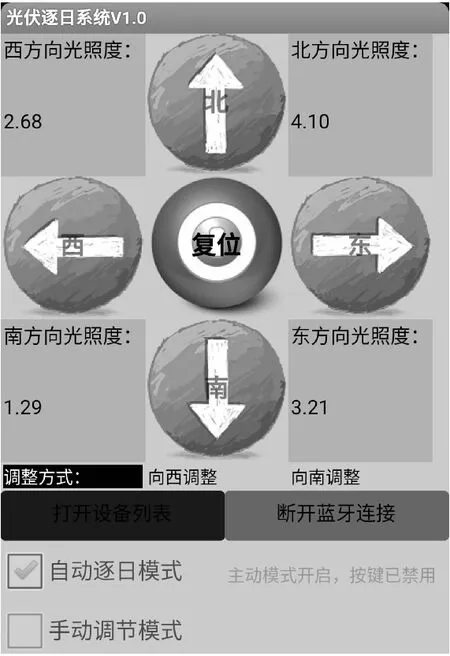
图6 主动模式控制界面

图7 被动模式控制界面
2)被动模式
被动模式控制界面如图7所示。当勾选被动逐日模式选项后,4个方向按键会被启用,此时逐日系统受手机APP方向键控制,每个按键按下对应不同的信息,如当APP按下复位按键时,逐日系统会进行系统复位,程序中设定复位后系统处在正午位置,即舵机云台都处在0°位置。东西南北4个按键分别控制舵机云台的转动,通过观察4个方向的光照度数据来判断是否继续调节以及调节的方向。手机APP发送的控制指令的信息、执行动作及功能说明见表1所示。

表1 手机APP控制指令表
4 系统的实际应用
目前使用广泛的有4种太阳光伏自动跟踪系统,包括水平单轴跟踪、双立柱斜单轴跟踪、垂直单轴跟踪和双轴跟踪,其中水平单轴跟踪和倾斜单轴跟踪、垂直单轴跟踪只有一个旋转自由度,双轴跟踪具有两个旋转自由度。
该系统中采用的是双轴跟踪的方法对太阳进行即时跟踪,使太阳能接收装置能够始终正对太阳,从而提高吸收效率。具体要求如下:
1)太阳能电池板在0~180°内自动跟踪太阳,使入射光垂直照射;
2)根据季节变化太阳能电池板可调整维度;
3)自动跟踪系统使用此太阳能电池板供电力工作;
4)使用该系统后使太阳能电池板提高效率≥30%;
5)此设计系统能够长期室外运行。
实际系统包括:控制部分、转向机构、太阳能采集装置、控制器、直流负载、储能装置、逆变器、交流负载,系统组成效果图和框图如图8、9所示。

图8 实际逐日系统效果

图9 实际逐日系统组成
5 结 语
阐述了一种利用双舵机云台作为执行机构,太阳能电池和光敏电阻作为检测机构,单片机控制板作为控制机构的光伏逐日系统,论述了系统整体的设计过程及硬件电路设计的6个模块的设计方法,系统软件设计中的上位机程序设计和下位机程序设计。下位机程序设计有光伏电池电压检测法和光敏电阻检测法两种方法,上位机程序设计有主动模式和被动模式两种模式。同时,还详细介绍了逐日系统手机APP,利用该APP可以远程对逐日系统进行转动控制,可以在APP上查看4个方向的光照度以及设置自动逐日和手动调节模式。该系统目前只是模拟系统,距离实际的应用还有距离,部分功能还需进一步完善,包括舵机云台的PID调节、转动机械结构的设计、逐日板高度调节等。
